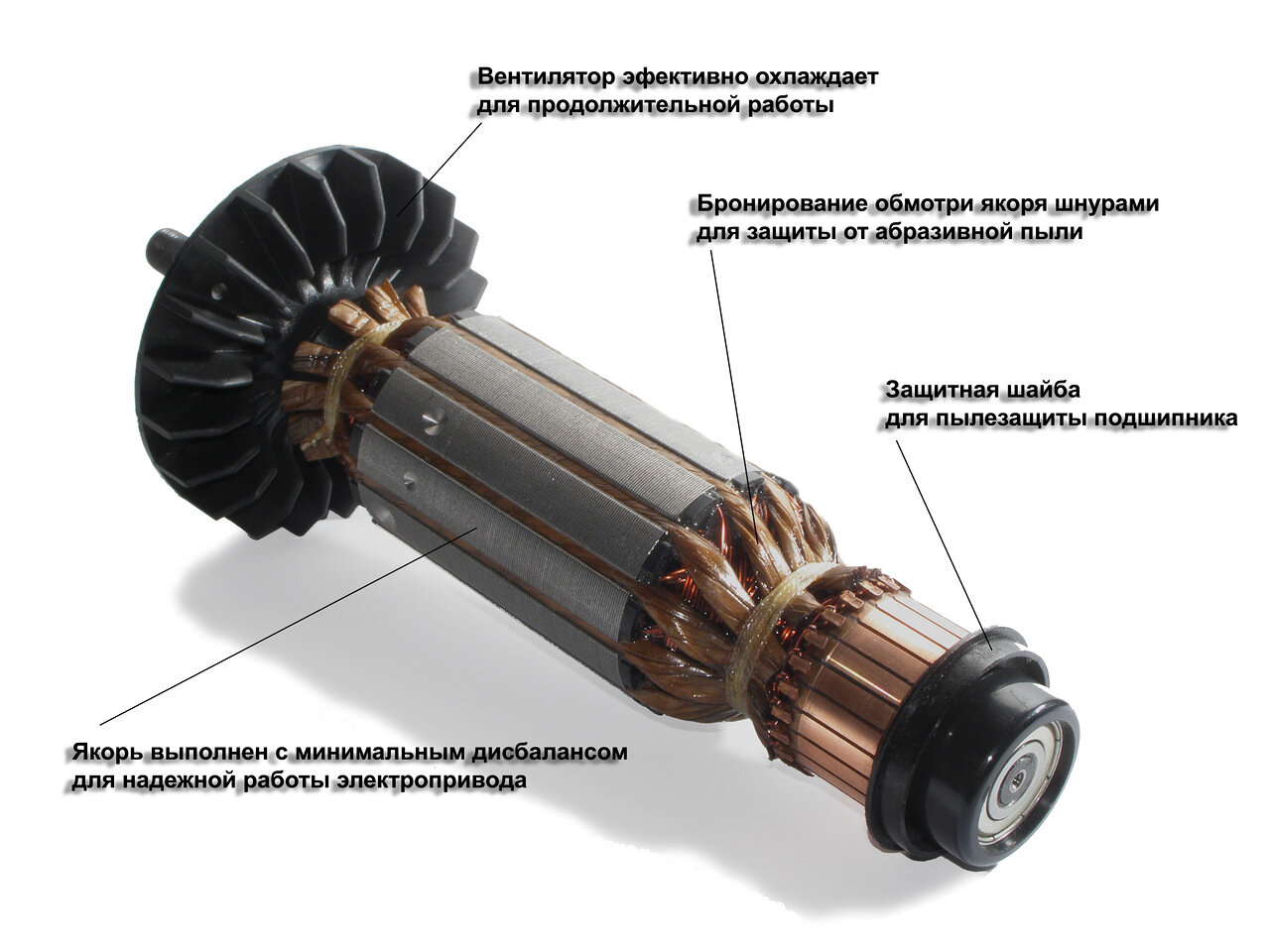
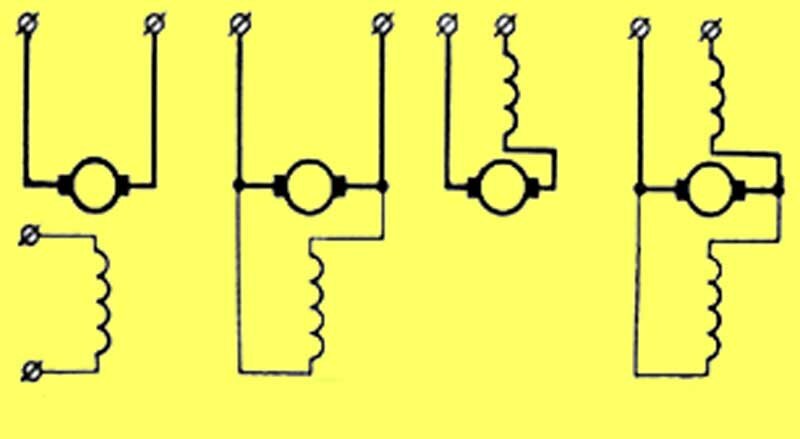
Не мужик прав,просто вам не встречался вот вы и подумали так как написали. У меня дома на разных станках стоит три двигателя со смешаным возбуждением.самый маленький что то в районе 300ватт самый большой 8кВт.Все они прекрасно увеличивают свои обороты при уменшении напряжения паралельной обмотки возбуждения Ш1-Ш2. Кстати у человека задавшего вопрос прекрасно видно на картинке что минус один, а плюса два.Такая указаная комутация подрозумевает что на шпильку Д1 или Д2(зависит от врашения) подается собственно +от источника питания а между шпилькой Д2 и шпилькой Ш2 ставится переменный резистор(подбирается методом тыка если неизвестен) Ток на резисторе будет меньше тока электродвигателя примерно раз в 10,в чем собственно и прелесть регулировки оборотов паралельной обмоткой возбуждения. Недостаток такого метода собственно в том что двигатель теряет свою жесткость в частоте вращения,она сильно начинает падать от нагрузки.Двигатель приобретает характеристики больше схожие с двигателем чисто последовательного возбуждения. Недостаток такого метода собственно в том что двигатель теряет свою жесткость в частоте вращения,она сильно начинает падать от нагрузки.Двигатель приобретает характеристики больше схожие с двигателем чисто последовательного возбуждения. Метод подать на паралельную обмотку полное напряжение, а на смешаную и якорную понижать или повышать тоже неплох хотя бы тем что выставленые таким образом обороту почти не меняются от нагрузки это радует.Двигатель по своим параметром больше становится чисто паралельного возбуждения, Но очень не радует обычно размер того сопротивления и протекающий на том сопротивлении полный ток электродвигателя. Что очень затрудняет возможность найти такой переменный резистор.Например для моего 8кВт нужен будет переменный резистор на номинальный ток в 40 ампер. Если автор вопроса не собирается регулировать скорость то пусть поставит перемычку между указаными плюсами на шпильках и будет ему счастье. Сообщение отредактировал Николай Влодимерович: 30 November 2012 - 22:39 www.chipmaker.ru Дорогие мои читатели, начинаем разбирать темы августовского стола заказов (боже мой, как быстро летит время!). Сегодняшняя тема может быть мало кого заинтересует, зато если кого заинтересует, так это будет очень в пользу им. Слушаем trudnopisaka: Напишите пожалуйста понятно о устройстве электродвигателей постоянного тока. Можно на примере одного из типов. Ведь с одной стороны принцип работы очень простой, а с другой, если разобрать один из электродвигателей, то там много деталей, назначение которых не очевидно. А на сайтах в начале поисковой выдачи есть только название этих деталей, в лучшем случае. Планирую с детьми собрать простой электродвигатель, чтобы это помогло им в понимании техники и они не боялись ее осваивать. Первый этап развития электродвигателя (1821-1832) тесно связан с созданием физических приборов для демонстрации непрерывного преобразования электрической энергии в механическую. В 1821 году М. Фарадей, исследуя взаимодействие проводников с током и магнитом, показал, что электрический ток вызывает вращение проводника вокруг магнита или вращение магнита вокруг проводника. Опыт Фарадея подтвердил принципиальную возможность построения электрического двигателя. Для второго этапа развития электродвигателей (1833-1860) характерны конструкции с вращательным движением якоря. Томас Дэвенпорт — американский кузнец, изобретатель, в 1833 году сконструировал первый роторный электродвигатель постоянного тока, создал приводимую им в движение модель поезда. В 1837 году он получил патент на электромагнитную машину. В 1834 году Б. С. Якоби создал первый в мире электрический двигатель постоянного тока, в котором реализовал принцип непосредственного вращения подвижной части двигателя. 13 сентября 1838 г. лодка с 12 пассажирами поплыла по Неве против течения со скоростью около 3 км/ч. Лодка была снабжена колесами с лопастями. Колеса приводились во вращение электрическим двигателем, который получал ток от батареи из 320 гальванических элементов. Так впервые электрический двигатель появился на судне. Испытания различных конструкций электродвигателей привели Б. С. Якоби и других исследователей к следующим выводам: Третий этап развития электродвигателей характеризуется открытием и промышленным использованием принципа самовозбуждения, в связи с чем был окончательно осознан и сформулирован принцип обратимости электрической машины. Питание электродвигателей стало производиться от более дешёвого источника электрической энергии — электромагнитного генератора постоянного тока. В 1886 году электродвигатель постоянного тока приобрёл основные черты современной конструкции. В дальнейшем он всё более и более совершенствовался. В настоящее время трудно представить себе жизнь человечества без электродвигателя. Он используется в поездах, троллейбусах, трамваях. На заводах и фабриках стоят мощные электрические станки. Электромясорубки, кухонные комбайны, кофемолки, пылесосы — всё это используется в быту и оснащено электродвигателями. Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта). При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода. Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора. Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс. Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя. Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется асинхронный двигатель переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное. Конструктивно все электрические двигатели постоянного тока состоят из индуктора и якоря, разделенных воздушным зазором. Индуктор (статор) электродвигателя постоянного тока служит для создания неподвижного магнитного поля машины и состоит из станины, главных и добавочных полюсов. Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах - специальная обмотка, служащая для улучшения условий коммутации. Якорь электродвигателя постоянного тока состоит из магнитной системы, собранной из отдельных листов, рабочей обмотки, уложенной в пазы, и коллектора служащего для подвода к рабочей обмотке постоянноготока. Коллектор представляет собой цилиндр, насаженный на вал двигателя и избранный из изолированных друг от друга медных пластин. На коллекторе имеются выступы-петушки, к которым припаяны концы секций обмотки якоря. Съем тока с коллектора осуществляется с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки закреплены в щеткодержателях, которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки на поверхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусомэлектродвигателя. Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка дегтя во всей этой вкусняшке — коллектор. Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо. Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток. Коллектор в электрических машинах выполняет роль выпрямителя переменного тока в постоянный (в генераторах) и роль автоматического переключателя направления тока во вращающихся проводниках якоря (в двигателях). Когда магнитное поле пересекается только двумя проводниками, образующими рамку, коллектор будет представлять собой одно кольцо, разрезанное на две части, изолированные одна от другой. В общем случае каждое полукольцо носит название коллекторной пластины. Начало и конец рамки присоединяются каждый к своей коллекторной пластине. Щетки располагаются таким образом, чтобы одна из них была всегда соединена с проводником, который будет двигаться у северного полюса, а другая — с проводником, который будет двигаться у южного полюса. Рис. 2. Упрощенное изображения коллектора Рис. 3. Выпрямление переменного тока с помощью коллектора Сообщим рамке вращательное движение в направлении по часовой стрелке. В момент, когда вращающаяся рамка займет положение, изображенное на рис. 3, А, в ее проводниках будет индуктироваться наибольший по величине ток, так как проводники пересекают магнитные силовые линии, двигаясь перпендикулярно к ним. Индуктированный ток из проводника В, соединенного с коллекторной пластиной 2, поступит на щетку 4 и, пройдя внешнюю цепь, через щетку 3 возвратится в проводник А. При этом правая щетка будет положительной, а левая отрицательной. Дальнейший поворот рамки (положение В) приведет снова к индуктированию тока в обоих проводниках; однако направление тока в проводниках будет противоположно тому, которое они имели в положении А. Так как вместе с проводниками повернутся и коллекторные пластины, то щетка 4 снова будет отдавать электрический ток во внешнюю цепь, а по щетке 3 ток будет возвращаться в рамку. Отсюда следует, что, несмотря на изменение направления тока в самих вращающихся проводниках, благодаря переключению, произведенному коллектором, направление тока во внешней цепи не изменилось. В следующий момент (положение Г), когда рамка вторично займет положение на нейтральной линии, в проводниках и, следовательно, во внешней цепи тока опять не будет. В последующие моменты времени рассмотренный цикл движений будет повторяться в том же порядке. Таким образом, направление индуктированного направление тока во внешней цепи благодаря коллектору все время будет оставаться одним и тем же, а вместе с этим сохранится и полярность щеток. Щёточный узел необходим для подвода электроэнергии к катушкам на вращающемся роторе и переключения тока в обмотках ротора. Щётка — неподвижный контакт (обычно графитовый или медно-графитовый). Щётки с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Как следствие, при работе ДПТ происходят переходные процессы, в обмотках ротора. Эти процессы приводят к искрению на коллекторе, что значительно снижает надёжность ДПТ. Для уменьшения искрения применяются различные способы, основным из которых является установка добавочных полюсов. При больших токах, в роторе ДПТ возникают мощные переходные процессы, в результате чего, искрение может постоянно охватывать все пластины коллектора, независимо от положения щёток. Данное явление называется кольцевым искрением коллектора или «круговой огонь». Кольцевое искрение опасно тем, что одновременно выгорают все пластины коллектора и срок его службы значительно сокращается. Визуально кольцевое искрение проявляется в виде светящегося кольца около коллектора. Эффект кольцевого искрения коллектора не допустим. При проектировании приводов устанавливаются соответствующие ограничения на максимальные моменты (а следовательно и токи в роторе), развиваемые двигателем.Конструкция двигателя может иметь один или несколько щеточно-коллекторных узлов. А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки. А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его. И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история. ВОТ ТУТ можно прочитать про него подробнее. Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко. Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА. Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой. Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость. А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором. Что касается электрической схемы включения двигателя, то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше. На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления. В настоящее время двигатели постоянного тока независимого возбуждения, управляемые тиристорными преобразователями, используются в промышленных электроприводах.’Эти приводы обеспечивают регулирование скорости в широком диапазоне. Регулирование скорости вниз от номинальной осуществляется изменением напряжения на якоре, а вверх — ослаблением потока возбуждения. Ограничения, по мощности и скорости обусловлены свойствами используемых двигателей, а не полупроводниковых приборов. Тиристоры могут соединяться последовательно или параллельно, если они имеют недостаточно высокий. класс по напряжению или току. Ток якоря и момент ограничены перегрузочной способностью двигателя по нагреву. Принцип работы: Сборка двигателя постоянного тока ПО ДЕТАЛЯМ: masterok.livejournal.com В тех приводах, где необходим широкий диапазон регулировки скоростей используется электрический двигатель постоянного тока. Он позволяет с высокой точностью поддерживать скорость вращения и осуществлять необходимые регулировки. В основе работы данного вида двигателей лежит электромагнитная индукция. Если проводник, по которому протекает электрический ток, поместить в магнитное поле, то, согласно правила левой руки, на него будет воздействовать определенная сила. Когда проводник пересекает магнитные силовые линии, в нем производится наведение электродвижущей силы, направленной в сторону, противоположную движению тока. В результате, получается обратное противодействие. Происходит преобразование электрической мощности в механическую с одновременным нагреванием проводника. Вся конструкция устройства состоит из якоря и индуктора, между которыми находится воздушный зазор. Индуктор создает неподвижное магнитное поле и включает в себя полюса главные и добавочные, закрепляемые на станине. Обмотки возбуждения располагаются на главных полюсах и создают магнитное поле. Добавочные полюса содержат специальную обмотку, улучшающую условия коммутации. В состав якоря входит магнитная система. Ее основными элементами являются рабочая обмотка, укладываемая в пазы, отдельные металлические листы и коллектор, с помощью которого к рабочей обмотке подводится постоянный ток. Коллектор изготавливается в виде цилиндра и насаживается на вал электродвигателя. К его выступам припаиваются концы якорной обмотки. Электрический ток снимается с коллектора при помощи щеток, закрепленных в специальных держателях и зафиксированных в определенном положении. Каждый двигатель постоянного тока осуществляет два основных процесса пуск и торможение. В самом начале пуска якорь находится в неподвижном состоянии, напряжение и сила, противоположная ЭДС, равны нулю. При незначительном сопротивлении якоря, значение пускового тока превышает номинальное, примерно в 10 раз. Во избежание перегрева обмотки якоря при пуске, применяются специальные пусковые реостаты. При мощности двигателей до 1-го киловатта, осуществляется прямой запуск. В электродвигателях постоянного тока применяется несколько способов торможения. При динамическом торможении обмотка якоря замыкается коротко, либо с помощью резисторов. Этот способ обеспечивает наиболее точную остановку. Рекуперактивное торможение является наиболее экономичным. Здесь происходит изменение направления ЭДС на противоположное. Торможение противовключением производится изменением полярности тока и напряжения в якорной обмотке, что позволяет создать эффективный тормозящий момент. electric-220.ru Электродвигатели постоянного тока действуют на основе использования принципа магнитной индукции и применяются на производстве в тех случаях, когда необходимо обеспечить регулировку скорости вращения в различных диапазонах, но с высокой точностью. На сегодняшний день существует множество вариантов исполнения электродвигателей постоянного тока. В зависимости от необходимой мощности их работа может обеспечиваться как за счет постоянных магнитов, так и за счет электромагнитов. Если попробовать отобразить устройство электродвигателя постоянного тока схематически, то у нас получится изображение с двумя цилиндрами, помещенными один в другой. Больший из цилиндров является полым и неподвижным и называется статор или же станина. Внутри станины помещается якорь – меньший из цилиндров, являющийся подвижным. При этом между цилиндрами внутри, в обязательном порядке, должно быть воздушное пространство и они не должны вплотную соприкасаться. Это необходимо, поскольку именно в воздушном зазоре формируется магнитное поле. Любой электродвигатель состоит из двух основных частей станины (статора) и якоря. На внутренней поверхности статора располагаются полюсы, которые изготавливаются из тонких листов электротехнической стали, изолируются друг от друга при помощи лака и заканчиваются расширениями – наконечниками. Эти наконечники предназначены для равномерного распределения магнитной индукции в воздушном зазоре. Уже непосредственно на самих полюсах располагаются несколько обмоток возбуждения. При этом некоторые из обмоток изготавливаются с большим количеством витков тонкого провода, в то время как конструкция других предполагает малое число витков толстого провода. Якорь представляет собой зубчатый цилиндр, который устанавливается на валу внутри статора и состоит из пакетов тонких листов электротехнической стали изолированных друг от друга. Стоит отметить, что между каждым отдельным пакетом находятся специальные каналы, предназначенные для вентиляции. В то же время отдельные пазы якоря соединяются между собой проводниками, выполненными из меди. Также необходимым условием при изготовлении якоря является наличие двухслойной обмотки. В основе принципа работы любого современного электродвигателя постоянного тока лежит принцип магнитной индукции, а также «Правило левой руки». В том случае, если по верхней части обмотки якоря пропустить ток в одном направлении, а по нижней в другом, то он начнет вращаться. Это обусловлено тем, что по правилу левой руки, проводники, которые уложены непосредственно в пазах якоря, будут выталкиваться из магнитного поля, которое создается станиной. Таким образом, верхняя часть будет выталкиваться влево, а нижняя – вправо, что приведет к вращению самого якоря, поскольку вся энергия от проводников будет передаваться и ему. Однако, в тот момент, когда проводники провернутся и части якоря поменяются местами расположения, его вращение остановится. Чтобы этого не случилось, в электродвигателе применяется коллектор, предназначенный для коммутирования обмотки якоря. На сегодняшний день этот тип электродвигателей является одним из самых популярных. Это обусловлено тем, что именно двигатели с таким напряжением устанавливаются на большинство автомобилей и не только на них, но и на множество другой техники, которая применяется для решения самых разнообразных задач. www.strodom.ru Наиболее простой метод регулирования скорости вращения двигателя постоянного тока основан на использовании широтно-импульсной модуляции (ШИМ или PWM). Суть этого метода заключается в том, что напряжение питания подается на двигатель в виде импульсов. При этом частота следования импульсов остается постоянной, а их длительность может меняться. ШИМ сигнал характеризуется таким параметром как коэффициент заполнения или Duty cycle. Это величина обратная скважности и равна отношению длительности импульса к его периоду. D = (t/T) * 100% На рисунках ниже изображены ШИМ сигналы с различными коэффициентами заполнения. При таком методе управления скорость вращения двигателя будет пропорциональна коэффициенту заполнения ШИМ сигнала. Простейшая схема управления двигателем постоянного тока состоит из полевого транзистора, на затвор которого подается ШИМ сигнал. Транзистор в данной схеме выполняет роль электронного ключа, коммутирующего один из выводов двигателя на землю. Транзистор открывается на момент длительности импульса. Как будет вести себя двигатель в таком включении? Если частота ШИМ сигнала будет низкой (единицы Гц), то двигатель будет поворачиваться рывками. Это будет особенно заметно при маленьком коэффициенте заполнения ШИМ сигнала. При частоте в сотни Гц мотор будет вращаться непрерывно и его скорость вращения будет изменяться пропорционально коэффициенту заполнения. Грубо говоря, двигатель будет "воспринимать" среднее значение подводимой к нему энергии. Существует много схем для генерации ШИМ сигнала. Одна из самых простых - это схема на основе 555-го таймера. Она требует минимум компонентов, не нуждается в настройке и собирается за один час. Напряжение питания схемы VCC может быть в диапазоне 5 - 16 Вольт. В качестве диодов VD1 - VD3 можно взять практически любые диоды. Если интересно разобраться, как работает эта схема, нужно обратиться к блок схеме 555-го таймера. Таймер состоит из делителя напряжения, двух компараторов, триггера, ключа с открытым коллектором и выходного буфера. Вывод питания (VCC) и сброса (Reset) у нас заведены на плюс питания, допустим, +5 В, а земляной (GND) на минус. Открытый коллектор транзистора (вывод DISCH) подтянут к плюсу питания через резистор и с него снимается ШИМ сигнал. Вывод CONT не используется, к нему подключен конденсатор. Выводы компараторов THRES и TRIG объединены и подключены к RC цепочке, состоящей из переменного резистора, двух диодов и конденсатора. Средний вывод переменного резистора подключен к выводу OUT. Крайние выводы резистора подключены через диоды к конденсатору, который вторым выводом подключен к земле. Благодаря такому включению диодов, конденсатор заряжается через одну часть переменного резистора, а разряжается через другую. В момент включения питания на выводе OUT низкий логический уровень, тогда на выводах THRES и TRIG, благодаря диоду VD2, тоже будет низкий уровень. Верхний компаратор переключит выход в ноль, а нижний в единицу. На выходе триггера установится нулевой уровень (потому что у него инвертор на выходе), транзисторный ключ закроется, а на выводе OUT установиться высокий уровень (потому что у него на инвертор на входе). Далее конденсатор С3 начнет заряжаться через диод VD1. Когда она зарядится до определенного уровня, нижний компаратор переключится в ноль, а затем верхний компаратор переключит выход в единицу. На выходе триггера установится единичный уровень, транзисторный ключ откроется, а на выводе OUT установится низкий уровень. Конденсатор C3 начнет разряжаться через диод VD2, до тех пор, пока полностью не разрядится и компараторы не переключат триггер в другое состояние. Далее цикл будет повторяться. Приблизительную частоту ШИМ сигнала, формируемого этой схемой, можно рассчитать по следующей формуле: F = 1.44/(R1*C1), [Гц] где R1 в омах, C1 в фарадах. При номиналах указанных на схеме выше, частота ШИМ сигнала будет равна: F = 1.44/(50000*0.0000001) = 288 Гц. Объединим две представленные выше схемы, и мы получим простую схему регулятора оборотов двигателя постоянного тока, которую можно применить для управления оборотами двигателя игрушки, робота, микродрели и т.д. VT1 - полевой транзистор n-типа, способный выдерживать максимальный ток двигателя при заданном напряжении и нагрузке на валу. VCC1 от 5 до 16 В, VCC2 больше или равно VCC1. Вместо полевого транзистора можно использовать биполярный n-p-n транзистор, транзистор дарлингтона, оптореле соответствующей мощности. chipenable.ru Электрический двигатель – неоценимое изобретение человека. Благодаря этому устройству наша цивилизация за последние сотни лет ушла далеко вперёд. Это настолько важно, что принцип работы электродвигателя изучают ещё со школьной скамьи. Круговое вращение электроприводного вала легко трансформируется во все остальные виды движения. Поэтому любой станок, созданный для облегчения труда и сокращения времени на изготовление продукции, можно приспособить под выполнение множества задач. Каков же принцип действия электродвигателя, как он работает и каково его устройство – обо всём этом понятным языком рассказывается в представленной статье. Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта). При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода. Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора. Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс. Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя. Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное. Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко. Что касается электрической то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше. На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления. • Скачать лекцию: двигатели постоянного тока Свежие записи: ukrlot.com Изобретение относится к области электротехники и может быть использовано в устройствах с батарейным питанием или питанием от сети постоянного тока. Техническим результатом является упрощение схемы подключения асинхронного двигателя к источнику питания. Указанный технический результат достигают тем, что схема подключения многофазного асинхронного двигателя к источнику постоянного тока содержит параллельные резонансные LC-контуры по числу обмоток двигателя. Каждый контур образован конденсатором и первичной обмоткой двухобмоточного дросселя, ко вторичной обмотке которого, индуктивно связанной с первой, подключена соответствующая обмотка, двигателя. Первичные обмотки дросселей контуров последовательно подключены к источнику постоянного тока через управляемый ключ, размыкающий цепь с заданной периодичностью. Каждый резонансный контур с включенной в него обмоткой двигателя настроен на собственную резонансную частоту. Значение резонансной частоты от контура к контуру вдоль цепи изменяется последовательно. 2 ил. Область техники, к которой относится изобретение Изобретение относится к электротехнике и может найти применение в устройствах с батарейным питанием или питанием от сети постоянного тока. Уровень техники Асинхронный двигатель (АД) относится к электрическим машинам переменного тока. Принцип работы такого двигателя основан на использовании вращающегося магнитного поля, которое образуется в статоре после подключения его обмоток к трехфазной сети переменного тока (основная схема включения АД). Вращающееся магнитное поле статора, пересекая проводники обмотки ротора, индуцирует в них электродвижущую силу (ЭДС), создающую в обмотке ротора ток. Взаимодействие этого тока с вращающимся магнитным полем статора вызывает электромагнитный момент, приводящий ротор во вращение. Для создания вращающегося магнитного поля статора необходимо выполнение двух условий, а именно: статорные обмотки должны быть смещены в пространстве друг относительно друга, что обычно обеспечивается конструкцией двигателя, и второе - токи в обмотках должны быть сдвинуты по фазе. Известны решения, когда двух- или трехфазную обмотку статора включают в однофазную сеть переменного тока. В этом случае для создания начального (пускового) момента и приведения ротора во вращение используют фазосдвигающий элемент, преимущественно конденсатор, подключаемый к одной из обмоток статора, т.н. пусковой обмотке (например, см. кн. И.И.Алиев. Асинхронные двигатели в трехфазном и однофазном режимах. Изд-во: РадиоСофт, Москва, 2004 г., стр.83-87). Для работы от сетей и источников постоянного тока обычно используют электродвигатели постоянного тока. Однако асинхронные двигатели более просты в обслуживании и надежны в эксплуатации, что объясняется отсутствием коллекторно-щеточного механизма, имеющего место в электродвигателях постоянного тока. Упомянутые качества делают привлекательным использование асинхронных двигателей в электроприводах с питанием от сетей постоянного тока. Известен электропривод транспортного средства, содержащий асинхронный двигатель, подключенный к источнику постоянного напряжения через преобразователь постоянного напряжения в трехфазное напряжение с регулируемой амплитудой, частотой и изменяемым порядком чередования фаз (см. патент на полезную модель № 57990, МПК Н02К 17/34, опубл. 2006.10.27). Известна схема подключения трехфазного асинхронного двигателя к источнику постоянного тока через трехфазный мостовой инвертор (см. патент SU № 1830178, МПК Н02Р 7/42, опубл. 23.07.93 г.). Во всех известных заявителю решениях, в том числе вышеупомянутых, между асинхронным двигателем и источником постоянного тока непременно включается инвертор - преобразователь постоянного тока в m-фазный переменный либо коммутирующее вентильное устройство, поочередно подключающее фазы двигателя к источнику постоянной ЭДС. Однако все упомянутые схемы отличаются сложностью, наличием большого количества коммутирующих элементов, что отрицательно сказывается на надежности его работы. В качестве ближайшего аналога для заявляемого решения принята схема включения асинхронного двигателя, примененная в приводе электроподвижного состава с питанием от тяговой сети (см. патент на полезную модель № 39763, МПК Н02Р 1/26, опубл. 2004.08.10). Схема содержит источник постоянного тока и соединенный с ним асинхронный двигатель с трехфазной обмоткой статора. Соединение АД с источником питания в упомянутом решении осуществлено через входные фильтры, однофазные инверторы, понижающие трансформаторы, мостовой выпрямитель с LC-фильтром и трехфазный коммутатор напряжения, к которому подключены статорные обмотки асинхронного двигателя. Трехфазный коммутатор напряжения выполнен на базе 6-ти электронных ключей. Недостатком известного решения является сложность схемы подключения, наличие большого числа коммутирующих элементов. Раскрытие изобретения Задачей заявляемого изобретения является разработка более простой схемы подключения асинхронного двигателя к источнику постоянного тока, использующей минимальное количество коммутирующих элементов. Поставленная задача решена тем, что в схеме подключения многофазного асинхронного двигателя к источнику постоянного тока согласно заявляемому изобретению для каждой обмотки статора асинхронного двигателя сформирован параллельный резонансный LC-контур, образованный конденсатором и первичной обмоткой двухобмоточного дросселя, ко вторичной обмотке которого, индуктивно связанной с первой, подключена соответствующая обмотка двигателя, первичные обмотки дросселей контуров последовательно подключены к источнику постоянного тока через управляемый ключ, размыкающий цепь с заданной периодичностью, при этом каждый резонансный контур с включенной в него обмоткой двигателя настроен на собственную резонансную частоту с соблюдением условия последовательного изменения (возрастания или убывания) значения резонансной частоты от контура к контуру. В отличие от прототипа и других известных решений, в заявляемом решении предложена принципиально новая схема питания асинхронного двигателя от источника постоянного тока, предполагающая последовательное подключение статорных обмоток двигателя к источнику постоянного тока с использованием одного ключа, размыкающего и замыкающего цепь с заданной периодичностью. Для включения каждой обмотки двигателя использован обычный параллельный LC-контур, настроенный на собственную резонансную частоту. Собственная резонансная частота контуров и «разбег частот» между контурами во многом определяются конструктивным исполнением двигателя. Настройка контура на заданную частоту обеспечивается подбором номиналов индуктивности и емкости контура. В качестве резонансных индуктивностей в заявляемой схеме использованы первичные обмотки двухобмоточных дросселей, которые обеспечивают накопление энергии с последующей отдачей ее в цепь без каких-либо преобразований. Ко вторичным обмоткам упомянутых дросселей в качестве нагрузки подключены соответствующие обмотки двигателя. В замкнутом положении ключа в последовательной цепи через первичные обмотки дросселей протекает постоянный ток, происходит процесс насыщения резонансных индуктивностей и накопление энергии в магнитопроводах дросселей. В момент размыкания цепи на каждой резонансной индуктивности возникает импульс самоиндукции, и они начинают отдавать накопленную энергию через конденсатор. В каждом резонансном контуре возникает колебательный процесс, и в цепи контура начинает протекать переменный ток. Благодаря тому, что каждый контур настроен на индивидуальную резонансную частоту, возникшие в контурах токи изменяются с разной частотой, в результате чего между контурами образуется сдвиг фаз. Переменный ток в первичных обмотках дросселей наводит переменный магнитный поток и переменную ЭДС во вторичных обмотках, в результате чего во вторичной цепи каждого контура возникает переменный ток, аналогичный протекающему в первичной обмотке. Через статорные обмотки, подключенные ко вторичным обмоткам дросселей в качестве нагрузки, также начинает протекать сдвинутый по фазе переменный ток. Таким образом, обеспечивается выполнение 2-го условия возникновения вращающегося магнитного поля: пропускание через обмотки асинхронного двигателя переменного тока, сдвинутого по фазе. Первое условие, как упоминалось выше, обеспечивается конструкцией двигателя, т.е. расположением статорных обмоток со смещением в пространстве. Выполнение обоих условий приводит к созданию в статоре асинхронного двигателя вращающегося магнитного поля, возникает вращающий момент, приводящий ротор двигателя во вращение. Сдвиг фаз между контурами определяется значениями резонансных частот контуров и разбегом частот между ними. Следует отметить, что сдвиг фаз между токами контуров не имеет постоянной величины и увеличивается с течением времени, что объясняется затухающим характером колебательного процесса в контуре. После затухания колебаний ключ замыкает цепь, и в контурах снова происходит накопление энергии. Процесс размыкания цепи и возникновение колебательных процессов повторяется периодически. По сути, в обмотках двигателя создается пульсирующее вращающееся магнитное поле, обеспечивающее раскрутку и вращение ротора. Изменением периода времени, когда цепь разомкнута, можно влиять на скорость вращения двигателя. Благодаря подключению статорных обмоток ко вторичным обмоткам дросселей практически полностью исключается прохождение через обмотки двигателя постоянной составляющей тока, вызывающей торможение ротора. Таким образом, упомянутая выше совокупность существенных признаков заявляемого решения позволяет получить новый положительный технический результат, заключающийся в создании в обмотках асинхронного двигателя пульсирующих, т.е. периодически возникающих после размыкания цепи, переменных токов, сдвинутых по фазе друг относительно друга. Пока цепь замкнута, в последовательной цепи контуров течет постоянный ток, после размыкания цепи накопленная в контурах энергия преобразуется в переменный m-фазный (по числу фаз двигателя) ток. Такое решение позволило исключить из схемы питания двигателя инвертор как самостоятельное устройство. В схеме использован всего один ключ на все фазы двигателя, что значительно упрощает схему питания, повышает надежность ее работы. В известных решениях с автономными инверторами преобразованный из постоянного переменный m-фазный ток, имеющий фиксированный (неизменный) сдвиг между фазами, постоянно подается на обмотки двигателя. В заявляемом решении переменный ток проходит через обмотки двигателя периодически (импульсами) в период времени, когда цепь разомкнута, причем сдвиг между фазами - величина непостоянная. В отличие от вентильного подключения, основанного на поочередном подключении обмоток асинхронного двигателя к питающей сети, в заявляемом решении подключение и отключение всех обмоток двигателя от сети питания осуществляется одновременно. Предлагаемая схема подключения асинхронного двигателя к источнику постоянного тока может быть применена к любому многофазному двигателю: двух-, трех-, четырехфазному и т.д. Причем схема обеспечивает преобразование постоянного тока в переменный m-фазный, т.е. разделение тока происходит на столько фаз, сколько фаз имеет конкретный двигатель. Краткое описание чертежей Заявляемое решение поясняется чертежами, где на фиг.1 изображена схема устройства, общий вид; на фиг.2 показаны временные графические зависимости тока на фазах двигателя. Осуществление изобретения Схема была реализована для подключения стандартного асинхронного двигателя, заводского изготовления, с 3-фазной статорной обмоткой LA LB LC. Схема подключения АД, представленная на фиг.1, содержит последовательную цепь из m (по числу обмоток двигателя, в конкретном примере - трех) резонансных параллельных контуров, каждый из которых образован конденсатором С и первичной обмоткой дросселя D, ко вторичной обмотке которого подключена соответствующая обмотка двигателя. Первичные обмотки (L1, L2, L3 ) дросселей последовательно подключены к источнику постоянного тока через управляемый ключ К. Ключ может быть реализован на базе транзистора, коммутируемого блоком управления. В простейшем случае в качестве такого блока можно использовать независимый генератор частоты. Каждый резонансный LC-контур настроен на свою частоту, определяемую параметрами емкости и индуктивности контура по формуле: Значения резонансных частот последовательно изменяются от контура к контуру вдоль цепи: Схема работает следующим образом. Ключ К замкнут. Под действием ЭДС источника в последовательно включенных индуктивностях контуров ток нарастает до определенного значения. Происходит процесс насыщения резонансных дросселей. До момента насыщения практически все питающее напряжение приложено к обмоткам. В момент насыщения происходит скачкообразный скачок (падение) напряжения, который может быть использован в качестве управляющего сигнала на размыкание цепи. Ключ размыкают, при этом индуктивные выбросы тока резонансных дросселей L1, L2, и L3 приводят к возникновению в резонансных LC-контурах колебательных процессов. Благодаря настройке контуров на разные частоты колебательный процесс в каждом контуре имеет собственную частоту, в результате чего токи изменяются с разной скоростью, что ведет к образованию между ними сдвига фаз. Во вторых обмотках дросселей, индуктивно связанных с первыми, также наводятся переменные токи, и через обмотки статора L A, LB, и LC начинает протекать сдвинутый по фазе переменный ток. Сдвиг фаз токов в обмотках статора, возникающий после размыкания цепи (момент T1 ), иллюстрирован на временной зависимости фиг.2. Ток i1 - соответствует току, протекающему через фазу А, токи i 2 и i3 соответствуют фазам В и С соответственно. В статорных обмотках АД возникает вращающееся магнитное поле, индуцирующее в обмотке ротора ЭДС и обеспечивающее возникновение электромагнитного момента, приводящего ротор во вращение. После затухания в контурах колебательных процессов электронный ключ К замыкает цепь. На графике этому моменту соответствует время Т2. Процесс накопления энергии повторяется. Созданное в обмотках двигателя пульсирующее вращающееся магнитное поле обеспечивает вращение двигателя. Испытанный образец в течение нескольких секунд вышел на номинальную частоту вращения. Предлагаемое схемное решение отличается простотой реализации и экономичностью. На базе предлагаемой схемы возможно изготовление электропривода вращательного и поступательного перемещения. Схема подключения многофазного асинхронного двигателя к источнику постоянного тока, отличающаяся тем, что для каждой обмотки статора асинхронного двигателя сформирован параллельный резонансный LC-контур, образованный конденсатором и первичной обмоткой двухобмоточного дросселя, ко вторичной обмотке которого индуктивно связанной с первой подключена соответствующая обмотка двигателя, первичные обмотки дросселей контуров последовательно подключены к источнику постоянного тока через управляемый ключ, размыкающий цепь с заданной периодичностью, при этом каждый резонансный контур с включенной в него обмоткой настроен на собственную резонансную частоту с соблюдением условия последовательного изменения значения резонансной частоты от контура к контуру вдоль цепи. www.freepatent.ruЭлектродвигатель постоянного тока: схема подключения, принцип работы. Схема подключения двигателя постоянного тока
Подключение электродвигателя постоянного тока П11
 ю-мет (29 November 2012 - 12:21) писал:ю-мет (29 November 2012 - 12:21) писал:ю-мет (29 November 2012 - 12:21) писал:ю-мет (29 November 2012 - 12:21) писал:ю-мет (29 November 2012 - 12:21) писал:
ю-мет (29 November 2012 - 12:21) писал:ю-мет (29 November 2012 - 12:21) писал:ю-мет (29 November 2012 - 12:21) писал:ю-мет (29 November 2012 - 12:21) писал:ю-мет (29 November 2012 - 12:21) писал:Как работает двигатель постоянного тока ?
Двигатель постоянного тока: принцип работы, общее устройство
Устройство электродвигателей постоянного тока
Основные процессы: пуск и торможение
Как работает двигатель постоянного тока
Электродвигатель постоянного тока: схема подключения, принцип работы



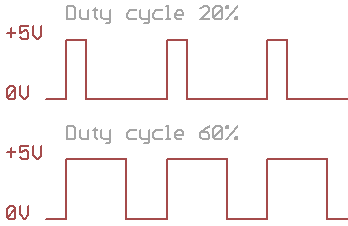
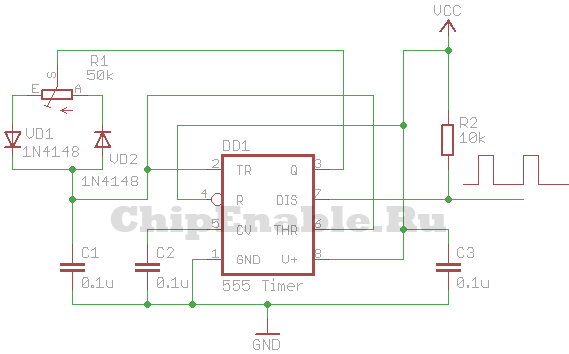
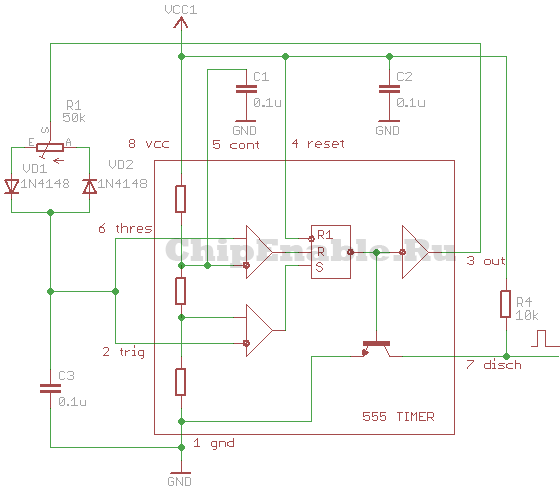
Регулятор скорости двигателя постоянного тока

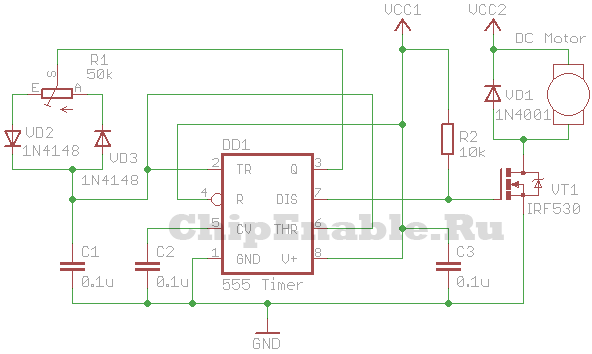

Принцип действия электродвигателя постоянного тока
Как работает двигатель постоянного тока


Принцип действия современных электродвигателей


схема подключения многофазного асинхронного двигателя к источнику постоянного тока - патент РФ 2406217

Рисунки к патенту РФ 2406217
 =1/
=1/ LC.A>B>C либо в обратном порядке: A<B<C. Направление изменения значений частот определяет направление вращения двигателя. Вращение двигателя осуществляется в направлении убывания частоты.
LC.A>B>C либо в обратном порядке: A<B<C. Направление изменения значений частот определяет направление вращения двигателя. Вращение двигателя осуществляется в направлении убывания частоты.ФОРМУЛА ИЗОБРЕТЕНИЯ

интернет-магазин светодиодного освещения
Пн - Вс с 10:30 до 20:00
Санкт-Петербург, просп. Энгельса, 138, корп. 1, тк ''Стройдвор''





Поделиться с друзьями: