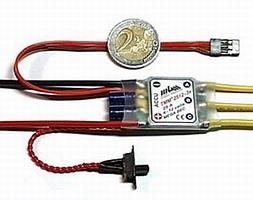
Меня заинтересовали вопросы управления различными двигателями ( асинхронными, коллекторными, постоянного и переменного тока и т.д. ) и различные варианты этого управления. Для начала я остановился на коллекторных двигателях от стиральных машин, потому что их очень много и они достаточно дёшевы. А также наличие целой серии специализированных микросхем предназначенных для этой цели. Самая популярная из них – это микросхема TDA1085. Об этой микросхеме полно исчерпывающей информации – например здесь TDA1085. Если задать поиск “TDA1085” - то Google выдаст огромное количество информации и огромное количество практических схем. Самое подробное и полное описание регулятора на TDA1085 , о том как его изготовить и как настроить представил Александр Шенрок в своих видео. На основе собранных данных я изготовил три разных платы на симисторах BTA41, BTA24 и BTA16. Все эти платы прошли испытания и вполне работоспособны. Свои принципиальные схемы я размещу в следующем сообщении. Можно скачать первые варианты самодельные - здесь ссылка на первые печатные платы, которые на фото - Первые печатки Там нет обозначений и подключение по 5 и 6 ноге надо привести в соответствие со схемами http://www.motor-r.info/p/blog-page_4.html Когда я начинал делать - схема была немного другой. Купить микросхемы TDA1085 можно здесь. Купить симисторы BTA41 можно здесь. www.motor-r.info www.parkflyer.ru Данная статья посвящена практическим аспектам применения регуляторов хода (далее - контроллеров) для бесколлекторных моторов, и особенностям их эксплуатации. Бесколлекторные моторы, и соответственно регуляторы хода для них можно разделить на 2 основных класса - с датчиками положения ротора и без них. Бездатчиковые проще в изготовлении, поэтому большинство моторов и контроллеров в настоящее время именно такие (кроме специальных автомодельных). Далее речь пойдет именно о бездатчиковых регуляторах хода. Большинство применяемых в моделизме бесколлекторных моторов построены по принципу "вывернутого наизнанку" коллекторного двигателя: статор с обмотками неподвижен, а ротор с постоянными магнитами вращается. Количество обмоток – всегда три. Среди бесколлекторных моторов для моделизма можно выделить две основные группы - с внутренним ротором, где постоянный магнит вращается внутри обмоток, и с внешним ротором (outrunner). Последние имеют, как правило, большее количество магнитных полюсов, и больший крутящий момент по сравнению с моторами с внутренним ротором, что позволяет применять их на авиамоделях без использования редуктора - они могут «напрямую» крутить винты большого диаметра. Максимальный постоянный (сontinius) ток – указывает, какой ток контроллер способен держать продолжительное время. Как правило, этот параметр входит в обозначение контроллера (например Jes -18, Phoenix -10). Иногда указывают величину "кратковременного" тока, допустимого в течении нескольких секунд. "Кратковременный" ток способны держать выходные транзисторы контроллера, но рассеивать выделяемое при этом токе количество тепла контроллер не в состоянии. Максимальное рабочее напряжение - указывается, с каким количеством NiCd или литий-полимерных банок можно использовать контроллер. Для контроллеров с ВЕС-ом, эта величина может быть разная, в зависимости от количества сервомашинок. Это связано с рассеиванием тепла стабилизатором схемы ВЕС - при большем числе банок максимальный ток нагрузки BEC и, следовательно, количество сервомашинок меньше. Как правило, если используется ВЕС, количество банок не превышает 12. Если вы хотите работать с большим количеством банок, то придется ставить или отдельную батарею питания приемника, или использовать внешний ВЕС. Но в любом случае нельзя превышать максимальное напряжение, допустимое для контроллера. Максимальные обороты (maximum rpm) - программное ограничение максимальных оборотов. Всегда указывается для двухполюсного двигателя. Для многополюсных моторов это число надо разделить на количество пар полюсов. Например, если указано 63000 rpm, то для мотора с 12-ю магнитами максимальные обороты будут 63000/6=10500 rpm, а это уже не так много... Данная функция не дает мотору набрать большее, чем указано количество оборотов, некоторые контроллеры при превышении этого значения на холостом ходу начинают сбоить, вызывая значительные броски тока - мотор начинает резко дергаться. Этот эффект не является признаком неисправности мотора ли контроллера. Внутреннее сопротивление – полное сопротивление силовых ключей контроллера, без учета проводов. Чем мощнее контроллер, тем меньше его внутреннее сопротивление. Как правило, сопротивление проводов сравнимо с внутренним сопротивлением контроллера и вносит до 30% потерь. Для примера, внутреннее сопротивление контроллера Castle Creations Phoenix-25 13 mOhm, а сопротивление 30 см провода сечением 1кв.мм – 6 mOhm, то есть почти треть потерь приходится на провода. Частота импульсов контроллера (PWM Frequency) - как правило, составляет 7-8 Кгц. У "продвинутых" контроллеров частоту регулирования можно программировать на другие значения- 16 и 32 Кгц. Эти значения применяется в основном для высокооборотных 3-4-х витковых моторов с малой индуктивностью, при этом улучшается линейность регулирования частоты вращения. Провода - не такое простое дело, как может показаться на первый взгляд. Есть несколько важных аспектов. Самое главное - нельзя делать провода от контроллера до аккумулятора большой длины! Дело в том, что стартовые токи беколлекторных моторов намного больше, чем аналогичных коллекторных, и при работе моторов возникают большие броски тока. Конденсаторы, всегда стоящие на входе контроллера, должны быть специального типа, но многие производители ставят обычные. При удлинении проводов от контроллера до батареи начинает сказываться их индуктивность, и может возникнуть ситуация, когда уровень помех по напряжению питания на входе контроллера станет настолько высок, что контроллер не сможет правильно определить положение ротора мотора (иногда при этом еще и "повисает" процессор контроллера). Известно несколько случаев полного "выгорания в дым" контроллеров, при удлинении проводов со стороны аккумулятора до 30см. Если необходимо увеличить длину проводов (например, двигатель стоит в хвосте модели), то надо увеличивать длину проводов от мотора до контроллера. Как правило, контроллеры поставляются с проводами до батареи длиной 13-16см. Такая длина вполне достаточна для надежной работы контроллера, и не следует ее увеличивать более чем на 5см. Кроме того, длинные провода до батареи могут вызывать проблемы при резком старте мотора - контроллер может не перейти от режима старта к рабочему режиму при слишком резком прибавлении “газа”. Для предотвращения этого эффекта во многих контроллерах есть специальные настройки. Практически все современные контроллеры имеют множество программных настроек. От них зависит режим работы, надежность, а иногда и работоспособность контроллера в паре с тем или иным мотором. Здесь мы попробуем перечислить основные настройки, и объяснить, как и на что они влияют. Напряжение выключения мотора (cut-off voltage) – при каком минимальном напряжении на батарее мотор будет выключен. Эта функция предназначена для сохранения работоспособности аппаратуры при разряде батареи и для защиты самой батареи от переразряда (последнее особенно важно для литий- полимерных аккумуляторов). На некоторых контроллерах (например, Jeti серии “ Advansed ”) нет установки напряжения на конкретное число банок в случае использования литиевых батарей, количество банок при этом определяется автоматически. Тип выключения мотора (cut-off voltage) – как правило имеет 2 значения - плавный (soft cut-off) и жесткий (hard cut-off). При плавном выключении мотора контроллер сбрасывает обороты постепенно, не позволяя напряжению на батарее упасть ниже заданного, при этом контроль над моделью сохраняется до последнего. При жестком - мотор немедленно останавливается если зафиксированно падение напряжения ниже заданного. Жесткое отключение может доставить некоторые неудобства при разряженном аккумуляторе: манипулируя газом, вместо небольшой прибавки оборотов иногда получается полный останов мотора. Тормоз (brake) – торможение мотора после установки газа в "ноль". Может иметь значения включен/выключен, на некоторых контроллерах есть еще программируемая величина тормоза 50-100% и задержка включения тормоза после полного сброса газа. Это необходимо для защиты шестеренок редуктора в случае использования больших и тяжелых пропеллеров. В некоторых контроллерах, например том же Jeti серии "Advanced" тормоз и плавное выключения мотора – установки взаимоисключающие – для включения плавного отключения мотора надо выключить тормоз и наоборот... Намудрили чехи, однако. Опережение (Timing) – параметр, от которого зависит мощность и КПД двигателя. Может находится в пределах от 0° до 30°. Физически это электрический угол опережения коммутации обмоток. Для двухполюсных моторов при увеличении опережения обороты и мощность на максимальных оборотах растут, а общий КПД падает. Для двух и 4-х полюсных моторов с внутренним ротором рекомендуют значения от 5 до 15 градусов. При больших значениях опережения мощность практически не растет, а КПД падает на 3-5% - это важно для соревнований, где счет идет именно на эти проценты. Для многополюсных моторов с внешним ротором ситуация иная - для них оптимальным по КПД и мощности является опережение 25-30°. При изменении угла опережения от 5 до 25° растут и КПД и выходная мощность. Однако прирост этот невелик - около 3%. Как говорится - в полете не заметно, но осознавать приятно... Режим старта (start mode) - не имеет как правило каких-то числовых значений, описывается только как мягкий, (soft) жесткий (hard), быстрый (fast) и пр. Быстрый старт рекомендуется для моторов без редукторов и для использования в соревнованиях. При использовании быстрого старта в моторах с редукторами возможно повреждение шестерен. Плавный старт обеспечивает меньшие пусковые токи в момент старта и позволяет избежать возможных перегрузок по току контроллера, но время раскрутки мотора до полных оборотов увеличивается. Время акселерации или задержка акселерации (acseleleration time или acseleration delay) – устанавливает время набора оборотов после старта до максимума. Устанавливается меньше для моторов с легкими пропеллерами без редукторов и больше для моторов с редукторами и в случае срабатывания защиты по току при резком прибавлении газа. Ограничение тока (Curent limiting) – уровень срабатывания защиты по току. Устанавливается более чувствительным в случае применения моторов с большим стартовым током и батарей с высоким внутренним сопротивлением. При этом желательно установить плавное отключение мотора, в противном случае при резких манипуляциях газом мотор будет останавливаться. Не рекомендуется отключать защиту по току, если вы не уверены ,что ток мотора не может превысить максимально допустимое значение для контроллера. Это может привести к повреждению контроллера большими стартовыми токами. Режим газа (throttle type или throttle mode) – устанавливает зависимость оборотов мотора от ручки газа. Может иметь значения автокалибровки ( auto calibrating ) – при этом контроллер самостоятельно определяет положение малого и полного газа, а также фиксированный ( fixed ) - когда характеристика задана производителем. Также в некоторых контроллерах присутствует режим "гувернер" (governor), он предназначен для вертолетов, когда положению ручки газа соответствуют определенные обороты, а не мощность двигателя, контроллер в данном режиме работает как автоматическая система поддержания оборотов, прибавляя мощность при увеличении нагрузки на двигатель. Реверс (reverse) - смена направления вращения. Обычно для изменения направления вращения двигателя надо поменять местами любые два провода от мотора. Но в продвинутых контроллерах, возможно изменить направление вращения мотора программно. В некоторых контроллерах, например в Kontronik серии "Beat", нет отдельных настроек параметров, но есть выбор комплексных режимов – планер, самолет, корабль, вертолет и даже автомобиль с задним ходом! Тут совет один - читайте внимательно инструкцию. Как правило, вход в режим программирования делается таким образом, что при нормальном использовании включить его очень затруднительно. В некоторых контроллерах для программирования есть специальные перемычки (джамперы), а создатели Castle Creations предусмотрели кроме обычного (с передатчика), программирование через компьютер, с помощью специального USB адаптера, подключаемого к контроллеру через разъем для приемника - просто и гораздо удобней, чем считать вспышки светодиода или писки мотора... Из нюансов следует отметить, что у некоторых контроллеров, например ТММ, процедуру программирования следует провести до конца - все параметры записываются в конце цикла программирования, а у других - например Castle Creations - программирование можно закончить в любой момент. Как показывает практика - 70% проблем при использовании контроллеров связано со стартом двигателей. Если мотор у вас плохо стартует, то есть начинает вращаться, а потом останавливается - большинство причин кроется в больших бросках тока и как следствие, провалах питающего напряжения. В первую очередь проверьте провода до батареи. Пробную проверку лучше производить на той длине проводов, которые даны изготовителем, или короче. Далее - попробуйте снять нагрузку с мотора и проверить его на холостом ходу. Если на хостом ходу все в порядке, а при установке пропеллера мотор упорно не желает крутится, только дергается в одном направлении, попробуйте поставить мягкий старт или увеличить время акселерации. Также здесь поможет установка плавного выключения мотора. Контроллеры, у которых есть ограничение тока, всегда имеют индикацию этого режима - опять же читайте инструкцию, чтобы установить, произошло срабатывание токовой защиты или нет... Старые "золотые" Jeti серия Jes 18, отличаются, например одной особенностью - у них нет плавного выключения, и при попытке работы мотора с большими пусковыми токами от старых аккумуляторов, при резком движении ручкой газа мотор останавливается, если напряжение упало до 5.2 вольта. Это не неисправность контроллеров, это у них такой алгоритм выключения мотора: напряжение упало - мотор остановился... Иногда бывает, что мотор стартует в другую сторону, набирает примерно 20-30% оборотов, потом "одумывается", и резко начинает крутится в нужном направлении. Останов и реверс сопровождаются резким броском тока, иногда срабатывает токовая защита. Данная ситуация происходит только с 2-3х витковыми двухполюсными спортивными моторами при наличии резкого старта. Причем мотор ведет так себя не всегда, примерно в 10% случаев. Выход из этой ситуации - опять же использование плавного старта. Наличие выключателя в контроллере - это дополнительное удобство, позволяющее не залезать каждый раз вовнутрь модели, чтобы включить или выключить аппаратуру. Некоторые производители контроллеров не ставят выключателей на контроллеры предназначенные для токов ниже 40А, таковы например Castle Creations и Astro Flight. Привлекает решение проблемы выключателей у контроллеров ТММ. У них каждая модель имеет версию с выключателем и без. Причем выключатель электронный, работает на размыкание, и если он в полете случайно оторвется (что вообще-то трудно себе представить) то контроллер и аппаратура останется включенной. Если контроллер ТММ забыть выключить, он при отсутствии сигнала с приемника начнет попискивать мотором. Подобная функция есть и у Astro Flight. Про "выключатель" у контроллеров Jeti уже упоминалось в статье про литий- полимерные аккумуляторы, он выключает лишь питание приемника, контроллер при этом всегда включен. И не подает никаких сигналов об этом постепенно разряжая "в ноль" батарею, что для литиевых аккумуляторов заканчивается фатально. Лидером в производстве профессиональных контроллеров для спортсменов является, конечно же Schulze Electronik – на этих контроллерах летает, плавает и ездит большинство спортсменов. Однако это и самые дорогие контроллеры. Далее в списке популярности стоит Castle Creations – сравнительно молодая фирма (основана в 1997г), специализирующаяся исключительно на выпуске регуляторов хода. В Америке она является лидером по количеству продаж. Также профессиональные, но опять-таки довольно дорогие контроллеры для спортсменов делает немецкая фирма Kontronik. Продукция чешских фирм MGM Compro (это их контроллеры называются TMM) и Jeti Models (они же делают контроллеры для фирмы Hacker motors) ориентирована в основном на рынок хобби. Американская фирма Astro Flight, специализирующаяся на выпуске электромоторов для моделизма, также делает контроллеры к своим моторам, однако отдельно от моторов найти их в продаже проблемматично... При выборе контроллера главный совет - внимательно изучите все характеристики приглянувшейся вам модели. У некоторых фирм, например Jeti models и MGM Compro (TMM), контроллеры на один и тот же ток и напряжение могут быть с разными версиями программного обеспечения и иметь разное число настроек. Если вы планируете использовать литий-полимерные аккумуляторы - контроллер должен иметь соответствующие настройки. При больших токах 60-80А контроллер лучше выбирать с запасом на 10-15А больше. Цена любой вещи зависит от масштабов ее производства. Производители бесколлекторных моторов множатся, как грибы после дождя. Поэтому хочется верить, что в скором будущем цена на контроллеры и бесколлекторные двигатели упадет, как упала она на аппаратуру радиоуправления... Возможности микроэлектроники с каждым днем все расширяются, размеры и вес контроллеров постепенно уменьшаются. Можно предположить, что в скором будущем контроллеры начнут встраивать прямо в двигатели! Может, мы доживем до этого дня... www.rcdesign.ruРегуляторы хода для бесколлекторных моторов. Схема регулятор хода для коллекторного двигателя с реверсом
Motor Control: Управление коллекторным двигателем
На создание этого блога меня подвигло несколько причин. Первое – это отсутствие работы ( отпуск за свой счёт ) второе – это полезные и занимательные видео Александра Шенрок и третье – это возможность применить свои знания в электронике и свой опыт на практике, доказать прежде всего самому себе что ещё на что-то способен.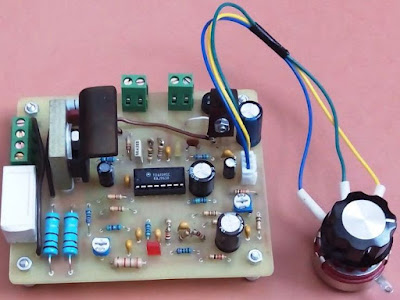


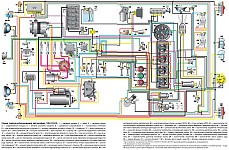
Самодельный регулятор коллекторного двигателя или тюнинг для советской "Нивы"
Дело было вечером, делать было нечего…. За окном уныло шел дождь…. Жена уехала к родителям…. Бесцельное скитание по просторам интернета не приносило никакого удовольствия…. А в руках все больше нарастал какой-то зуд…. Им хотелось творить! Недавно убирая в гараже, нашел старую еще времен СССР игрушку – модель автомобиля «Нива», с поворотными колесами и инерционным движителем. Еще тогда подумал – нужно из нее что ни будь сделать, подумал, положил на полку и забыл…. И вот думая чем бы его занять руки, вспомнил про эту игрушку. На дворе уже 21 век, а машинка еще не радиоуправляемая. Нужно срочно заняться тюнингом! Порывшись в своих закромах, достал от туда 9-ти граммовую сервомашинку и коллекторный электродвигатель с редуктором от какой то китайской игрушки. После некоторых раздумий, примерки, работы дрелью и надфилями, сервомашинка заняла свое место на раме машинки закреплённая двумя винтиками. Таким же способом установил и двигатель.
Таким же способом установил и двигатель.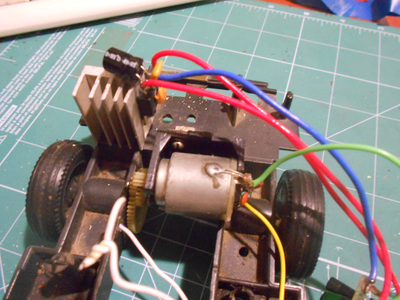 Вот ту то и возникла основная проблема – у меня не было регулятора для коллекторного двигателя. Заказывать в китайцев и ждать месяц, мне совершено не хотелось. Да и не мой это путь. Если что ни будь, я могу сделать сам, я лучше сделаю это сам! Первое что пришло в голову – сделать что-нибудь «серво-механическое», соединить серву с переменным резистором и через него менять обороты двигателя. Метод вполне рабочий, но мне показался каким-то не ненадёжным. Когда то читал в качестве регулятора можно использовать электронику от сервы. Снять редуктор, поставить резистор в среднее положение, к проводам идущим к микродвигателю подпаять более мощный Н-мост. Серва с нерабочим редуктором нашлась в загашниках, Н-мост использовал из китайского дешевого радиоуправления. Метод оказался рабочим но обороты двигателя изменялись не плавно, скачок от нуля до максимума. Можно сказать, получилось дискретное управление. На помощь пришел интернет, оказалось что схемы регуляторов коллекторников достаточно просты, микроконтроллер, небольшая обвязка, Н-мост.
Вот ту то и возникла основная проблема – у меня не было регулятора для коллекторного двигателя. Заказывать в китайцев и ждать месяц, мне совершено не хотелось. Да и не мой это путь. Если что ни будь, я могу сделать сам, я лучше сделаю это сам! Первое что пришло в голову – сделать что-нибудь «серво-механическое», соединить серву с переменным резистором и через него менять обороты двигателя. Метод вполне рабочий, но мне показался каким-то не ненадёжным. Когда то читал в качестве регулятора можно использовать электронику от сервы. Снять редуктор, поставить резистор в среднее положение, к проводам идущим к микродвигателю подпаять более мощный Н-мост. Серва с нерабочим редуктором нашлась в загашниках, Н-мост использовал из китайского дешевого радиоуправления. Метод оказался рабочим но обороты двигателя изменялись не плавно, скачок от нуля до максимума. Можно сказать, получилось дискретное управление. На помощь пришел интернет, оказалось что схемы регуляторов коллекторников достаточно просты, микроконтроллер, небольшая обвязка, Н-мост.  В наличие оказался PIC16F84, на нем и решил делать регулятор. Кому интересно схема и прошивка лежат здесь. Прошивкой микроконтроллеров занимаюсь не первый раз, поэтому с прошивкой не возникло проблем. От Н-моста что в схеме решил отказаться, такой мощный мне не нужен, да и транзисторов таких не было, оставил китайский.
В наличие оказался PIC16F84, на нем и решил делать регулятор. Кому интересно схема и прошивка лежат здесь. Прошивкой микроконтроллеров занимаюсь не первый раз, поэтому с прошивкой не возникло проблем. От Н-моста что в схеме решил отказаться, такой мощный мне не нужен, да и транзисторов таких не было, оставил китайский. 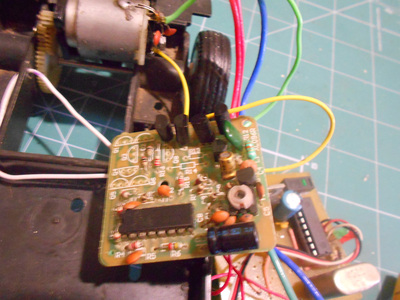 Плату делал по ЛУТ технологии. Травил перфосульфатом аммония, травит очень быстро – советую. Регулятор заработал сразу, откалибрувалался без проблем, обороты изменялись плавно.
Плату делал по ЛУТ технологии. Травил перфосульфатом аммония, травит очень быстро – советую. Регулятор заработал сразу, откалибрувалался без проблем, обороты изменялись плавно.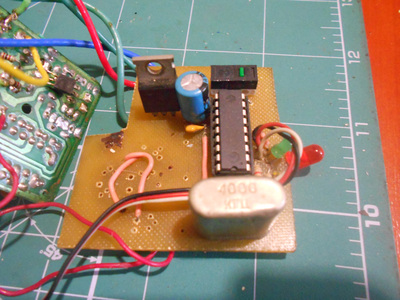 Дополнительно, на кренке закреплённой на радиаторе, сделал стабилизатор для питания электродвигателя. 5 В для приемника берется от регулятора. Собрав все вместе вот что получилось.
Дополнительно, на кренке закреплённой на радиаторе, сделал стабилизатор для питания электродвигателя. 5 В для приемника берется от регулятора. Собрав все вместе вот что получилось. А вот видео первой обкатки тюнингованной «Нивы» Рад если моя статья стала кому-то полезной. Удачи всем в моделизме и творчестве.
А вот видео первой обкатки тюнингованной «Нивы» Рад если моя статья стала кому-то полезной. Удачи всем в моделизме и творчестве. Регуляторы хода для бесколлекторных моторов
 Автор - Сергей Потупчик (serj)
Автор - Сергей Потупчик (serj) Вступление


Основные характеристики контроллеров
Особенности подключения
Настройки
Программирование
Возможные проблемы
О выключателях
Производители контроллеров



Заключение

интернет-магазин светодиодного освещения
Пн - Вс с 10:30 до 20:00
Санкт-Петербург, просп. Энгельса, 138, корп. 1, тк ''Стройдвор''









Поделиться с друзьями: