
Вращающимся, или как его еще называют, поворотным трансформатором (ВТ), называют электрические устройства индукционного типа, предназначенные для получения определенных значений переменного напряжения, в зависимости от угла поворота ротора. Конструкция поворотного трансформатора состоит из статора и ротора. Они выполнены из набранных и изолированных между собой пластин из электротехнической стали, в которых сделаны пазы для укладки обмоток: двух взаимно перпендикулярных на роторе, и двух взаимно перпендикулярных на статоре. Пространственный сдвиг обмоток ротора и статора составляет 90 угловых градусов относительно друг друга. Концы обмоток статора закрепляются непосредственно на неподвижных клеммах, а концы обмоток ротора подсоединяются к клеммам через токосъемные щетки или контактные кольца. Если угол поворота ротора ограничен, то допускается соединение обмоток ротора с клеммником, посредством гибких проводников. В зависимости от способа включения обмоток ротора и статора, поворотный трансформатор может быть: На сегодняшний день, наиболее востребованными вращающимися трансформаторами являются устройства, основанные на синусно-косинусном подключении обмоток ротора. Если поворотный трансформатор применяется в режиме поворота ротора до определенного угла, то обмотками компенсации и возбуждения этого устройства будут являться обмотки статора. В случае применения ВТ в режиме непрерывного вращения, в качестве компенсационной и возбуждающей обмоток будут выступать обмотки ротора, а в качестве вторичных обмоток – статора. Если устройство применяется в качестве измерительного прибора, то ВТ применяется со специальным редукторным механизмом повышенной точности позиционирования ротора. Редуктор может иметь внешнее подключение к валу устройства, а может монтироваться непосредственно в корпус поворотного трансформатора. При подаче переменного тока со стабилизированным напряжением определенного значения на обмотку возбуждения, вырабатывается пульсирующий магнитный поток, который индуцирует электродвижущую силу в обмотках ротора, значение которой прямо пропорционально углу поворота ротора. Этот угол отсчитывается от положения ротора, когда его обмотка находится перпендикулярно к оси обмотки возбуждения. Магнитные потоки, создающие электродвижущую силу в обмотках ротора, можно разделить на две группы: продольные, совпадающие с осью обмотки возбуждения и поперечные, к оси обмотки возбуждения. Продольные потоки приводят в движение ротор вращающегося трансформатора, а поперечные магнитные потоки, индуцируемые в обмотках, приводят к появлению погрешностей. Для борьбы с поперечными магнитными потоками, в современном приборостроении применяют метод симметрирования, который может быть выполнен как на обмотках статора, так и ротора. Симметрирование на обмотках ротора заключается во взаимной компенсации поперечных магнитных потоков нагрузкой, в роли которой выступают два сопротивления одинаковых по значению. При симметрировании на обмотках статора происходит ослабление поперечных магнитных потоков за счет эффекта размагничивания перпендикулярно расположенной к ней обмотки статора. Пределы погрешностей наиболее распространенных двухполюсных синусно-косинусных поворотных трансформаторов, варьируются в пределах 0,005 — 0,2 %. Погрешность высокоточных ВТ не должна превышать значений 0,01 – 0,03 %. Погрешность поворотных трансформаторов, выступающих в качестве синхронизирующих датчиков, составляет 1-10 угловых минут. Прецизионные трансформаторы поворотного типа имеют погрешность не более 1 угловой минуты. Если требуется более высокая точность позиционирования, то в таком случае, чаще всего, применяются многополюсные ВТ. Погрешность такого устройства не превышает 30 угловых секунд. Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго. podvi.ru Схемы включения сельсинов где y - константа. Таким образом, информацией об угловом положении является сдвиг фазы j между питающим и выходным напряжениям. Достоинством режима фазовращателя является линейность сдвига фазы j от угла a и удобство преобразования данного сдвига в цифровой код положения. В трансформаторном режиме однофазная обмотка питается переменным напряжением При этом создается пульсирующий магнитный поток возбуждения, направленный по оси однофазной обмотки. Этот поток наводит в фазах трехфазной обмотки ЭДС е1, е2, е3, величина которых зависит от угла a, где n=1, 2, 3; k1 – коэффициент трансформации; a - угловое положение между осью однофазной обмотки и осью первой фазы трехфазной обмотки. В трансформаторном режиме информацией об угловом положении является величина напряжений трехфазной обмотки. На основе сельсинов также строятся системы дистанционной передачи угла (СДПУ) или, иначе говоря, системы синхронной связи (ССС). В СДПУ обеспечивается синхронный поворот механически не связанных осей. Можно выделить две основных разновидности СДПУ на основе сельсинов – индикаторную и трансформаторную системы синхронной связи. Схема индикаторной ССС приведена на рис.1.2. Рис.1.2. Схема индикаторной ССС Исходя из (1.4), в трехфазных обмотках СД и СП наводятся ЭДС, величина которых зависит от угловых положений Если a=0, фазные ЭДС трехфазных обмоток СД и СП равны и токи в данных обмотках не протекают. Если a¹0, фазные ЭДС не равны, в трехфазных обмотках протекают токи, взаимодействие которых с потоками возбуждения СД и СП создает синхронизирующие моменты где Индикаторная ССС характеризуется удельным синхронизирующим моментом Индикаторная ССС используется в случаях, когда для поворота СП не требуется значительных усилий. При повороте ротора СД на тот же угол поворачивается ротор СП. Примером использования индикаторной ССС являются манипуляторы, осуществляющие перегрузку ядерного топлива на АЭС. С координатами манипулятора связаны сельсины-датчики, а на пульте оператора размещены сельсины-приемники с лимбами на валах. По положению роторов СП оператор судит о положении координат манипулятора. Основным показателем точности индикаторной ССС является погрешность следования – отклонение угла поворота ротора СП от угла поворота ротора СД. В зависимости от класса точности сельсинов диапазон данной погрешности от 30' до 1,5°. Схема фрагмента трансформаторной ССС приведена на рис.1.3. Рис.1.3. Фрагмент трансформаторной ССС Для еу можно записать Трансформаторная ССС используется в случаях, когда для поворота механизма, с которым связан СП, требуются значительные усилия. В таких системах выходное напряжение однофазной обмотки СП uу используется в качестве сигнала задания скорости электропривода объекта управления. При наличии uу электродвигатель перемещает объект управления в сторону уменьшения рассогласования α. Погрешность следования трансформаторной ССС от 0,1' до 30'. Одним из параметров трансформаторной ССС является крутизна где Uу – действующее напряжение однофазной обмотки при заданном сопротивлении нагрузки. Величины SТ составляет от 0,5 до 2 В/град. Цель работы Целью работы является изучение конструкций и принципа действия сельсинов, исследование характеристик сельсинов и систем синхронной связи на их основе. Исследование сельсина В трансформаторном режиме Подключить однофазную обмотку одного из сельсинов к источнику однофазного напряжения. Первый канал осциллографа подключить к однофазной обмотке, второй канал – к любым двум выводам трехфазной обмотки. Снять зависимость амплитуды линейного напряжения трехфазной обмотки Umл от угла a. Угол a изменять от 0° до 360° через каждые 30°. Построить график зависимости Umл от a. Синхронной связи Собрать схему в соответствии с рис.1.2. После проверки схемы преподавателем включить напряжение питания и убедиться в работоспособности системы, поворачивая за шкив ротор одного из сельсинов. Затормозить ротор одного из сельсинов. На шкиве другого сельсина закрепить нить для подвешивания груза. Снять зависимость синхронизирующего момента системы Мс от угла рассогласования a, подвешивая к нити грузы разного веса Рг. результаты измерения занести в таблицу. Рассчитать Мс, учитывая, что радиус шкива 2 см. Построить график Мс = f(a). Определить по графику удельный синхронизирующий момент. Системы синхронной связи Собрать схему в соответствии с рис.1.3, используя в качестве СД сельсин с тормозом. Первый канал осциллографа подключить к однофазной обмотке СД, а второй – к однофазной обмотке СП. Затормозить ротор СД. Снять зависимость амплитуды напряжения однофазной обмотки Umу от угла рассогласования a. Угол a изменять от 0° до 360° через каждые 30°. Зарисовать исследуемую схему. Построить график Umу = f(a). По данному графику определить крутизну SТ. Оформить отчет по работе И подготовиться к защите Отчет должен содержать название и цель работы, схемы опытов, таблицы опытных данных, графики полученных характеристик, выводы о соответствии экспериментальных данных и теоретических сведений. 2.5. Контрольные вопросы 2.5.1. Конструкции контактных и бесконтактных сельсинов. 2.5.2. Схемы включения и характеристики сельсинов при их использовании в качестве датчиков положения. 2.5.3. Принцип действия индикаторной системы синхронной связи. 2.5.4. Схема и принцип действия трансформаторной системы синхронной связи. 3. ЛАБОРАТОРНАЯ РАБОТА «ИССЛЕДОВАНИЕ ВРАЩАЮЩИХСЯ ТРАНСФОРМАТОРОВ» Цель работы Целью работы является изучение конструкций и схем включения вращающихся трансформаторов (ВТ), исследование их характеристик. Требования к отчету Отчет должен содержать название и цель работы, схемы включения ВТ, таблицы экспериментальных данных, графики полученных зависимостей, выводы о соответствии теоретических и экспериментальных данных. 3.6. Контрольные вопросы 3.6.1. Конструкции вращающихся трансформаторов. 3.6.2. Схемы включения ВТ и их характеристики. 3.6.3. Назначение и способы симметрирования ВТ. МЕТОДИЧЕСКИЕ УКАЗАНИЯ к лабораторным работам«Информационные микромашины»по курсу «Автоматизированный электропривод» для студентов специальности 151002 «Металлорежущие станки и комплексы» и курсу «Приводы роботов» для студентов специальности 220402 «Роботы и робототехнические системы» очной и очно-заочной форм обучения Составители: Муконин Александр Константинович Трубецкой Виктор Александрович Ревнёв Станислав Сергеевич В авторской редакции Подписано в печать 24.11.2005. Формат 60x84/16. Бумага для множительных аппаратов. Усл. печ. л. 1,3. Уч.-изд. л. 1,1. Тираж 120 экз. «С» 357. Зак. № 604. Воронежский государственный технический университет 394026 Воронеж, Московский просп., 14 Схемы включения сельсинов где y - константа. Таким образом, информацией об угловом положении является сдвиг фазы j между питающим и выходным напряжениям. Достоинством режима фазовращателя является линейность сдвига фазы j от угла a и удобство преобразования данного сдвига в цифровой код положения. В трансформаторном режиме однофазная обмотка питается переменным напряжением При этом создается пульсирующий магнитный поток возбуждения, направленный по оси однофазной обмотки. Этот поток наводит в фазах трехфазной обмотки ЭДС е1, е2, е3, величина которых зависит от угла a, где n=1, 2, 3; k1 – коэффициент трансформации; a - угловое положение между осью однофазной обмотки и осью первой фазы трехфазной обмотки. В трансформаторном режиме информацией об угловом положении является величина напряжений трехфазной обмотки. На основе сельсинов также строятся системы дистанционной передачи угла (СДПУ) или, иначе говоря, системы синхронной связи (ССС). В СДПУ обеспечивается синхронный поворот механически не связанных осей. Можно выделить две основных разновидности СДПУ на основе сельсинов – индикаторную и трансформаторную системы синхронной связи. Схема индикаторной ССС приведена на рис.1.2. Рис.1.2. Схема индикаторной ССС Исходя из (1.4), в трехфазных обмотках СД и СП наводятся ЭДС, величина которых зависит от угловых положений Если a=0, фазные ЭДС трехфазных обмоток СД и СП равны и токи в данных обмотках не протекают. Если a¹0, фазные ЭДС не равны, в трехфазных обмотках протекают токи, взаимодействие которых с потоками возбуждения СД и СП создает синхронизирующие моменты где Индикаторная ССС характеризуется удельным синхронизирующим моментом Индикаторная ССС используется в случаях, когда для поворота СП не требуется значительных усилий. При повороте ротора СД на тот же угол поворачивается ротор СП. Примером использования индикаторной ССС являются манипуляторы, осуществляющие перегрузку ядерного топлива на АЭС. С координатами манипулятора связаны сельсины-датчики, а на пульте оператора размещены сельсины-приемники с лимбами на валах. По положению роторов СП оператор судит о положении координат манипулятора. Основным показателем точности индикаторной ССС является погрешность следования – отклонение угла поворота ротора СП от угла поворота ротора СД. В зависимости от класса точности сельсинов диапазон данной погрешности от 30' до 1,5°. Схема фрагмента трансформаторной ССС приведена на рис.1.3. Рис.1.3. Фрагмент трансформаторной ССС Для еу можно записать Трансформаторная ССС используется в случаях, когда для поворота механизма, с которым связан СП, требуются значительные усилия. В таких системах выходное напряжение однофазной обмотки СП uу используется в качестве сигнала задания скорости электропривода объекта управления. При наличии uу электродвигатель перемещает объект управления в сторону уменьшения рассогласования α. Погрешность следования трансформаторной ССС от 0,1' до 30'. Одним из параметров трансформаторной ССС является крутизна где Uу – действующее напряжение однофазной обмотки при заданном сопротивлении нагрузки. Величины SТ составляет от 0,5 до 2 В/град. Схемы включения вращающихся трансформаторов Примеры условных графических обозначений обмоток ВТ приведены на рис.1.4. На рис.1.4,а приведено полное изображение обмоток контактного ВТ, имеющего двухфазные обмотки статора и ротора. С целью уменьшения количества контактных колец два вывода роторной обмотки объединяются. При упрощенном обозначении данного ВТ ротор представляется в виде окружности с соответствующими выводами – рис.1.4,б. Бесконтактные ВТ часто имеют одну роторную обмотку машинной части, которая соединяется с роторной обмоткой переходного кольцевого трансформатора – рис.1.4,в. Некоторые бесконтактные ВТ с ПКТ имеют две роторные обмотки машинной части, одна из которых с целью так называемого первичного симметрирования замыкается накоротко – рис.1.4,г. В зависимости от схемы включения обмоток ВТ и получаемой при этом функции параметров выходных напряжений от угла поворота ротора, в частности, различают: синусный ВТ, синусно-косинусный ВТ, линейный ВТ, фазовращатель. Схема синусного ВТ без симметрирования приведена на рис.1.5,а. Рис.1.5. Схема синусного ВТ без симметрирования (а) ивекторные диаграммы магнитных потоков (б) где wэф – эффективное число витков обмотки статора. Исходя из (1.3), (1.10), максимальное значение пульсирующего магнитного потока по оси d Таким образом, величина потока Фd определяется приложенным напряжением. Поток Фd наводит в синусной обмотке ротора SО ЭДС еS, величина которой является синусоидальной функцией угла поворота α. При холостом ходе, когда сопротивление нагрузки zHS = ∞, напряжение нагрузки где При наличии нагрузки zHS протекает ток iS, который создает поток ФS, направленный по оси обмотки SО. Потоки, создаваемые токами iВ, iS , можно изобразить в виде векторов Для уменьшения погрешностей применяют симметрирование ВТ – первичное и вторичное. При вторичном симметрировании (рис.1.6) обе обмотки ротора – синусная SО и косинусная СО нагружаются на одинаковые сопротивления Рис. 1.6. Схема ВТ со вторичным симметрированием (а) и векторные диаграммы магнитных потоков (б) Токи iS и iС создают потоки Вращающийся трансформатор со вторичным симметрированием фактически является синусно-косинусным. Недостатком вторичного симметрирования является необходимость соблюдения условия (1.13). Рис. 1.7. Синусный ВТ с первичным симметрированием Недостатком первичного симметрирования является зависимость входного сопротивления ВТ от угла α. Это приводит к некоторой погрешности из-за изменения падения напряжения в контуре обмотки возбуждения. где kТ – коэффициент трансформации; Uвых, UВ – действующие значения выходного и питающего напряжений. При kТ = 0,52÷0,56 отклонение зависимости Uвых = f(α) от линейной не более 1 % в диапазоне изменения α от -55˚ до +55˚. Схема фазовращателя с двухфазным питанием приведена на рис.1.9,а. Рис.1.9. Схемы ВТ в режиме фазовращателя К одной из обмоток ротора подключается нагрузка zН. Обмотки статора питаются напряжениями Создаваемое при этом вращающееся магнитное поле наводит в выходной обмотке ЭДС, фаза которой зависит от угла поворота ротора α. Для напряжения нагрузки Uвых можно записать где Um1, ψ – константы; р – число пар полюсов ВТ. Схема фазовращателя с однофазным питанием приведена на рис.1.9,б. К роторным обмоткам присоединяются нагрузка zН, емкость С1 и резистор R1. Для получения режима фазовращателя необходимо соблюдать условия где Частота питания ВТ обычно лежит в окрестности 2 кГц. При этом На основе ВТ также строятся системы дистанционной передачи угла (СДПУ), подобные трансформаторной СДПУ на сельсинах. Возможный вариант такой системы приведен на рис. 1.10. Рис. 1.10. Вариант СДПУ с использованием ВТ Напряжение роторной обмотки ВТ-Д uу, поступающее в устройство управления УУ, является сигналом задания скорости двигателя ОУ. Если a ¹ 0, то и ЭДС uу ¹ 0 и М1 вращает вал ОУ до устранения рассогласования a. При повороте ротора ВТ-Д на заданный угол на тот же угол поворачивается вал, с которым связан ротор ВТ-П. Рассматриваемая система используется, например, в станках с ЧПУ. При управлении координатой станка от устройства ЧПУ используется лишь ВТ-П. Выходные напряжения статорной обмотки ВТ-П служат для получения сигнала обратной связи по положению. При «ручном» управлении система переключается в режим СДПУ (рис.1.10) и координата станка управляется за счет поворота ротора ВТ-П. Вращающиеся трансформаторы являются более точными датчиками, чем сельсины. 2. ЛАБОРАТОРНАЯ РАБОТА «ИССЛЕДОВАНИЕ СЕЛЬСИНОВ» Цель работы Целью работы является изучение конструкций и принципа действия сельсинов, исследование характеристик сельсинов и систем синхронной связи на их основе. lektsia.com Конструктивно ВТ выполняют так же, как АД с фазным ротором. На статоре и роторе ВТ размещены по две взаимно перпендикулярные обмотки. Ротор поворачивают с помощью точного редукторного механизма. Редуктор со шкалами грубого и точного отсчета встраивают в корпус ВТ или изготовляют отдельно и соединяют с валом ВТ. В соответствии со схемой соединения обмоток различают: Схема соединения обмоток СКВТ показана на рисунке 8. Рисунок 8 Рисунок 9 Напряжение питания U1 подано на одну обмотку статора. С роторных обмоток снимаются два выходных сигнала U2 и U3, изменяющиеся соответственно по закону синуса и косинуса в функции угла поворота ротора. Если роторные обмотки подключить к каким-нибудь измерительным цепям, то по обмоткам пойдут токи нагрузки. Под влиянием токов нагрузки синусная и косинусная зависимости искажаются. Для устранения таких искажений выполняются так называемые операции симметрирования ВТ, заключающиеся в подборе соответствующих сопротивлений R1 (первичное симметрирование) и R2, R3 (вторичное симметрирование). Выходные напряжения вторичных обмоток СКВТ могут быть записаны в виде . Коэффициент пропорциональности k зависит от соотношения витков W2/W1 = W3/W1 и при выполнении симметрирования не зависит от угла поворота α (обычно W2 = W3). Схема соединения обмоток ЛВТ показана на рисунке 9. Зависимость выходного напряжения U2 от угла поворота ротора имеет вид Для малых углов α можно принять , а, и зависимостьU2 = ƒ(α) принимает вид , т.е. выходное напряжение имеет линейную зависимость от угла α. Относительная приведенная погрешность ЛВТ при соответствующем выборе обмоточных данных в диапазоне углов α до 50° может не превышать 0,05%. Применение ВТ. Вращающиеся (поворотные) трансформаторы применяют в автоматических устройствах, маломощных следящих системах, вычислительной технике для получения выходных напряжений пропорциональных функциям угла поворота ротора α, например, sinα, cosα или самому углу α. ВТ используют также в качестве построителей для решения геометрических и тригонометрических задач. В автоматических устройствах ВТ работают как в режиме поворота ротора в пределах определенных ограничений угла, так и при непрерывном вращении. Для дистанционных передач угловых перемещений широко применяются также электромашинные элементы автоматики – сельсины. Они имеют однофазную обмотку на статоре и трехфазную обмотку синхронизации на роторе (возможно и обратное расположение обмоток). Сельсины могут работать: На передающей стороне устанавливается сельсин-датчик, а на приемной – сельсин-приемник, который должен автоматически повторять угол поворота сельсина-датчика. В индикаторной схеме включения сельсинов (рисунок 10) обмотки возбуждения сельсина-датчика и сельсина-приемника подключаются к сети переменного тока, а обмотки синхронизации обоих сельсинов соединяются друг с другом проводами линии связи. Рисунок 10 ЭДС в каждой из фаз обмотки синхронизации изменяется пропорционально косинусу угла между осью обмотки возбуждения и осью этой фазы. ЭДС фаз синхронизации датчика, ротор которого повернут на угол α, будут определяться уравнениями ; ; . ЭДС фаз синхронизации приемника, ротор которого повернут на угол β, будут определяться уравнениями ; ; . Под действием разности этих ЭДС по проводам линии связи между обмотками синхронизации пойдут токи ; ; , где Z – сопротивление фаз приемника, датчика и линии связи. В сельсине-приемнике взаимодействие этих токов с магнитным потоком возбуждения вызывает появление вращающего момента. , где kМ – постоянный коэффициент, определяемый обмоточными и конструктивными данными сельсина. Вращающий момент действует и на вал сельсина-датчика, однако, его угол поворота задан механизмом или чувствительным элементом, угловое перемещение которого подлежит контролю. Для сельсинной индикаторной схемы очень важной характеристикой является величина удельного синхронизирующего момента, т.е. момента на 1° рассогласования. Для сельсинов, используемых в промышленности, эта величина составляет (4…50)∙10-4 Нм. Для повышения вращающего момента используется трансформаторная схема включения сельсинов. В этой схеме обмотка возбуждения сельсина-приемника не подключается к сети , а с нее снимается напряжение, которое пропорционально синусу угла рассогласования. Это напряжение подается на усилитель, который питает электродвигатель, приводящий через редуктор сельсин-приемник в согласованное с сельсином-датчиком положение. Одновременно в требуемое положение устанавливается и нагрузка – тот производственный механизм, угловым перемещением которого требуется управлять на расстоянии. Такие автоматические устройства называются следящими системами. Наряду с контактными сельсинами большое распространение получили бесконтактные сельсины. В контактных сельсинах подключение обмоток ротора во внешнюю цепь осуществляется с помощью контактных колец и щеток. В бесконтактных сельсинах обмотки возбуждения и синхронизации размещены на статоре, а изменение магнитной связи между ними по синусоидальному закону обеспечивается с помощью безобмоточного ротора с неодинаковым магнитным сопротивлением по взаимно перпендикулярным осям. Надежность бесконтактных сельсинов существенно выше, чем контактных. studfiles.net Союз Советских Социалистических Республик К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (61) Дополнительное к авт. свид-ву— (22) Заявлено 27.08.79 (21) 2841257/24-07 с присоединением заявки № 2841205/07 (23) Приоритет— (51) М. Кл.з Н 02 К 24/00 Гещмрствеииый комитет СССР Опубликовано 15.10.81. Бюллетень № 38 Дата опубликования описания 15.10.81 по делам изобретений и открытий (53) УДК 621.314. 228 (088 8) А. И. Милюков и Б. П. Леонов (72) Авторы изобретения (7!) Заявитель (54) СХЕМА ВКЛЮЧЕНИЯ ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА Изобретение относится к измерительным электромеханическим устройствам. Известны схемы включения вращающегося трансформатора (ВТ) при работе на нагрузку, в которых для сохранения точности воспроизведения синусно-косинусного преобразования выполнено первичное симметрирование (1). Для выполнения первичного симметрирования ВТ его квадратурная обмотка, смещенная на 90 эл. град. относительно оси обмотки возбуждения замыкается на симметрирующее сопротивление, активная и реактивная составляющие которого равны соответствующим составляющим выходного сопротивления источника питания или схемы питающей цепь возбуждения ВТ. Первичное симметрирование делает выходные сопротивления ВТ неизменными при повороте ротора, и следовательно, при работе на нагрузку точность воспроизведения синусно-косинусных зависимостей сохраняется такой же, как при отсутствии нагрузок, т. е. на холостом ходу. Практически первичное симметрирование ВТ, непосредственно подключаемого к источнику питания, выполняется замыканием квадратурной обмотки накоротко, что обеспечивает с некоторои точностью постоянства выходных сопротивлений ВТ. Но такой метод первичного симметрирования приемлем только при источнике питания, имеющем малое внутреннее сопротивление или при низких требованиях к точности ВТ. Недостатком известных схем включения ВТ является низкая точность симметрирования ВТ, потребность в специальных симметрирующих устройствах и снижение точщ ности работы ВТ при непостоянстве выходного сопротивления источника, питающего ВТ. Цель изобретения — повышение точности ВТ при работе на нагрузку за счет улучшения первичного симметрирования ВТ. 15 Цель достигается тем, что первичные квадратурные обмотки подключены к источнику питания параллельно. Такое выполнение схемы включения ВТ сохраняет работоспособность всей схемы, но обеспечивает точное первичное симметрирование ВТ независимо от величины и постоянства параметров источника, питающего ВТ. Кроме того, питание квадратурной обмотки тем же напряжением, что и основ873345 ной обмотки возбуждения, обеспечивает повышение коэффициента передачи. При использовании кольцевого трансформатора он включается мЕжду источником питания и первичными обмотками. На чертеже показана схема включения ВТ при работе на нагрузку. Схема включения ВТ при работе на нагрузку состоит из источника питания 1 (индукционного или электронного), вращающегося трансформатора 2, имеющего две квадратурные первичные обмотки В Вт и В В, подключенные параллельно к источнику питания, выходных обмоток ВТ C Кя и нагрузок 3 и 4. В общем случае нагрузками могут быть RC-цепи, обмотки других ВТ или другие схемы. Такое подключение входных обмоток ВТ, не меняя существа его работы на нагрузку, не обеспечивает идеальное первичное симметрирование независимо от параметров питающей цепи, и при этом не требует применения каких-либо симметрирующих устройств. Кроме того, при изменении выходных параметров источника питания симметрирование не нарушается. Предложенная схема делает постоянными полные выходные сопротивления вторичных обмоток ВТ и, следовательно, подключение нагрузок не изменяет точность воспроизведения синусоидальных зависимостей выходного напряжения ВТ от угла поворота ротора. Питание обеих обмоток приводит к повышению коэффициента передачи ВТ, увеличивая его в V2 раза. Схема работает следующим образом. При подаче на обмотку В1В напряжения переменного тока от источника 1 ток этой обмотки создает магнитный поток, который наводит в выходной синусной (С i С ) обмотке ВТ напряжение пропорциональное sink, а в выходное косинусной (К|Кг) обмотке ВТ напряжение пропорциональное cos+ где 2 — угол поворота ротора ВТ в электрических градусах, отсчитываемый от положения, при котором взаимная индукция обмоток С Сд и В В обращается в ноль. При подаче напряжения питания на обмотку ВзВ от источника 1, так как ось этой обмотки сдвинута на 90 эл. град. относительно обмотки В В z, на обмотках С > Сг и К К, при этом же отсчете угла 1 соот..ветственно наводятся напряжения пропорциональные sin (. + 90 ) и cos (M + 90 ) . Таким образом, на обмотке CiC наведено суммарное напряжение пропорциональное sink + sin fd + 90 ) = Vg sin (d- + 45 ), а на обмотке KiK cosh+ cos(d + 90 ) = icos(J + 45 ). Следовательно, выходные напряжения ВТ пропорциональны синусу и косинусу угла поворота ротора со смещением начала отсчета на 45 эл. град. и увеличением амплитуды в 117 раза. Поскольку обе первичные цепи замкнуты на одно и то же сопротивление (выходное сопротивление источника питания) в ВТ выполнено первичное еимметрирование. и, следовательно, выходнме сопротивления вторичных обмоток ВТ при изменении угла поворота ротора А не меняется. Это обеспечивает сохранение точности воспроизведения синусной зависимости при подключении любых нагрузок на вторичные цепи. Схема включения ВТ при работе на нагрузку обеспечивает сохранение точности, аналогичной точности холостого хода. Обеспечивает постоянство выходных сопротивлений обмоток, что дает возможность провести точную настройку RC-контуров при использовании ВТ в режиме однофазного фазовращателя. Схема обеспечивает повышение коэффициента передачи в 1Г2 раза. При выполнении ВТ в бесконтактном варианте путем введе1 ния в него кольцевого трансформатора, обмотка возбуждения и квадратурная к ней первичная обмотки, расположенные на роторе ВТ, подключаются параллельно вторичной обмотке кольцевого трансформатора. Такое выполнение бесконтактного ВТ, обеспечивает постоянство выходных сопротивлений его обмоток, устраняет фазовую погрешность и повышает в 1,4 раза его выходное напряжение. Формула изобретения 1. Схема включения вращающегося трансформатора, содержащая источник питаНия и вращающийся трансформатор с двумя квадратурными первичными и вторичными 4О обмотками, отличающаяся тем, что, с целью повышения точности работы на нагрузку, первичные квадратурные обмотки подключены к источнику питания параллельно. 2. Устройство по п. 1, отличающееся тем, что оно снабжено кольцевым трансформа45 тором, включенным между выходными зажимами источника питания и параллельно включенными первичными квадратурными обмотками. Источники информации, 50 принятые во внимание при экспертизе 1. Харцев В. Ф. Электрические микромашины. Л., «Энергия», 1969, с. 79. 2. Панфилов P. К. Принципы построения измерителей рассогласования следящих систем. М., «Энергия», 1973, с. 7 — 8. 873345 Составитель В. Комаров Техред А. Бой кас Корректор А. Ференц Тираж 733 Подписное Редактор Е. Дорошенко Заказ 9066/80 ВНИИПИ Государственного комитета СССР по делам Изобретений и открытий 113035, Москва, Ж вЂ” 35, Раушская наб., д. 4/5! Филиал ППП «Патент», г. Ужгород, ул. Проектная, 4 www.findpatent.ru Bpaщaющиecя (поворотные) трансформаторы (BT) предназначены для получения переменного напряжения, зависящего от угла поворота ротора. По назначению BT относятся к информационным электрическим машинам и применяются в системах автоматического регулирования в качестве измерительных элементов (датчиков угла) для измерения рассогласования между двумя вращающимися Осями. B вычислительных устройствах вращающиеся трансформаторы используют при решении различных математических задач, связанных с построением треугольников, преобразованием координат, сложением и разложением векторов и т.п. Вращающийся трансформатор конструктивно представляет электрическую Машину индукционного типа малой мощности. Наибольшее применение получили двухполюсные BT с двумя парами одинаковых взаимно перпендикулярных обмоток: обмотки и (C1 — C2 и C3 — C4) расположены на статоре; обмотки и(P1 — P2 и P3 — P4) — на роторе (рис.1). Обмотка возбуждения (C1— C2) включается в сеть переменного тока, компенсационная обмотка C3 — C4 замыкается накоротко или на резистор. Обмотки на роторе называются вторичными: синусной P1—P2 и косинусной P3—P4, электрический контакт с обмотками ротора осуществляется с помощью контактных колец и щеток (аналогично контактным сельсинам) либо посредством спиральных пружин, если BT работает в режиме ограниченного угла поворота. B последнем случае yгoл пoвopoтa poтopa BT oгpaничивaeтcя мaкcимaльным yглoм зaкpyчивaния cпиpaльныx пpyжин. П Рис.1Схемы включения вращающихся трансформаторов. Вращающийся трансформатор схема подключения
Вращающиеся трансформаторы: принцип работы, устройство, применение
Конструктивные особенности
Типы вращающихся трансформаторов
Принцип работы
Меры борьбы с погрешностями
Схемы включения вращающихся трансформаторов
 (1.2)
(1.2) . (1.3)
. (1.3) , (1.4)
, (1.4) , описываемым (1.3).
, описываемым (1.3). 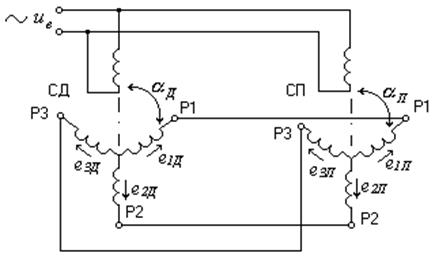
 и
и  . Угол рассогласования индикаторной ССС
. Угол рассогласования индикаторной ССС . (1.5)
. (1.5) , стремящиеся устранить рассогласование a. В идеале
, стремящиеся устранить рассогласование a. В идеале (1.6)
(1.6) - константа.
- константа. (1.7)
(1.7) лежит в пределах (1÷50)·10-4НМ/град.
лежит в пределах (1÷50)·10-4НМ/град. 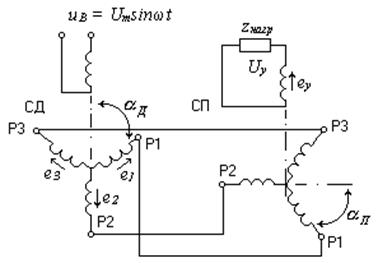
 .
.  (1.8)
(1.8) (1.9)
(1.9) a, град
Рг, г
Мс, Нм
(1.2) . (1.3) , (1.4), описываемым (1.3). и . Угол рассогласования индикаторной ССС . (1.5) , стремящиеся устранить рассогласование a. В идеале (1.6) - константа. (1.7) лежит в пределах (1÷50)·10-4НМ/град. . (1.8) (1.9) Рис.1.4. Обозначения обмоток ВТ
Рис.1.4. Обозначения обмоток ВТ  , изменяющимся в соответствии с (1.3). Ток Iв данной обмотки создает пульсирующий поток возбуждения Фd, направленный по оси данной обмотки (продольной оси d). Если пренебречь падением напряжения на внутреннем сопротивлении обмоток ОВ, напряжение уравновешивается ЭДС
, изменяющимся в соответствии с (1.3). Ток Iв данной обмотки создает пульсирующий поток возбуждения Фd, направленный по оси данной обмотки (продольной оси d). Если пренебречь падением напряжения на внутреннем сопротивлении обмоток ОВ, напряжение уравновешивается ЭДС  , наводимой потоком Фd,
, наводимой потоком Фd,  (1.10)
(1.10) (1.11)
(1.11) . Для ВТ с одной парой полюсов
. Для ВТ с одной парой полюсов , (1.12)
, (1.12) - коэффициент трансформации (wэф2 – эффективное число витков обмотки ротора).
- коэффициент трансформации (wэф2 – эффективное число витков обмотки ротора). и
и  , направленных по осям соответствующих обмоток, - рис.1.5,б. можно представить в виде суммы продольной
, направленных по осям соответствующих обмоток, - рис.1.5,б. можно представить в виде суммы продольной  и поперечной
и поперечной  составляющих. Составляющая компенсируется изменениями тока iS, и результирующий поток Фd в соответствии с (1.10), (1.11) остается неизменным. Составляющая наводит в обмотке ротора дополнительную ЭДС, что приводит к отклонению зависимости напряжения нагрузки
составляющих. Составляющая компенсируется изменениями тока iS, и результирующий поток Фd в соответствии с (1.10), (1.11) остается неизменным. Составляющая наводит в обмотке ротора дополнительную ЭДС, что приводит к отклонению зависимости напряжения нагрузки  от синусоиды, то есть к появлению амплитудной погрешности. Кроме того, возникает и фазовая погрешность – сдвиг фазы выходного напряжения относительно питающего.
от синусоиды, то есть к появлению амплитудной погрешности. Кроме того, возникает и фазовая погрешность – сдвиг фазы выходного напряжения относительно питающего.  . (1.13)
. (1.13) и
и  , поперечные составляющие которых и
, поперечные составляющие которых и  взаимно компенсируются, - рис.1.6,б. наводит в КО ЭДС, под действием которой протекает ток iк, создающий поток
взаимно компенсируются, - рис.1.6,б. наводит в КО ЭДС, под действием которой протекает ток iк, создающий поток  . Данный поток компенсирует (рис.1.7,б), что уменьшает погрешность.
. Данный поток компенсирует (рис.1.7,б), что уменьшает погрешность. 
В ряде случаев одновременно используется первичное и вторичное симметрирование. Схема линейного ВТ с первичным симметрированием приведена на рис.1.8. Для напряжения Uвых на нагрузке zН можно записать
 (1.14)
(1.14) 
 (1.15)
(1.15) (1.16)
(1.16)
 (1.17)
(1.17)  и
и  - выходные сопротивления ВТ; ω – частота питания. > . Для соблюдения условия (1.17) последовательно с каждой обмоткой ротора включают добавочный резистор.
- выходные сопротивления ВТ; ω – частота питания. > . Для соблюдения условия (1.17) последовательно с каждой обмоткой ротора включают добавочный резистор.
3.6 Вращающиеся трансформаторы (вт)
3.7 Сельсины
Схема включения вращающегося трансформатора



Назначение и устройство вращающихся трансформаторов
Ecли BT paбoтaeт в peжимe нeпpepывнoгo вpaщeния poтopa, тo oбычнo пpимeняют «oбpaтнoe» иcпoльзoвaниe oбмoтoк: oбмoтки poтopa иcпoльзyют в кaчecтвe oбмoтoк вoзбyждeнйя и кoмпeнcaциoннoй, a oбмoтки cтaтopa —в кaчecтвe втopичныx· Ecли кoмпeнcaциoннaя oбмoткa зaмыкaeтcя нaкopoткo, тo пpи «oбpaтнoм» иcпoльзoвaнии oбмoтoк нa poтope пpимeняют лишь двa кoнтaктныx кoльцa, чтo yпpoщaeт кoнcтpyкцию, пoвышaeт нaдeжнocть и тoчнocть BТ.
B зaвиcимocти oт гpaфикa фyнкциoнaльнoй зaвиcимocти ЭДC втopичнoй oбмoтки oт yглa пoвopoтa poтopa вpaщaющиecя тpaнcфopмaтopы paздeляют нa cлeдyющиe типы:
cинycнo-кocинycный вpaщaющийcятpaнcфopмaтop (CKBT) — y нeгo вoзникaют нaпpяжeние нa выxoдe oбмoтки, нaxoдящeеcя в cинycнoй зaвиcимocти oт yглa пoвopoтa poтopa a, и нaпpяжeниeнa выxoдe oбмoтки, нaxoдящeecя в кocинycнoй зaвиcимocти oт yглa пoвopoтa poтopa a;
линeйный вpaщaющийcя тpaнcфopмaтop (ЛBT) — y нero выxoднoe нaпpяжeниe нaxoдитcя в пpямoлинeйнoй зaвиcимocти oт yглa;
вpaщaющийcя тpaнcфopмaтop — пocтpoитeль (ПBT) — пpeднaзнaчeн для peшeния гeoмeтpичecкиx зaдaч·
Kpoмe тoгo, вpaщaющиecя тpaнcфopмaтopы мoгyт пpимeнятьcя в кaчecтвe мacштaбныx тpaнcфopмaтopoв (MBT) для coглacoвaния нaпpяжeний oтдeльныx кacкaдoв aвтoмaтичecкoro ycтpoйcтвa, фaзoвpaщaтeлeй, элeктpичecкиx мaшин cинxpoннoй cвязи тpaнcфopмaтopныx cиcтeмax диcтaнциoннoй пepeдaчи yглa.
H
Рис.2
a pиc.2 пoкaзaнo ycтpoйcтвo вpaщaющeгocя тpaнcфopмaтopa, B кopпyce1 pacпoлoжeн шиxтoвaнный сepдeчник cтaтopa 2, в пaзы кoтopoгo yлoжeны pacпpeдeлeнныe oбмoтки 3. B пaзax шиxтoвaннoгo cepдeчникa poтopa 4 тaкжe нaxoдятcя pacпpeдeлeнныe oбмoтки 5 Элeктpичecкий кoнтaкт oбмoтoк poтoµa c вывoдными клeммaми 6 ocyщecтвляeтcя пocpeдcтвoм щeтoк 7 и кoнтaктныx кoлeц 8.studfiles.net
Вращающиеся трансформаторы (поворотные) | мтомд.инфо
Вращающиеся трансформаторы (поворотные) — устройства для плавного регулирования электрического напряжения, выполненное в виде однофазной или, чаще, трёхфазной заторможенной асинхронной машины, в которой изменение напряжения осуществляется поворотом ротора относительно статора.
Это электрические машины переменного тока, предназначенные для преобразования угла поворота q в напряжение, пропорциональное некоторым функциям угла поворота ротора sin(q) или cos(q), а также самому углу q. На статоре ее перпендикулярно размещены две обмотки: C1- C2 и С3- С4.
Их применяют в вычислительной технике для выполнения различных математических операций. С помощью вращающихся трансформаторов решают геометрические задачи, связанные с построением треугольников, преобразованием координат, разложением и построением векторов. В системах автоматического регулирования вращающиеся трансформаторы используют в качестве измерителей расстояния, фиксирующих отклонение системы от некоторого определенного положения.
Схемы включения вращающихся трансформаторов

Рис. 1
Первая получила название главной, а вторая — квадратурной. Обмотки статора выполняются одинаковыми, то есть с одинаковым числом витков. На роторе может быть одна обмотка, но чаще их бывает две. На рисунке приведены схемы включения синусного, косинусного и синусно-косинусного вращающихся трансформаторов соответственно.
Бесконтактный вращающийся трансформатор
Наибольшее распространение получили двухполюсные и многополюсные вращающиеся трансформаторы (ВТ) с двумя обмотками на статоре, смещенными на электрический угол π/2, и такими же обмотками на роторе. Вращающиеся трансформаторы этого типа имеют конструкцию, подобную асинхронному двигателю с двухфазными обмотками на роторе и статоре. Для подведения напряжения к обмоткам ротора используются щетки и контактные кольца, а при ограниченном угле поворота также гибкие проводники. В бесконтактных вращающихся трансформаторах обмотки ротора питаются с помощью двух промежуточных кольцевых трансформаторов (КТ).
Бесконтактный вращающийся трансформатор
Рис. 2: 1 — вращающийся магнитопровод КТ; 2 — вращающаяся обмотка КТ; 3 — неподвижная обмотка КТ; 4 — неподвижный магнитопровод КТ; 5 — обмотка статора ВТ; б — магнитопровод статора ВТ; 7 — магнитопровод ротора ВТ; 8 — обмотка ротора ВТ
Для уменьшения ЭДС, индуцированных высшими гармоническими поля, делают скос пазов ротора на одно зубцовое деление. Большое внимание обращают также на уменьшение погрешностей, связанных с неточностью изготовления: эксцентриситетом поверхностей статора и ротора, обращенных к зазору, асимметрией магнитопровода, неточностью скоса паза. Благодаря всем этим мерам максимальная погрешность воспроизведения функций sin(q) и cos(q) в вращающихся трансформаторах высокого класса точности не превышает 0,01—0,02%.
В многополюсных вращающихся трансформаторах период изменения выходного напряжения соответствует повороту ротора на угол 2к/р и на один оборот ротора приходится р периодов изменения напряжения. Поэтому погрешность воспроизведения выходного напряжения, отнесенная к геометрическому углу поворота ротора, уменьшается в р раз по сравнению с погрешностью, отнесенной к электрическому углу. В многополюсных вращающихся трансформаторах высокой точности число периодов р достигает 60. Обмотки в таких вращающихся трансформаторах выполняются сосредоточенными. Для повышения точности воспроизведения функций sin(q) и cos(q) а выбирается оптимальная ширина зубцов и применяется скос пазов на одно зубцовое деление.
www.mtomd.info
Вращающийся трансформатор - Большая Энциклопедия Нефти и Газа, статья, страница 1
Вращающийся трансформатор
Cтраница 1
Вращающийся трансформатор по устройству подобен асинхронной машине. Почему все-таки его называют трансформатором. [1]
Вращающиеся трансформаторы по конструкции и наличию скользящего контакта подразделяют на контактные и бесконтактные. [2]
Вращающиеся трансформаторы классифицируют по назначению, габаритам, характеру токосъема, параметрам и точности. [3]
Вращающиеся трансформаторы обычно работают в устройствах и приборах высокой точности, где вопрос погрешностей является одним из основных. [4]
Вращающиеся трансформаторы применяются в автоматических счетно-решающих устройствах, предназначенных для различных тригонометрических и геометрических операций. [5]
Вращающиеся трансформаторы широко применяются в системах дистанционной передачи угла высокой точности, в частности в бор-тэвой автоматике, и постепенно вытесняют из этих систем сельсины. [6]
Вращающиеся трансформаторы подобно сельсинам служат для получения выходных напряжений переменного тока, пропорциональных гармоническим функциям угла поворота ротора, а также для построения векторов по его составляющим. [8]
Вращающиеся трансформаторы ( ВТ) обычно рассчитаны на небольшую мощность, порядка нескольких ватт. ВТ имеют большую точность по сравнению с сельсинами и широко применяются в вычислительных устройствах непрерывного действия, а также в следящих системах. [10]
Вращающиеся трансформаторы применяются также для определения ( по значениям напряжений вторичных обмоток) гипотенузы прямоугольного треугольника по заданным его катетам или для определения одного катета по заданным гипотенузе и другому катету. Аналогично находится также значение некоторого вектора по его составляющим и наоборот. Выходные напряжения трансформатора подаются на входные элементы системы автомагического регулирования. [12]
Вращающиеся трансформаторы ( ВТ) - служат для измерения угловых перемещений, являются электрическими машинами переменного тока. [14]
Страницы: 1 2 3 4 5
www.ngpedia.ru









Поделиться с друзьями: