В основном, управление двигателями постоянного тока происходит по 2-х проводной линии (см. раздел "Двигатели постоянного тока. Общие сведения". В случае необходимости смены направления вращения требуется поменять местами провода либо на якоре либо на обмотке возбуждения. Для этого можно использовать различные коммутационные приборы. Однако, в случае удаленного управления двигателями и смене полярности питания изменится полярность и на якоре и на статоре. В итоге двигатель не изменит своего направления вращения. Протягивать отдельные пары для якоря и статора не представляется целесообразным. В таких случаях лучше использовать предлагаемые на рис.1 - 3 двухпроводные схемы удаленного управления.
В таких схемах используется свойство выпрямителя не менять полярность своего напряжения на выходе при смене полярности на его входе. На рис.1 показана схема управления двигателя с параллельным возбуждением. Здесь при смене полярности питания двигателя переключателем SA сменится полярность напряжения на якоре двигателя. А вот обмотка возбуждения Wв сохранит свою полярность питания. С электрической точки зрения разницы нет, что включать в линию подачи питания, а что запитывать с выпрямителя - якорь или обмотку возбуждения. Однако, в цепи обмотки возбуждения течет ток меньший, чем через якорь, да к тому же и при пуске в ней отсутствуют броски пускового тока. Поэтому для такого включения легче подобрать диоды с небольшим током пропуска, чем для якоря.На рис.2 - схема управления двигателя с последовательным возбуждением. Поскольку в таких двигателях обмотка возбуждения включена последовательно с якорем, то нет разницы что включать в диагональ моста - ток везде один и тот же.На рис.3 изображена схема управления двигателя со смешанным возбуждением. Здесь полярность изменяется только на параллельной обмотке возбуждения. Последовательная обмотка с якорем включены в диагональ моста.
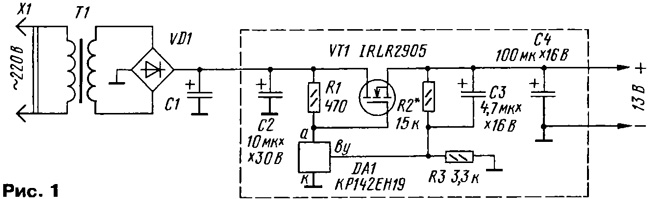
Необходимо помнить, что все приведенные схемы относятся к схемам безреостатного пуска и применяются для двигателей мощностью 0,7...1кВт. У них из-за повышенного сопротивления обмотки якоря значения пусковых токов превышают номинальный в 3...5 раз, что не является опасным для данных схем. Для тех двигателей, чья мощность превышает указанную, включают пускорегулирующее сопротивление(на рис.1 показан пунктиром). Величину пускового тока ограничивают на уровне (1,5..2)*Iном, где Iном - номинальный ток якоря. Величину пускового реостата определяют по формуле: Rп = (U/1.5...2)*Iном - Rа, где U - напряжение источника, Rа - сопротивление источника якоря, включая сопротивление добавочных полюсов и щеток. Эта величина берется либо из справочных данных либо вычисляется по формуле: Rа = U(1 - ηном)/2Iном, где ηном - КПД двигателя. electrochainic.ru Всем привет, наверно многие радиолюбители, также как и я, имеют не одно хобби, а несколько. Помимо конструирования электронных устройств занимаюсь фотографией, съемкой видео на DSLR камеру, и видео монтажом. Мне, как видеографу, был необходим слайдер для видео съемки, и для начала вкратце объясню, что это такое. Ниже на фото показан фабричный слайдер. Слайдер предназначен для видеосъемки на фотоаппараты и видеокамеры. Он являются аналогом рельсовой системы, которая используется в широкоформатном кино. С его помощью создается плавное перемещение камеры вокруг снимаемого объекта. Другим очень сильным эффектом, который можно использовать при работе со слайдером, – это возможность приблизиться или удалиться от объекта съемки. На следующем фото изображен двигатель, который выбрал для изготовления слайдера. В качестве привода слайдера используется двигатель постоянного тока с питанием 12 вольт. В интернете была найдена схема регулятора для двигателя, который перемещает каретку слайдера. На следующем фото индикатор включения на светодиоде, тумблер, управляющий реверсом и выключатель питания. При работе такого устройства важно, чтоб была плавная регулировка скорости, плюс легкое включение реверса двигателя. Скорость вращения вала двигателя, в случае применения нашего регулятора, плавно регулируется вращением ручки переменного резистора на 5 кОм. Возможно, не только я один из пользователей этого сайта увлекаюсь фотографией, и кто-то ещё захочет повторить это устройство, желающие могут скачать в конце статьи архив со схемой и печатной платой регулятора. На следующем рисунке приведена принципиальная схема регулятора для двигателя: Схема очень простая и может быть легко собрана даже начинающими радиолюбителями. Из плюсов сборки этого устройства могу назвать его низкую себестоимость и возможность подогнать под нужные потребности. На рисунке приведена печатная плата регулятора: Но область применения данного регулятора не ограничивается одними слайдерами, его легко можно применить в качестве регулятора оборотов, например бор машинки, самодельного дремеля, с питанием от 12 вольт, либо компьютерного кулера, например, размерами 80 х 80 или 120 х 120 мм. Также мною была разработана схема реверса двигателя, или говоря другими словами, быстрой смены вращения вала в другую сторону. Для этого использовал шестиконтактный тумблер на 2 положения. На следующем рисунке изображена схема его подключения: Средние контакты тумблера, обозначенные (+) и (-) подключают к контактам на плате обозначенным М1.1 и М1.2, полярность не имеет значения. Всем известно, что компьютерные кулеры, при снижении напряжения питания и, соответственно, оборотов, издают в работе намного меньший шум. На следующем фото, транзистор КТ805АМ на радиаторе: В схеме можно использовать почти любой транзистор средней и большой мощности n-p-n структуры. Диод также можно заменить на подходящие по току аналоги, например 1N4001, 1N4007 и другие. Выводы двигателя зашунтированы диодом в обратном включении, это было сделано для защиты транзистора в моменты включения - отключения схемы, так как двигатель у нас нагрузка индуктивная. Также, в схеме предусмотрена индикация включения слайдера на светодиоде, включенном последовательно с резистором. При использовании двигателя большей мощности, чем изображен на фото, транзистор для улучшения охлаждения нужно прикрепить к радиатору. Фото получившейся платы приведено ниже: Плата регулятора была изготовлена методом ЛУТ. Увидеть, что получилось в итоге, можно на видеоролике. В скором времени, как будут приобретены недостающие части, в основном механика, приступлю к сборке устройства в корпусе. Статью прислал Алексей Cитков. Форум Обсудить статью РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ С РЕВЕРСОМ radioskot.ru Для изменения направления вращения машин постоянного тока (реверс) необходимо изменить полярность питающего напряжения. Это можно сделать двумя способами – изменить полярность напряжения на якоре или обмотке возбуждения. В данной статье мы рассмотрим изменение направления вращения с помощью цепи возбуждения. Главным преимуществом реверса по цепи возбуждения – это ее малая мощность даже для машин большой мощности. Мощность данной цепи не превышает нескольких десятков киловатт даже для машин большой мощности. Например, для ДПТ с номинальным током якоря 6000 А и напряжением 1000 В параметры обмотки возбуждения составляют U = 300 B, I = 250 A. Соответственно гораздо выгодней реверсировать такую машину по цепи возбуждения, чем по якорной цепи. Однако при реверсе магнитного потока ухудшатся условия коммутации коллектора. Более того обмотка возбуждения имеет очень большую инерционность, по сравнению с якорной обмоткой. Для электроприводов большой мощности постоянная времени возбуждения может составлять порядка 1 – 3 секунд, а полный реверс при нормальных условиях может быть осуществлен за 10 и более секунд, что существенно влияет на быстродействие всей системы электропривода. Для ускорения процесса реверса осуществляют так называемую форсировку возбуждения. Для этого на обмотку возбуждения подают повышенное напряжение, превышающее номинальное в 2 – 5 раз. Ток при этом нарастает быстрее, чем при номинальном напряжении, и когда он достигает заданного значения, напряжения снижается до уровня номинального. При постоянной времени обмотки возбуждения в 2 секунды и при использовании форсировки можно осуществить реверс за 0,5 секунды. Проведение реверса ДПТ НВ в цепи возбуждения может быть проведен с помощью реверсивного двухкомплектного тиристорного преобразователя (схема 4) или же с помощью контактного реверсора (схема 5). Также для ускорения реверсирования при уменьшения тока до нуля используют инверторный режим работы тиристорного преобразователя. При этом обмотка возбуждения выступает в качестве генератора, отдавая энергию в сеть через инвертор. После снижения тока до нуля его знак изменяется на противоположный. При этом тиристорный преобразователь якорной цепи переходит в рекуперативный режим работы (отдача энергии в сеть), поддерживая при этом заданный тормозной момент. После остановки электродвигатель начинает вращаться в обратную сторону. Процессы, происходящие в электродвигателе постоянного тока показаны ниже: В прямом направлении двигатель будет вращаться без нагрузки в момент времени t1. При этом напряжение будет равно номинальному и подано оно из преобразователя 1, который будет находится в проводящем состоянии. Угол управления при этом будет равен 700. В таком случае UB = UBmaxcos700 = 0.34Umax. Umax – максимальное напряжение преобразователя при угле управления равном нулю. В момент t2 начнется реверс. С начала напряжение силового канала снижается до нуля Uя = 0. При U<Eя в якорной цепи перестанет протекать ток, после чего угол преобразователя 1 изменится с 700 до 1700. Он перейдет в режим инвертора с напряжением случае UB = UBmaxcos1700 = — 0.98Umax. Данное напряжение практически в 3 раза превысит номинальное, чем обеспечится форсирование скорости нарастания тока. Ея снижается вместе с током возбуждения. В момент t3 IВ и ЭДС якоря Ея будут равны нулю. В этот же момент времени блокируется подача импульсов управления на первый преобразователь (1) и до момента t4 обеспечивается пауза длительностью 10 – 20 мс, характерная для электроприводов с раздельным управлением. В момент времени t4 начинается подача импульсов управления на преобразователь 2, который обеспечивает форсировку тока возбуждения. Его угол управления равен примерно 100, что соответствует UB = -UBmaxcos100 = -0.98Umax. С момента t4 начинается торможения машины постоянного тока с отдачей энергии в сеть при заданном токе якоре. В t5 Iв достигает своего максимального отрицательного значения и угол управления преобразователя 2 снижается до 700, обеспечивая при этом номинальное напряжение и ток обмотки возбуждения. В момент времени t6 скорость электродвигателя равна нулю. С этого момента он начинает свой разгон в обратном направлении вращения. В момент t7 скорость вращения вала достигает номинальной, а в момент t8 происходит наброс нагрузки. Система управления электроприводом собранная по схеме 5, точно также как и собранная по схеме 4, несмотря на используемую форсировку напряжения, имеют быстродействие значительно ниже, чем при использовании схемы реверса по якорной цепи. Хотя стоит отметить, что общее время реверса электропривода во многом зависит от механической инерционности всей системы в целом. elenergi.ru Моторы, работающие на постоянном токе редко встречаются в домашнем хозяйстве. Но они всегда стоят во всех детских игрушках, работающих от батареек, которые ходят, бегают, ездят, летают и т. Преимущества ДПТ по сравнению с асинхронными моторами: Недостатки ДПТ: Далее Я постараюсь кратко и доступно в одной статье изложить схемы, принципы работы, регулировки и реверса двигателей постоянного тока. Устройство двигателя аналогично синхронным двигателям переменного тока. Повторяться не буду, если не знаете, тогда смотрите в этой нашей статье. Любой современный электромотор работает на основе закона магнитной индукции Фарадея и «Правила левой руки». Нижняя часть будет выталкиваться вправо, а верхняя – влево, поэтому якорь начнет вращаться до момента пока части якоря не поменяются местами. Для создания непрерывного вращения необходимо постоянно менять местами полярность обмотки якоря. Чем и занимается коллектор, который при вращении коммутирует обмотки якоря. Если двигатели переменного тока довольно просто подключаются, то с ДПТ все сложнее. Вам необходимо знать марку мотора, и затем в интернете узнавайте про его схему включения. Чаще всего у средних и мощных моторов постоянного тока есть в клеммной коробке отдельные выводы от якоря и от обмотки возбуждения (ОВ). Как правило, на якорь подаётся полное напряжение электропитания, а на обмотку возбуждения -регулируемый ток реостатом или переменным напряжением. От величины тока ОВ и будут зависеть обороты ДПТ. Чем он выше, тем быстрее скорость вращения. В зависимости от того как подключен якорь и ОВ, электродвигатели бывают с независимым возбуждением от отдельного источника тока и с самовозбуждением, которое может быть параллельным, последовательным и смешанным. На производстве применяются двигатели с независимым возбуждением ОВ, которая подключается к отдельному от якоря источнику питания. Схема подключения с параллельным возбуждением по своей сущности аналогична схеме с независимым возбуждением ОВ. С той лишь разницей, что отпадает необходимость в использовании отдельного источника питания. Моторы с последовательным возбуждением применяются, когда необходим большой пусковой ток, мягкая характеристика. Они применяются а трамваях, троллейбусах и электровозах. По этой схеме обмотки возбуждения и якоря подключаются между собой последовательно. Иногда применяются ДПТ со смешанным возбуждением, при котором одна обмотка ОВ соединяется последовательно якорной цепи, а другая параллельно. Что бы изменить направление вращение ДПТ с последовательным возбуждением необходимо поменять направления тока в ОВ или обмотке якоря. Практически, это делается изменением полярности: меняем плюс с минусом местами. Если же поменять одновременно полярность в цепях возбуждения и якоря, тогда направление вращения не изменится. Аналогично делается реверс и для моторов, работающих на переменном токе. Реверсирование ДПТ с параллельным или смешанным возбуждением лучше производить изменением направления электрического тока в обмотке якоря. При разрыве обмотки возбуждения, ЭДС достигает опасных величин и возможен пробой изоляции проводов. ДПТ с последовательным возбуждением проще всего регулировать переменным сопротивлением в цепи якоря. Регулировать можно только на уменьшение числа оборотов в соотношении 2:1 или 3:1. При этом происходят большие потери в регулировочном реостате (R рег). Данный метод используется в кранах и электрических тележках, у которых бывают частые перерывы в работе. ДПТ с параллельным возбуждением так же можно регулировать частоту оборотов вниз при помощи сопротивления в цепи якоря, но не более 50 процентов от номинала. Опять же будет нагрев сопротивления из-за потерь электрической энергии в нем. Увеличить же обороты максимум в 4 раза позволяет реостат в цепи ОВ. Самый простой и распространенный метод регулировки частоты вращения. На практике в современных электромоторах данные методы регулировки из-за своих недостатков и ограниченности диапазона регулирования редко применяются. Используются различные электронные схемы управления. olimp23.com Cтраница 1 Направления вращения двигателей постоянного тока регулируются изменением направления тока либо только в якоре, либо только в обмотке возбуждения. Одновременное изменение направления тока в якоре и обмотке возбуждения не приводит к реверсированию двигателя. [1] Чтобы изменить направление вращения двигателя постоянного тока, следует изменить направление тока в обмотке якоря или в обмотке индуктора. [2] Для изменения направления вращения двигателя постоянного тока необходимо изменить направление тока либо только в якоре, либо только в обмотке возбуждения. [3] Для изменения направления вращения двигателя постоянного тока необходимо изменить направление тока либо только в якоре, либо только в. [4] Для изменения направления вращения двигателя постоянного тока необходимо изменить направление силы, действующей на проводники якоря в магнитном поле. [5] Для изменения направления вращения двигателя постоянного тока необходимо изменить направление тока либо только в якоре, либо только в обмотке возбуждения. [6] Для остановки двигателя снимают нагрузку, затем в цепи параллельной обмотки возбуждения выводят реостат, что приводит к увеличению тока возбуждения, возрастанию магнитного потока и снижению скорости вращения; затем вводят пусковой реостат и, наконец, при помощи разъединителя или автомата отключают двигатель от сети. Чтобы изменить направление вращения двигателя постоянного тока, нужно изменить направление тока либо только в обмотке якоря, либо только в обмотке возбуждения. [7] Для изменения направления вращения двигателя постоянного тока, имеющего смешанное возбуждение, необходимо изменить направление тока в обмотках якоря и дополнительных полюсов или изменить направление тока как в параллельной, так и в последовательной обмотках возбуждения. [9] Серводвигатели могут иметь разное исполнение, но, как правило, все они обладают реверсивными свойствами. Известно, что изменение направления вращения двигателя постоянного тока осуществляется либо за счет изменения направления тока, проходящего через якорь, либо за счет изменения направления потока возбуждения. В серводвигателях сериесного типа ( рис. 6.12) для осуществления реверсирования предусматривают две обмотки возбуждения ОВ1 и 052 и в зависимости от того, какая из них задействована, двигатель вращается в ту или другую сторону. Обычно такой двигатель управляется релейным элементом в виде, например, перекидного контакта / С. [11] Известно, что для изменения направления вращения двигателя постоянного тока надо изменить направление тока в якоре или в обмотке возбуждения. В данном случае принято изменять направление тока в якоре, что значительно легче ввиду меньшей индуктивности этой обмотки, и поэтому при переключении этой цепи не возникает больших перенапряжений. [12] Реверсивными называют преобразователи, позволяющие изменять полярность постоянного напряжения на нагрузке. Реверсивные преобразователи используются главным образом в электроприводе для изменения направления вращения двигателей постоянного тока. [14] Реверсивными называются преобразователи, позволяющие изменять полярность постоянного напряжения и тока в нагрузке. Реверсивные преобразователи используются, главным образом, в электроприводе для изменения направления вращения двигателей постоянного тока. [15] Страницы: 1 www.ngpedia.ru Электромагнитный момент Если изменить направление тока в якоре, то сила действующая на проводник с током изменит направление, а, следовательно, изменится и направление вращения рис. 42. К такому же результату приведет изменение полюсов (изменение направления тока обмотки возбуждения). Таким образом, для реверсирования необходимо либо изменить направление тока в якоре, либо изменить направление тока в обмотке возбуждения (изменить полюса). Если на входе двигателя изменить + на - , то потоки ток якоряизменят направление, а момент останется тем же как и направление вращения. Двигатели постоянного тока классифицируются в зависимости от способа соединения обмотки возбуждения с якорем: 1. Двигатель параллельного возбуждения (если напряжение обмотки возбуждения иное, то такой двигатель называется двигателем независимого возбуждения). 2. Двигатель последовательного возбуждения. 3. Двигатель смешанного возбуждения. Двигатели параллельного возбуждения 1.Скоростная характеристика, зависимость , , Скоростная характеристика при называется естественной, рис. 44. Если , то характеристика называется реостатной. Так как сопротивление якоря , как правило мало, то с увеличением тока якоря падение напряжения в якорной цепи мало и скорость уменьшается незначительно. Поэтому, естественная характеристика двигателя получается жесткой. 2.Моментная характеристика, зависимость ,. На рис. 44. Представлена моментная характеристика, где 3.Механическая характеристика, зависимость скорости от момента,. , определим ток якоря через момент,, откуда, это выражение подставим в исходное уравнение, получим механическую характеристику:,. Механические характеристики при разных сопротивленияхпредставлены на рис. 45, где, т. е. механическая характеристика притакже жесткая. Это определяет область использования этих двигателей (трансмиссии, вентиляторы, системы ГД для привода станков). Условия устойчивой работы агрегата Установившийся процесс, когда ,,, Если ,,. Если ,,. условием устойчивой работы агрегата является:, точкабудет соответствовать устойчивой работе агрегата. 4. Рабочие характеристики, это зависимость . Рабочие характеристики двигателя – это зависимость потребляемой мощности , тока, кпд, скорости и момента от мощности на валу. Двигатели последовательного возбуждения Обмотка возбуждения двигателя включена последовательно с якорем, рис. 45. Ток якоря равен току возбуждения. Поэтому обмотка возбуждения имеет большое сечение и малое число витков. Последовательное соединение обмотки возбуждения является отличительной особенностью этого двигателя и влияет на вид характеристик. С увеличением тока якоря, увеличивается поток, скорость двигателя резко падает, т. е. получается мягкая скоростная характеристика, рис. 46. 1.Скоростная характеристика,. В общем виде, за счет насыщения, не имеет решение, аналитическое выражение скоростной характеристики можно получить только для ненасыщенной машины, когда, рис. 46. Момент, при,, т. е. если ток нагрузки возрастает в 2 раза, то момент в 4 раза. Это условие и определяет область применения этих двигателей, т. е. используются там, где при пуске нужен большой пусковой момент (тяговый привод). Скоростная характеристика при, запишется:. 2. Моментная характеристика, ,, при,, рис. 46. 3. Механическая характеристика, . Аналитическое выражение характеристики может быть записано при условии. , ,, если подставить токв исходное уравнение, получим:,, где. Общий вид механических характеристик представлен на рис. 47. Двигатель последовательного возбуждения пойдет на разнос при работе его в холостую. Это может привести к механическим поломкам двигателя. Поэтому, минимальный ток двигателя должен быть не менее . 3. Двигатель смешанного возбуждения Принципиальная схема включения двигателя представлена на рис. 48. В зависимости от того, какая из обмоток преобладает по потоку, двигатели подразделяются на две разновидности: 1)Двигатель параллельного возбуждения с добавочной, последовательной обмоткой. Характеристики такого двигателя приближаются к двигателю параллельного возбуждения, рис. 49. Характеристика (1), естественная. Характеристика (2) соответствует встречному включению потоков , при согласном включении,получаем характеристику (3). 2)Двигатель последовательного возбуждения с добавочной параллельной обмоткой. Характеристики такого двигателя приближаются к характеристикам двигателя последовательного возбуждения. Характеристика 4 - характеристика двигателя последовательного возбуждения, характеристика 5 - характеристика двигателя смешанного возбуждения, при этом, обмотки включаются только согласно. Такая характеристика имеет скорость идеального холостого хода и двигатель не пойдет в разнос при холостом ходе. У такого двигателя частота вращения и момент зависят от двух потоков. , . При согласном включении обмоток, при том же токе якоря, можно получить повышенный момент. Такой двигатель используется для тяговых установок и там, где имеются резкие изменения нагрузки. studfiles.net В основном, управление двигателями постоянного тока происходит по 2-х проводной линии. В случае необходимости смены направления вращения требуется поменять местами провода либо на якоре либо на обмотке возбуждения. Для этого можно использовать различные коммутационные приборы. Однако, в случае удаленного управления двигателями и смене полярности питания изменится полярность и на якоре и на статоре. В итоге двигатель не изменит своего направления вращения. Протягивать отдельные пары для якоря и статора не представляется целесообразным. В таких случаях лучше использовать предлагаемые на рис.1 - 3 двухпроводные схемы удаленного управления. В таких схемах используется свойство выпрямителя не менять полярность своего напряжения на выходе при смене полярности на его входе. На рис.1 показана схема управления двигателя с параллельным возбуждением. Здесь при смене полярности питания двигателя переключателем SA сменится полярность напряжения на якоре двигателя. А вот обмотка возбуждения Wв сохранит свою полярность питания. С электрической точки зрения разницы нет, что включать в линию подачи питания, а что запитывать с выпрямителя - якорь или обмотку возбуждения. Однако, в цепи обмотки возбуждения течет ток меньший, чем через якорь, да к тому же и при пуске в ней отсутствуют броски пускового тока. Поэтому для такого включения легче подобрать диоды с небольшим током пропуска, чем для якоря. На рис.2 - схема управления двигателя с последовательным возбуждением. Поскольку в таких двигателях обмотка возбуждения включена последовательно с якорем, то нет разницы что включать в диагональ моста - ток везде один и тот же. На рис.3 изображена схема управления двигателя со смешанным возбуждением. Здесь полярность изменяется только на параллельной обмотке возбуждения. Последовательная обмотка с якорем включены в диагональ моста. Необходимо помнить, что все приведенные схемы относятся к схемам безреостатного пуска и применяются для двигателей мощностью 0,7...1кВт. У них из-за повышенного сопротивления обмотки якоря значения пусковых токов превышают номинальный в 3...5 раз, что не является опасным для данных схем. Для тех двигателей, чья мощность превышает указанную, включают пускорегулирующее сопротивление(на рис.1 показан пунктиром). Величину пускового тока ограничивают на уровне (1,5..2)*Iном, где Iном - номинальный ток якоря. Величину пускового реостата определяют по формуле: Rп = (U/1.5...2)*Iном - Rа, где U - напряжение источника, Rа - сопротивление источника якоря, включая сопротивление добавочных полюсов и щеток. Эта величина берется либо из справочных данных либо вычисляется по формуле: Rа = U(1 - ηном)/2Iном, где ηном - КПД двигателя. На рис.4 показана схема реверсирования универсального коллектороного двигателя. Эти двигатели могут работать как от постоянного напряжения, так и от сети однофазного переменного тока. Изготавливаются машины, как правило, с последовательным возбуждением, хотя есть модели и с параллельным. Конструктивно двигатель представляет машину коллекторного типа. При работе от сети постоянного тока в цепь якоря включается вся обмотка, а при питании переменным током только часть ее из-за появления индуктивного сопротивления обмотки возбуждения и якоря. Из-за "сложности" выполнения обмотки возбуждения при двухпроводном подключении к сети наиболее простым способом реверсирования будет включение обмотки якоря в диагональ молста по постоянному току. В результате изменения полярности подачи питания полярность изменится только на обмотках возбуждения, что и приведет к реверсированию. megalektsii.ruРеверсирование электродвигателей постоянного тока. Схема реверс двигателя постоянного тока
реверсирование двигателей
РЕГУЛЯТОР ОБОРОТОВ ДВИГАТЕЛЯ С РЕВЕРСОМ



Схема регулятора






Видео работы
Реверс по цепи возбуждения машин постоянного тока независимого возбуждения

Работа и схемы электродвигателей постоянного тока
Принцип действия электродвигателя постоянного тока
 Если к нижней части обмотки якоря подключить электрический ток в одном направлении, а к верхней- в обратном- он начнет вращаться. Согласно правилу левой руки, проводники, уложенные в пазах якоря, будут выталкиваться магнитным полем обмоток корпуса ДПТ или статора.
Если к нижней части обмотки якоря подключить электрический ток в одном направлении, а к верхней- в обратном- он начнет вращаться. Согласно правилу левой руки, проводники, уложенные в пазах якоря, будут выталкиваться магнитным полем обмоток корпуса ДПТ или статора. Напряжение от источника тока подается на коллектор при помощи пары прижимных графитовых щеток.
Напряжение от источника тока подается на коллектор при помощи пары прижимных графитовых щеток.Принципиальные схемы электродвигателя постоянного тока
 Между обмотками возбуждения и якоря нет электрической связи.
Между обмотками возбуждения и якоря нет электрической связи. Двигатели при включении по обоим этим схема обладают одинаковыми жесткими характеристиками, поэтому применяются в станках, вентиляторах и т. п.
Двигатели при включении по обоим этим схема обладают одинаковыми жесткими характеристиками, поэтому применяются в станках, вентиляторах и т. п. При подаче напряжения токи в обоих обмотках будут одинаковы. Главный недостаток заключается в том, что при уменьшении нагрузки на вал меньше 25% от номинала, происходит резкое увеличение частоты вращения, достигающее опасных для ДПТ значений. Поэтому для безотказной работы необходима постоянная нагрузка на вал.
При подаче напряжения токи в обоих обмотках будут одинаковы. Главный недостаток заключается в том, что при уменьшении нагрузки на вал меньше 25% от номинала, происходит резкое увеличение частоты вращения, достигающее опасных для ДПТ значений. Поэтому для безотказной работы необходима постоянная нагрузка на вал. В жизни редко встречается.
В жизни редко встречается.Реверсирование двигателей постоянного тока
Регулирование оборотов двигателей постоянного тока
 В других случаях используется регулировка оборотов вверх от номинала при помощи реостата в цепи обмотки возбуждения, как показано на правом рисунке.
В других случаях используется регулировка оборотов вверх от номинала при помощи реостата в цепи обмотки возбуждения, как показано на правом рисунке.Направление - вращение - двигатель - постоянный ток
Направление - вращение - двигатель - постоянный ток
3.6.3. Реверсирование двигателя постоянного тока
3.6.4. Классификация двигателей постоянного тока
Принципиальная схема включения двигателя параллельного возбуждения представлена на рис. 43. Для пуска используется пусковой реостат (п. Р.). Свойства двигателя определяются его характеристиками.
Основное уравнение движения электропривода .
Реверсирование электродвигателей постоянного тока. — МегаЛекции

интернет-магазин светодиодного освещения
Пн - Вс с 10:30 до 20:00
Санкт-Петербург, просп. Энгельса, 138, корп. 1, тк ''Стройдвор''







Поделиться с друзьями: