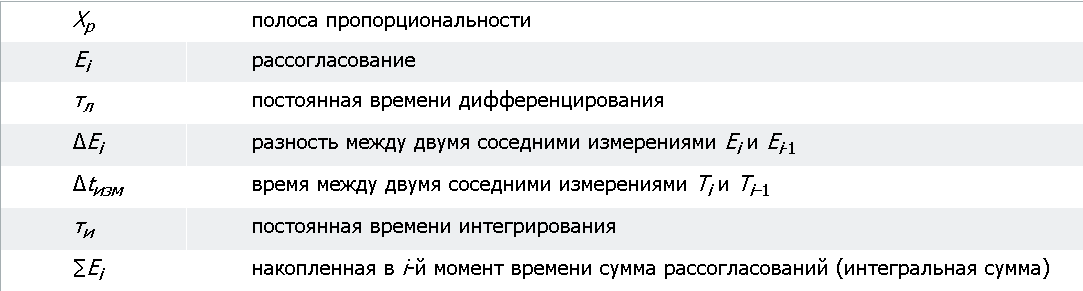
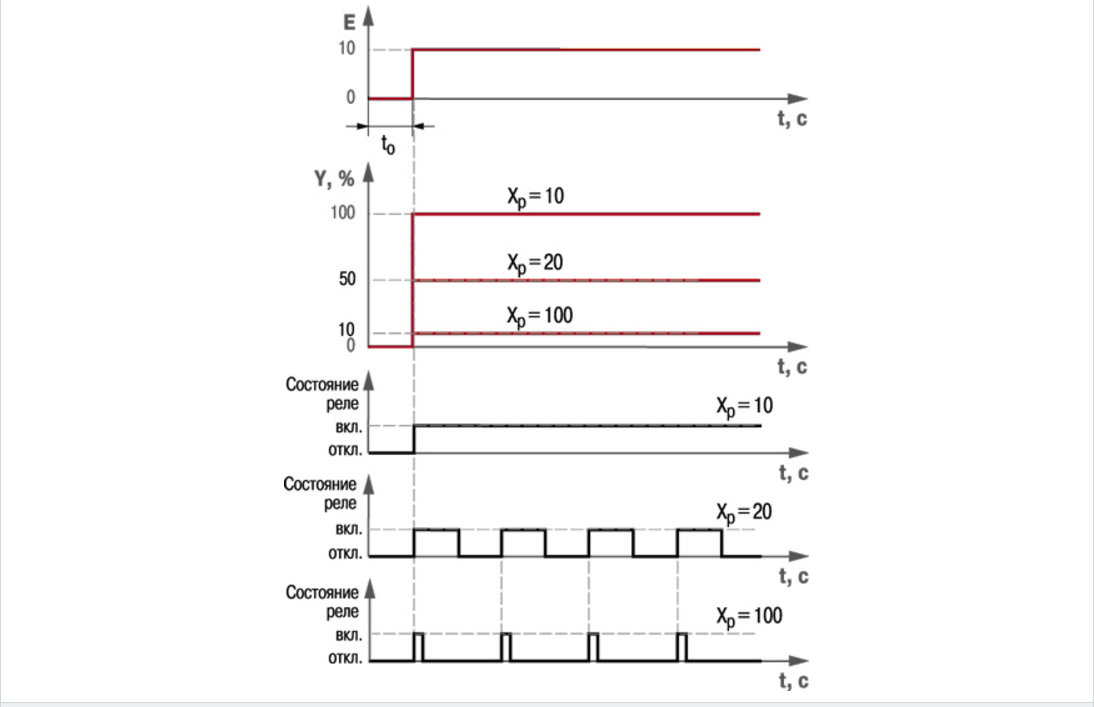
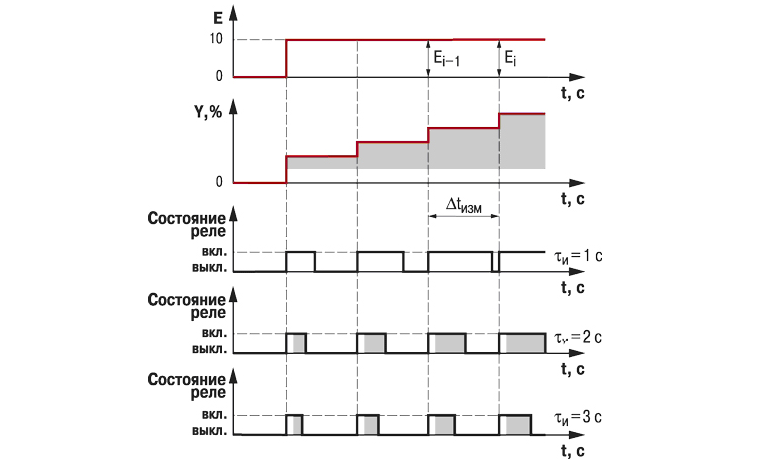
Всем привет. Рассмотрев в прошлой статье основу технологии построения веб-интерфейса, мы возьмем небольшую паузу с проектированием, и рассмотрим пару статей по ПИД–регулятору. Куда войдут основы автоматики, и на примере устройства синхронизации двигателей фрезерного станка на микроконтроллере, познакомимся с основными законами управления. А также рассчитаем основные коэффициенты законов для матмодели. В конце статьи выложен проект в Proteus на ATmega8. Для исключения последнего используется второй параметр, т.е. задающий. Техническое устройство, осуществляющее автоматическое управление называется управляющим устройством (УУ). А ОУ совместно с управляющим и задающим устройствами называют систему автоматического управления (САУ). Ниже структурная схема системы. Наш проект будет строится по последнему принципу управления – по ошибке. Ниже, слева структурная схема, а справа проект, где осуществляется управление по ошибке. ЗУ — это у нас двигатель с энкодером (с левой стороны), с которого импульсы поступают в микроконтроллер. Где в свою очередь прописана матмодель ПИД-регулятора. Контроллер выступает в роли УУ. Далее ШИМ генерирует необходимый импульс и посылает его на вход второго двигателя с энкодером, который правее. (Мы с Вами уже рассматривали ШИМ-управление на AVR). Выход импульсов с которого, является выходной величиной и ошибкой в обратной связи y ос. Кнопки — это возмущающее воздействие, которыми мы произвольно добавляем импульсы ОУ. Где в свою очередь УУ должно быстро и плавно подрегулировать под угол поворота задающего устройства. Далее САУ классифицируются по: 1. Алгоритму функционирования:— системы стабилизации — поддержание регулируемого параметра на заданном уровне;— программное управление – алгоритм задан в функции времени, где выходная величина изменяется во времени по заданному закону;— следящие системы — алгоритм функционирования заранее не известен, где регулируемая величина должна воспроизводить изменение некоторой внешней величины;— экстремальные системы — показатель качества или эффективности процесса может быть выражен в виде функции параметров системы, а сама функция имеет экстремум (максимум или минимум).— системы оптимального управления — процесс управления ведется таким образом, что некоторая характеристика процесса была бы оптимальной;— адаптивные системы – некоторые параметры ОУ и др. элементов системы могут изменяться.Наш алгоритм это программное управление, где выходная величина будет результатом ПИД управления.2. По виду дифференциальных уравнений, описываемых систему – линейные (статические характеристики всех элементов являются прямолинейными) и нелинейные (статическая характеристика является нелинейной).3. По характеру сигналов в основных элементах - непрерывные и дискретные(в последних непрерывный входной сигнал преобразуется на выходе в последовательность импульсов). Наш проект нелинейный и сигналы дискретные. И последнее, рассмотрим типовые законы управления, определяющие алгоритм управления в функции от ошибки управления. Под законом регулирования понимают алгоритм, в соответствии с которым управляющее устройство формирует воздействие, подаваемое на вход ОУ. Законы управления описываются передаточными функциями, которые являются одним из способов математического описания динамической системы. Вид передаточной функции управляющего устройства определяет закон управления. Различают пять основных законов управления: пропорциональный (П), интегральный (И), пропорционально –интегральный (ПИ), пропорционально-дифференциальный (ПД), пропорционально — интегрально – дифференциальный (ПИД). Рассмотрим каждый закон в отдельности на примере устройства синхронизации. Итак, исходные данные: Соберем пример в Proteus. Возьмем два движка с инкрементальными энкодерами, микроконтроллер, два счетчика импульсов, а также подключим осциллограф и ЖК индикатор для отображения рассогласования (ошибки). Рассмотрение датчиков угла поворота (энкодера) выходит за пределы статьи, единственное, что нам надо знать, они предназначены для преобразования угла поворота вращающегося объекта (вала) в электрические сигналы, позволяющие определить угол его поворота. Выше был представлен рисунок нашего проекта в Proteus. Ниже на рисунке пример настройки мотора с энкодером: П — регулятор. Одно из простых устройств и алгоритмов управления, в обратной связи, которое формирует управляющий сигнал. Выдает выходной сигнал u (t), пропорциональный входному (ошибке регулирования) e (t), с коэффициентом пропорциональности К, который вырабатывается пропорциональной частью П-регулятора в противодейтвие отклонению реглируемой величины от данного значения, в данный момент времени. u (t)=Kр*e (t), где Kр - коэффициент усиления регулятора. Чем больше отклонение, тем больше выход именно по данному значению. Т.е. статическая ошибка равна отклонению регулируемой величины. Здесь присутствует вероятность, что система никогда не стабилизируется на заданном значении. Увеличение коэффициента усиления увеличивает разницу между входом и выходом, при этом уменьшается статическая ошибка. Но рост этого коэффициента может привести к автоколебаниям в системе, а дальнейшее его увеличение приведет к потере устойчивости. Обычно на практике усилительные свойства П-регулятора характеризуют следующими величинами:— предел пропорциональности d=1/Kр - величина, обратная Kр— предел пропорциональности, выраженный в процентах D=d*100%=100%/Kр. Показывает, на сколько процентов от своего максимального значения должен изменится входной сигнал, чтобы выходной изменился на 100%. Автоколеба́ния — это незатухающие колебания в диссипативной ( устойчивое состояние, возникающее в неравновесной среде при условии диссипации (рассеивания) энергии, которая поступает извне) динамической системе с нелинейной обратной связью, поддерживающиеся за счёт энергии постоянного, т. е. непериодического внешнего воздействия.На рисунке ниже слева нормальный процесс П-регулирования, где видно, что линейность графика прямо пропорционально уменьшению ошибки. Справа, процесс автоколебаний в системе при большом коэффициенте. П-регулятор находит свое применение в тех же процессах, где не требуется точного поддержания заданного значения, описанных ранее, то есть в контролируемом процессе будет присутствовать статическая ошибка. Возникает данная ошибка из-за того, что выходной сигнал слишком мал для оказания существенного воздействия на поддержание системы на заданном уровне. Вполне допускается, что регулятор выведет требуемое значение, но при возникновении возмущающих воздействий, регулятор не сможет вернуть заданное значение, пока рассогласование не станет достаточно велико, чтобы выходной сигнал смог оказать достаточное воздействие. Для нашего примера такой закон не подходит. Идем далее. И-регулятор. Что значит интегральное управление? А то, что устройство вырабатывает сигнал (u (t)), пропорциональный интегралу от ошибки регулирования (e (t)). Система при таком законе астатическая, т.е.возмущение происходит на том участке системы, который находится за интегрирующим звеном. Но при этом динамические свойства системы с И-законом обычно хуже чем у системы П-управления. Ниже представлен закон И-регулятора. Время изодрома Ти=1/K0 - величина, обратная K0. Также показывает за какое время выход регулятора изменится на 100% (регулирующий орган переместится из одного крайнего положения в другое) при скачкообразном изменении входного сигнала на 100%. Таким образом Ти характеризует быстродействие регулятора. С уменьшением T растет колебательность переходного процесса. При слишком малых значениях T система регулирования может перейти в неустойчивое состояние. Ниже на рисунке слева устойчивое состояние, справа — неустойчивое состояние. В системе регулирования с И-регулятором обычно отсутствует статическая ошибка регулирования. Как правило И-регулятор не используется самостоятельно, а в составе ПИ- или ПИД- регуляторов. Так как ПИ-регулятор можно рассматривать как два регулятора, соединенные параллельно, то усилительные свойства ПИ-регулятора характеризуют два параметра:1) предел пропорциональности d=1/K1 - величина, обратная K12) время изодрома Ти=1/K0 — величина, обратная K0 . Динамические свойства системы с ПИ-регулятором лучше, чем с И-законом. Изодромная система в переходном режиме приближается к системе с пропорциональным управлением. А в установившемся режиме подобна системе с интегральным управлением. Чем больше коэффициент пропорциональности, тем меньше выходная мощность при одной и той же ошибке регулирования, чем больше постоянная времени интегрирования, тем медленнее накапливается интегральная составляющая. ПИ регулирование обеспечивает нулевую ошибку регулирования и нечувствительно к помехам измерительного канала. Ошибка регулирования (статическая) исключается за счет интегрального звена, которое образуется путем постоянного суммирования ε за определенный промежуток времени и формирования сигнала управления, пропорционального полученной величине. Недостатком ПИ регулирования является медленная реакция на возмущающие воздействия. Для настройки ПИ регулятора следует сначала установить постоянную времени интегрирования равный нулю, а коэффициент пропорциональности — максимальным. Затем как при настройке пропорционального регулятора, уменьшением коэффициента пропорциональности нужно добиться появления в системе незатухающих колебаний. Близкое к оптимальному значение коэффициента пропорциональности будет в два раза больше того, при котором возникли колебания, а близкое к оптимальному значение постоянной времени интегрирования — на 20% меньше периода колебаний. Оптимальным является переходной процесс с 20% перерегулированием. ПД-регулятор. Если нагрузка объекта изменяется часто и резко, и при этом объект имеет существенное запаздывание, то ПИ-регулятор дает неудовлетворительное качество регулирования. Тогда целесообразно в закон регулирования вводить дифференцирующую составляющую, т.е. воздействовать на регулирующий орган дополнительно по величине первой производной от изменения регулируемого параметра. Cигнал ПД-регулятора ( u (t) ) зависит от ошибки регулирования ( e (t) ) и от производной от этой ошибки (от скорости изменения ошибки). ПД-регулятор характеризуют два параметра: 1. Предел пропорциональности d=1/K1 — величина обратная К1.2. Постоянная времени дифференцирования (время предварения) Тд=K2. Это интервал времени между моментами достижения регулирующим органом одинакового положения при наличии дифференциальной составляющей и без нее. Параметр настройки дифференциальной составляющей. За счет дифференциальной составляющей упреждается перемещение регулирующего органа. Дифференцирующее звено вычисляет скорость изменения ошибки, т.е. прогнозирует направление и величину изменения ошибки. Если она положительна, то ошибка растет и дифференцирующая часть вместе с пропорциональной увеличивает воздействие регулятора на объект. Если отрицательна — уменьшается воздействие на объект. Эта система регулирования имеет статическую ошибку регулирования, но быстродействие у нее выше, чем П- , И- , Пи-регуляторы. В начале переходного процесса ПД-регулятор имеет высокое усиление и, следовательно, точность, а в установившемся режиме он вырождается в П-регулятор со свойственной ему статической ошибкой. Если статическую ошибку скомпенсировать, как это делается в П-регуляторах, то возрастет ошибка в начале переходного процесса. Таким образом, ПД-регулятор по своим потребительским свойствам оказывается хуже П-регулятора, поэтому на практике он используется крайне редко. П-звено имеет положительное свойство — вносит в контур регулирования положительный фазовый сдвиг, что повышает запас устойчивости системы при малом времени предварения. Однако с увеличением этого времени растет усиление регулятора на высоких частотах, что приводит к режиму автоколебаний. Чем больше время дифференцирования, тем больше скачок в перемещении регулирующего органа. ПИД-регулятор. Это сумма трех регуляторов П, И и Д (Пропорционально-интегрально-дифференцирующий). Выходной сигнал ПИД-регулятора ( u (t) ) зависит от ошибки регулирования ( e (t) ), от интеграла от этой ошибки и от производной от этой ошибки. Усилительные свойства характеризуют три параметра: Системы регулирования с ПИД-регуляторами сочетают в себе достоинства П- , И- , и ПД- регуляторов. В таких системах отсутствует статическая ошибка и они обладают высоким быстродействием. Ниже выложен проект в Proteus на ATmega8. Где представлена выше описанная модель ПИД — регулятора. Синхронизация двигателей станка( Скачали: 302 чел. ) В следующей статье рассмотрим расчет основных коэффициентов законов регулирования для нашего проекта, а именно синхронизации двигателей станка. Написание матмодели для микроконтроллера и существующие варианты. А также этапы проектирования: от замысла до платы. На этом мы сегодня и остановимся. Всем пока. Просмотрено 9428 раз. www.ap-impulse.ru ПИД-регулятор — это прибор для управления технологическим процессом, который используется в методе ПИД-регулирования, основанном на трех законах регулирования: пропорциональном, интегральном и дифференциальном. Интегральный сильфон и переменное ограничение позволяет обеспечить интегральное регулирование. Два дифференциальных сильфона и другое переменное ограничение дает возможность регулятору осуществлять дифференциальное регулирование. Если выход увеличивается, то входной сильфон и нижний дифференциальный сильфон расширяются. Верхний дифференциальный сильфон расширяется позднее из-за переменного ограничения. Балансир поворачивается, и выход немедленно повышается. Когда входной сигнал полностью перетечет в верхний дифференциальный сильфон, этот сильфон приложит силу, которая уничтожит силу, приложенную нижним дифференциальным сильфоном. На этой точке дифференциальное регулирование прекращается. В то же время, когда это происходит, сильфон обратной связи расширяется в результате изменения выхода. Изменение выхода подается на интегральный сильфон, который вызывает силу, стремящуюся удержать клапан ближе к соплу. Это действие держит выход на высоком уровне в течение времени, когда переменная процесса не равна уставке. Выход будет продолжать увеличиваться до тех пор, пока переменная процесса не вернется в заданному значению уставки. ПИД-регулятор будет хорошим выбором для работающей на газе печи для подогрева нефти, потому что последующий процесс, куда поступает подогретая нефть, допускает лишь очень маленькие отклонения температуры нефти от заданного значения, а большие запаздывания в процессе подогрева делают очень трудной задачу определения и устранения отклонений. Одна из причин запаздывания — емкость. Печь имеет способность сохранять большое количество тепла внутри своих стенок. Накопленная теплота передается к нефти, но передача не происходит мгновенно. Если внутренние стенки нагреты слишком сильно, потребуется некоторое время для понижения их температуры, в течение которого нефть может быть перегрета. Если внутренние стенки не достаточно нагреты, то нефть может не получить достаточно тепла. Дифференциальная составляющая ПИД-регулятора помогает преодолевать запаздывания посредством выработки эффективных упреждающих воздействий. Интегральная составляющая непрерывно корректирует выходной сигнал при наличии смещения пока регулируемая температура не возвращается к уставке. kipiavp.ru Многие процессы в автоматизации (например порошковая покраска, изготовление выпечки, поддержание давления в трубопроводе) требуют точного регулирования физического параметра. С такими задачами хорошо справляется библиотека CoDeSyS ПИД регулятор. Эта тема довольно сложная, многогранная. Целые институты занимаются разработкой таких сложных и многоуровневых алгоритмов. Из этой статьи вы узнаете: Как работает ПИД-регулятор?Описание библиотеки для CoDeSySРабочая схема ПИД-регулятора Приветствую посетителей моего блога! В сегодняшней статье я отвечу на вопрос — как работает ПИД-регулирование, для чего это нужно и как его использовать на практике... Начнём с теории. Пропорционально-интегрально-дифференциальный (ПИД) регулятор — прибор в управляющем контуре с обратной связью. Устройство, формирующий сигнал с целью достижения высокого качества и точности переходного процесса в системе. Наиболее эффективный вид регулятора для обеспечения высокой точности параметра(температуры, длины, давления). Существует специальная формула для формирования сигнала... Ниже приведена таблица составляющих формулы: Давайте поговорим о параметрах, которые непосредственно участвуют в процессе работы регулятора: Хр — полоса пропорциональности. В общих чертах, чем шире Хр, тем меньше величина Y при одном и том же E. То есть чем больше Хр, тем короче импульсы. Ти — интегральная составляющая. Эта величина позволяет выдавать сигнал в зависимости от накопленной ошибки ( или от накопленного отклонения Е). Чем выше параметр, тем он реже и меньше выдаёт сигнал при рассогласовании Е. Это для того, чтобы сигнал не раскачивал систему и не совершал перерегулирование. Тд — дифференциальная составляющая. Эта величина позволяет выдавать сигнал Y, при дополнительных резких возмущениях в системе. по — русски говоря, этот параметр срабатывает, когда нужно быстро среагировать на возмущающие воздействия. Естественно, чем он больше, тем длиннее импульс. Я думаю с точки зрения теории все понятно. Тогда переходим непосредственно к практике. Для чего и как используется ПИД-регулятор? Я говорил об этом, скажу ещё раз, библиотеки обязательно скачивайте с официальных источников. С сайта ОВЕН или библиотеки OSCAT. Рекомендую не использовать библиотеки с форумов или с других источников. Пишите лучше сами. Только вы понимаете от начала до конца, как у вас всё работает. Для задвижек я рекомендую использовать данный функциональный блок, он хорошо зарекомендовал себя, и за всё время работы на реальном объекте у меня не было к нему никаких вопросов. На изображении ниже приведён функциональный блок ПИД-регулятора. Описание каждого входа и выхода: Входные значения: Запуск АНР, возможные значения: 0 или 1. Выходные значения: Хочу заметить, функциональный блок универсальный. То есть подходит и для дискретных задвижек, и для аналоговых. Возникает сразу же вопрос, а как же на самом деле правильно использовать данную библиотеку, чтобы она правильно функционировала и не глючила? Предлагаю вам рабочую схему библиотеки ПИД-регулятора: setAPID_otopl является вспомогательным блоком для ввода коэффициентов ПИД-регулятора. Хочу сказать, что на входах блока обязательно должны стоять какие-то переменные, пускай даже если будут стоять в положении FALSE. А какие вы используете библиотеки в своих проектах? Пишите в комментариях. На этом я заканчиваю, хорошего вам настроения, всего наилучшего. Пока, пока. С уважением, Гридин Семён. kip-world.ru Для процессов системы требуется способность параметров к реагированию на внешнее действие и поддержание системных постоянных величин. Для примера, система насосов с клапанами отвода. Для каждого клапана поддержание потока в постоянном виде обеспечивает постоянное давление в трубах. Помпа в системе приводится в действие приводом, при открывании клапана скорость двигателя увеличивается и снижается при закрытии, чтобы поддерживать давление в трубах на одном уровне. Для такого поддержания давления существует прибор, который называется регулятором задания. Давление в трубах на датчике идет в сравнение с параметром заданного давления. Регулятор сравнивает системное давление с давлением задания, определяет задачу скорости для двигателя для изменения ошибки. Простой вид регулятора применяет план действий ПИД-регулирования. В нем применяются три составляющие типа регуляторов для удаления ошибки: дифференциальный, интегральный и пропорциональный регулятор. Такой регулятор – главный, скорость задается в прямой зависимости от ошибки. При применении пропорционального регулятора система будет иметь ошибку. Малые значения коэффициента регулятора пропорционального типа дают вялость системы, а высокие параметры к колебаниям и нестабильности системы. Такой регулятор применяется для удаления ошибки. Скорость увеличится до удаления ошибки (снизится при негативной ошибке). Небольшие значения суммирующей составляющей слишком оказывают влияние на деятельность регулятора в общем. При установлении больших значений происходит промахивание системы, она функционирует с перерегулированием. Такой регулятор измеряет скорость корректировки ошибки, применяет для повышения системного быстродействия, увеличивает регуляторное быстродействие в общем. Во время увеличения быстродействия регулятора повышается перерегулирование. Это обуславливает к системной нестабильности. Во многих случаях составляющая дифференциальная становится равной нулю или близкой к наименьшему значению для того, чтобы предотвратить это состояние. Она бывает полезной в позиционирующей системе. Множество регуляторов имеют принцип прямого действия. Повышение скорости двигателя приводит к повышению переменной величины процесса. Это случай в системе насосов, давление это величина переменная процесса. Повышение скорости двигателя обуславливает повышение давления. Во многих системах повышение скорости двигателя обуславливает к снижению параметра переменной процесса. Температура вещества, которое обдувается вентиляционной системой теплообменника – процессная переменная величина: при повышении скорости вентиляционной системы температура вещества снижается. В этом разе нужно применить регулятор действия обратного вида. Для моторной управляемости системы настраивание ПИД-регулятора бывает сложным процессом. Расскажем, какие шаги для настройки могут сделать проще эту процедуру. Управляющая панель частотного преобразователя А300 состоит из 3-уровневой структуры: Установить метод управления частотником в значении Р0-02: Установить характеристики номинального значения электромотора (применяйте параметры с таблички и паспорта электромотора): После подсоединения и введения параметров нужно проконтролировать направление вращающего момента электромотора. После отключения меню программы на экране покажется 50 герц, клавишей «вниз» установите наименьшую частоту для задания направления вращающего момента. Для пуска мотора нажмите клавишу «пуск» (параметр Р0-02=0), определите направление момента вращения, затормозите мотор, нажав клавишу «стоп». Если вращение не совпадает с направлением, то измените две любые фазы питания мотора (замену фаз производить при отключенном частотнике) или поменяйте параметр настройки Р0-09= (0-вперед, 1-назад). Еще раз проконтролируйте момент вращения, нажав клавишу «пуск», если направление момента вращения совпадает, то затормозите мотор, нажав клавишу «стоп». Нажмите клавишу «вверх» и возвратите настроенную частоту 50 герц. Переставить соединение «J1» в состояние «I». Связь обратного вида (4 мА). Подсоединен датчик давления на 16 бар с сигналом выхода от 4 до 20 мА. Для давления в 10 бар нужно установить значение РА-01=(10/16)*100%=62,5% Произведите тестовый пуск. Проверяйте поддерживаемое значение параметра по приборам, дублирующим измерения (ротаметр, термометр, манометр). Если система регулировки функционирует нестабильно или долгий отклик на замену проверяемого параметра, то применяйте настройки значений РА-05, -06, -07. Эти значения предназначены для точной настройки ПИД-регулятора. Датчик обратной связи подсоединен к токовому входу аналогового типа, датчик значения уставки к входу аналогового типа напряжения. Датчик связи определен по токовому выходу, входом связи обратного вида применяется токовый вход. Задается РR.10-00=02 (обратная связь с минусом по входу, повышение частоты выхода, повышает давление). Вход связи обратного вида не создает масштаб по усилению и смещению. Применяя параметр PR10-01 можно изменять значение сигнала связи обратного вида в расчетах. Применение параметра PR10-01 для корректировки значения сигнала связи обратного типа. Значением PR10-01 можно корректировать значение сигнала связи обратного вида, который применяется в вычислениях. Интервал пропорциональности 0-10, по настройкам завода 1. Сигнал связи обратного вида повышается в 2 раза перед установкой в ПИД-регулятор. Это равно снижению интервала входа в 2 раза. Сигнал связи обратного вида снижается в 2 раза перед установкой в регулятор, это эквивалентно увеличению интервала входа в 2 раза. Сейчас интервал ограничен значением датчика. Пример установки значения параметра PR10-01 (масштаб усиления обратной связи). Интервал действия датчика: -1000Ра – 5000Ра. Наибольшее давление функционирования: 2000Ра. Применяемая часть интервала работы датчика (закрепленная): -1000Ра-2000Ра. Это будет равно: 2000Ра –(-1000Ра) 5000Ра –(-1000Ра) = 50% Если интервал действия не больше 2000Ра с датчиком, то величина параметра PR10-01 = 1/50%=2 Наибольший сигнал датчика: MaxVal Наименьший сигнал датчика: MinVal Наибольший нужный сигнал связи обратного вида MaxFBVal Установленную частоту можно изменять операторами наклона и перемещения опции преобразования. Направление момента вращения установки вентилятора не изменяется, лучше применять AVI вход с заданием значения PR 02-00=01. Задать в PR01-00 величину наибольшей частоты механизма вентиляции (PR01-00 = 50 герц). Наименьшая частота не оказывает влияния на действие регулировки. Задать PR04-00 AVI перемещение интервала. PR04-01 AVI полярность. PR04-02 AVI корректировка наклона. Вращение производится в одну сторону, PR04-03 = 0 (по заводским настройкам). Для установки величины входа интервал частоты рассчитывается 0-100%. При функционировании вентилятора давлению в 1500 Ра равен сигнал датчика 10,67 мА. Величине уставки 1500 Ра равна частота выхода 42%*50 герц = 21 герц и 84%*50 герц = 42 герц. Можно устанавливать значение в Ра. Если 100% интервала равно 2000 Ра, то при коэффициенте 00-05 = 2000/Fmax = 2000/50 = 40, установленная величина 1500 и задается 1500 Ра. Верхняя граница частоты выхода при регулировке определяется формулой: Fmax=Pr01-00хPr10-07. Ускорение – замедление. При взаимодействии с регулированием ПИД нужно время ускорения и замедления устанавливать минимальным для качественной регулировки. Настраивание регулятора: Советы по настраиванию: chistotnik.ru Содержание: Пид-регуляторы предназначены для того чтобы пропорционально, интегрально и дифференциально управлять различными процессами. Именно так расшифровывается аббревиатура этих устройств. Правильная настройка ПИД-регулятора обеспечивает быстрое достижение требуемых параметров для всей системы. Сигнал поступающий от какого-либо объекта, преобразуется определенным образом в регулирующем устройстве, а затем он возвращается и оказывает воздействие на управление этим объектом. Наиболее характерным примером использования этих приборов являются термосистемы, связанные с изменениями или поддержанием на определенном уровне различной температуры. За счет тонких настроек удается существенно снизить энергетические потери при охлаждении или нагреве. Конкретные модификации ПИД-регуляторов подбираются в соответствии с индивидуальными особенностями той или иной термосистемы. Необходимость тонких настроек рекомендуется рассматривать на примере работы обогревателя. Этот нагревательный прибор управляется ПИД-регулятором и должен поддерживать заданные температуры. Уровень температуры измеряется и контролируется термопарой. Конечная цель настроек заключается в подборе наиболее оптимального коэффициента, с помощью которого будет поддерживаться заданный температурный режим. 1. На представленных графиках видны попытки увеличения температуры с 10 до 25 градусов. В этом случае возможны различные варианты. Общим для них является подключение регулятора к обогревающей установке, в результате, его работа начнет осуществляться в режиме управляемой мощности, а микроклимат в помещении достигнет нужного уровня. Идеальная конфигурация температурной кривой обозначена красным цветом (рис. 1). То есть, данный физический параметр плавно движется к заданной отметке за максимально короткий промежуток времени. Оптимальный временной промежуток определяется достаточно сложно, поскольку на него оказывают влияние такие факторы как мощность обогревателя, размеры помещения и т.д. Эта величина определяется экспериментальным путем. 2. Температурный график черного цвета указывает на неправильный выбор коэффициента при регулировании. Работа системы становится неустойчивой, регулятор функционирует неравномерно, а заданное значение не соблюдается. В более благоприятных условиях температурные графики все так же далеки от стандартных значений (рис. 2). Черная кривая отображает сильные скачки относительно требуемого значения, а зеленая указывает на плавную, но слишком медленную регулировку. 3. Наиболее приемлемые варианты всех трех кривых обозначены на рисунке 3. Идеальный температурный график, обозначенный красным цветом, возможен только в теории. На практике же выполняется длительный подбор коэффициентов, которые позволяют получить лишь приближенные значения, пригодные для использования. То есть, согласно представленных графиков, температура 250С достигается в среднем за 15-20 минут при максимальных скачках в 2 градуса. Выбор необходимых коэффициентов, вычисления и настройка могут производиться с помощью различных методов. Данная методика настройки регулятора предполагает следующий порядок действий: Если используются каскадные регуляторы, то вначале следует настроить ведомый регулятор, а затем – ведущий. Разница между временными константами ведущего и ведомого регуляторов довольно существенная. У первого устройства она больше, чем у второго примерно в 5 раз. В этом случае настройка ПИД-регулятора выполняется в определенной последовательности: electric-220.ru ПИД (или английская аббревиатура — PID) – это регулятор, осуществляющий пропорциональное, интегрирующее и дифференциальное управление. ПИД регуляторы находят широкое применение в современных системах точного контроля, таких как управление термосистемами и системами позиционирования. Использование ПИД регуляторов помогает уменьшить энергетические потери на настройку системы и обеспечивают более быстрый выход на требуемые параметры. В общем случае ПИД регулятор получает значение определяющего параметра от объекта (Рис. 1) и воздействует на управление, состояние которого влияет на исходный параметр. Классическим примером применения ПИД регулятора являются управление термосистемой, будь это нагреватель или холодильная установка. Данный пример интересен тем, что нагрев или охлаждение процессы достаточно инертные и зачастую снижение температуры получается естественным путем из-за потерь Рис. 1 ПИД регуляторы применяются в системах, математическое описание которых трудоемко, или не может быть получено из-за случайного характера воздействия внешней среды или помех. Для термосистемы информация о состоянии объекта представляет собой значение температуры с датчика, а объект управления – нагреватель системы. Размерности графиков приведены условно, так как точная модель регулятора зависит от конкретных особенностей термосистемы. Рис. 2 Пропорциональное управление рассчитывается как произведение постоянного коэффициента Кpна текущую ошибку отклонения. Если включить в обратную связь нагревателя термосистемы только пропорциональное управление, требуемую температуру вообще невозможно достичь (Рис. 2). Это связано с инерционностью системы, так как управление нагревателем должно осуществляется с учетом динамики повышения температуры объекта. Интегральное регулирование реализуется умножениясуммы ошибок температурдо текущего момента временина интегральный коэффициент KI. Для термосистем интегрирующее управление вполне может поддерживать заданную температуру(Рис. 3). Такое управление компенсирует запаздывание нагревание объекта и позволяет приблизиться к требуемому значению с большей или меньшей точностью. Для систем с меньшей инерционностью применения только интегрального управления неприменимо, так как запаздывание процесса накопления ошибки приведет к «вылетанию» регулируемого параметра и появлению колебаний. Рис. 3 С применением дифференциального управления система получает возможность компенсировать возможную будущую ошибку параметра. Расчет дифференциальной составляющей численно выглядит как разность между текущим и предыдущим значением параметра, умноженную на коэффициент регулирования KD. Так как используется измерения, выполненные в небольшом интервале времени, ошибки и внешнее воздействие сильно влияет на процесс регулирования. Дифференциальное управление в чистом виде трудно реализуется для большинства систем из-за указанных факторов. Рис. 4 В сумме, три компоненты ПИД регулятора обеспечивает получение эффективного результата в коротком промежутке времени (Рис. 4). На практике лучшие результаты достигаются подбором констант для каждого компонента регулирования. Также находят применения саморегулирующие ПИД контроллеры, для которых коэффициенты рассчитываются программным путем внутри системы. elektronchic.ru Очень часто для системных процессов необходимо, чтобы контролируемый параметр (например, температура или скорость вращения) был способен мгновенно реагировать на воздействие извне и при этом поддерживать другие значения системных констант, таких как давление, поток и т. п. В качестве примера можно привести насосную систему, которая содержит несколько клапанов для отвода жидкости. Для поддержания постоянного равномерного потока на каждом клапане давление трубопровода должно иметь постоянное значение. Если насос системы управляется приводом, то в случае открытия одного или нескольких клапанов скорость мотора необходимо повышать, а в случае закрытия – понижать. Так в системе будет поддерживаться постоянное давление. Для обеспечения такой работы требуется ПИД-регулятор. Давление системы измеряется датчиком и сравнивается с заданным значением. По результатам сравнения ПИД-регулятор контролирует скорость мотора. В этой статье мы рассмотрим, что же представляет собой такое устройство. С целью устранения ошибок в системе в состав упомянутого устройства входят три составляющих: интегральный, дифференциальный и пропорциональный регуляторы. Пропорциональный прибор является основным там, где задание уровня скорости пропорционально ошибке. Однако если использовать только эту составляющую, то в системе всегда будет присутствовать ошибка. Высокие значения данного устройства приводят к колебаниям и нестабильности системы, а низкие - к «вялости». Интегральный прибор используют для исключения ошибок. Скорость растет до момента исключения погрешности (при отрицательной ошибке – уменьшается). Относительно малые величины интегральной составляющей оказывают существенное влияние на работу прибора в целом. Если установить слишком большое значение, то система начнет работать с перерегулированием. Дифференциальное устройство оценивает скорость изменения ошибок, оно применяется для увеличения скорости системы. Однако при повышении быстродействия регулятора увеличивается и уровень перерегулирования, что может привести к нестабильности системы. Чаще всего данная составляющая выставляется на значение, близкое нулю, однако она может оказаться весьма полезной в системе позиционирования. Свое название ПИД-регулятор получил по первым буквам этих трех компонентов. Как видно из описания прибора, важным требованием к правильной работе устройства является его отладка. Для каждой системы настройка прибора проводится индивидуально, здесь мы рассмотрим основные рекомендации, общие для различных ситуаций: 1. Установить дифференциальную и интегральную составляющие в нуль. Задать максимальную скорость и наблюдать за реакцией. 2. Увеличить пропорциональную составляющую и повторить пункт первый. Продолжать эту процедуру до начала автоколебательного процесса. 3. Уменьшать эту составляющую до стабильности системы. 4. Выставить значение пропорциональной составляющей на 15 % ниже устойчивого. 5. Выставить ступенчато-максимальное значение скорости с помощью изменения интегральной составляющей. 6. Обычно дифференциальный регулятор в настройке не нуждается. 7. Проверить стабильность системы. Применение подобных устройств в технике весьма широко, используют их практически в любой сфере человеческой деятельности. Так, например, ПИД-регулятор температуры присутствует в электрочайнике или в персональном компьютере (в ПК он нужен для регулировки скорости вращения вентиляторов при увеличении температуры процессора). www.syl.ruПИД-регулятор — полное описание, применение. Схема пид регулятор
ПИД - регулятор. Основы автоматики на примере.


 Здесь хочется сразу добавить, что ОУ может управляться по трем основным принципам:1. Принцип разомкнутого управления – вырабатывается на основе заданного алгоритма и не контролируется другими факторами.2. Принцип компенсации возмущений, где результат возмущения в виде корректива вносится в алгоритм управления.3. Принцип управления по ошибке. Здесь коррективы вносятся в алгоритм управления по фактическому значению выходной величины.
Здесь хочется сразу добавить, что ОУ может управляться по трем основным принципам:1. Принцип разомкнутого управления – вырабатывается на основе заданного алгоритма и не контролируется другими факторами.2. Принцип компенсации возмущений, где результат возмущения в виде корректива вносится в алгоритм управления.3. Принцип управления по ошибке. Здесь коррективы вносятся в алгоритм управления по фактическому значению выходной величины.

 Где в свойствах мотора выставим:— минимальную массу ротора EffectiveMass= 0,01;— нагрузка ротора Load/MaxTorque % = 1, чтобы он по инерции не крутился;— обороты ZeroLoad RPM=20;— количество импульсов на оборот PulsesperRevolution=24.Как видите в протеусе отдельного энкодера нет, только с двигателем. Кратко о его подключении. Один конец двигателя на землю, на второй напряжение от -12 или +12 В. И три вывода энкодера. Мы используем один как на рисунке выше. Приведенные параметры являются настроечными параметрами от которых будет зависеть динамика привода, т.е. его поведение.
Где в свойствах мотора выставим:— минимальную массу ротора EffectiveMass= 0,01;— нагрузка ротора Load/MaxTorque % = 1, чтобы он по инерции не крутился;— обороты ZeroLoad RPM=20;— количество импульсов на оборот PulsesperRevolution=24.Как видите в протеусе отдельного энкодера нет, только с двигателем. Кратко о его подключении. Один конец двигателя на землю, на второй напряжение от -12 или +12 В. И три вывода энкодера. Мы используем один как на рисунке выше. Приведенные параметры являются настроечными параметрами от которых будет зависеть динамика привода, т.е. его поведение.

 где K0 - коэффициент усиления регулятора. Скорость изменения выхода И-регулятора пропорциональна ошибке регулирования. Обычно на практике усилительные свойства И-регулятора характеризуют временем изодрома.
где K0 - коэффициент усиления регулятора. Скорость изменения выхода И-регулятора пропорциональна ошибке регулирования. Обычно на практике усилительные свойства И-регулятора характеризуют временем изодрома.

 ПИ-регулятор. Изодромное управление. Управляющее устройство вырабатывает суму двух сигналов — пропорционального ошибке и пропорционального интегралу от ошибки. Выходной сигнал ПИ-регулятора ( u (t) ) зависит и от ошибки регулирования ( e (t) ), и от интеграла от этой ошибки. K1 - коэффициент усиления пропорциональной части,K0 - коэффициент усиления интегральной части
ПИ-регулятор. Изодромное управление. Управляющее устройство вырабатывает суму двух сигналов — пропорционального ошибке и пропорционального интегралу от ошибки. Выходной сигнал ПИ-регулятора ( u (t) ) зависит и от ошибки регулирования ( e (t) ), и от интеграла от этой ошибки. K1 - коэффициент усиления пропорциональной части,K0 - коэффициент усиления интегральной части 1. Предел пропорциональности d=1/K1.2. Время изодрома Ти=1/K0.3. Время предварения Тд=K2.
1. Предел пропорциональности d=1/K1.2. Время изодрома Ти=1/K0.3. Время предварения Тд=K2.принцип работы, схемы, примеры и т.д.
 ПИД-регуляторОбратите внимание на теорию автоматического регулирования и на приборы для регулирования.
ПИД-регуляторОбратите внимание на теорию автоматического регулирования и на приборы для регулирования. Принцип действия ПИД-регулятора
Где применяется ПИД-регулятор
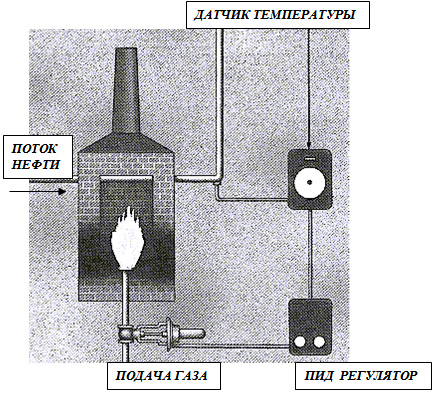 Газовая печь для подогрева нефти
Газовая печь для подогрева нефтиCoDeSyS ПИД регулятор - регулирование с помощью ПЛК
Как работает ПИД-регулятор?

Описание библиотеки для CoDeSyS
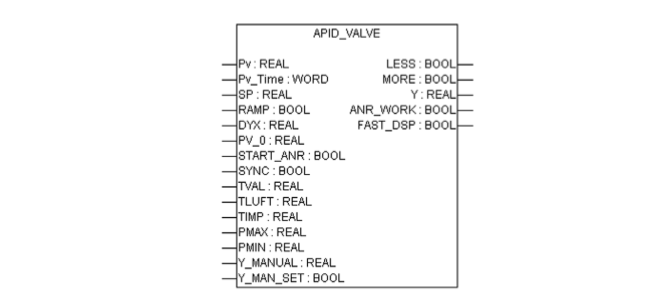
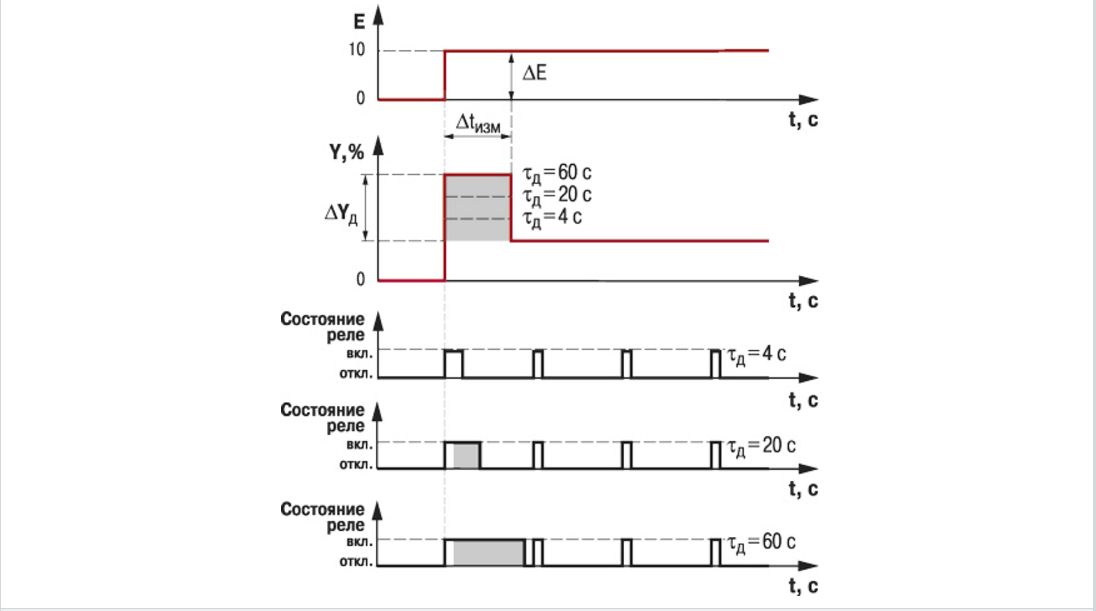
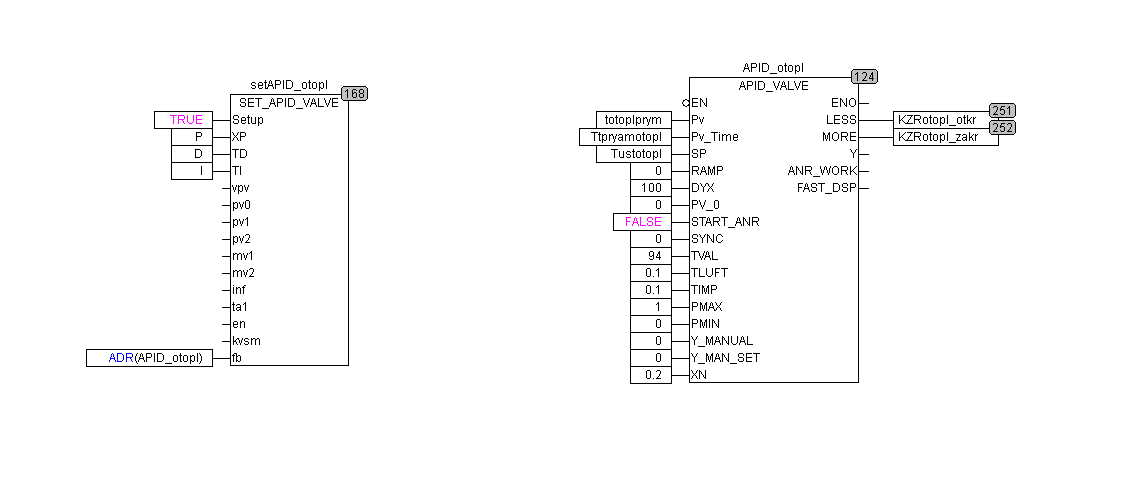
Переменные Тип данных Пояснения PV REAL Значение измеренного параметра PV_Time WORD Время замера параметра PV 1\100 c. SP REAL Уставка регулятора RAMP BOOL Разрешение быстрого выхода на уставку DYX REAL Порог включения режима быстрого выхода на уставку, задает величину изменения пользователем уставки, при превышении которой происходит автоматическое включение БВУ PV_0 REAL Начальное значение регулируемого параметра или значение параметра при нулевой мощности управляющего сигнала START_ANR BOOL SYNC BOOL Установка положения задвижки через вход PV. При установке значения TRUE положение задвижки (в диапазоне от 0 до 1) считывается из входа PV и сохраняется во внутренней переменной функционального блока TVAL REAL Время полного хода исполнительного механизма, в секундах TLUFT REAL Время выборки люфта исполнительного механизма, в секундах TIMP REAL Минимальная длительность импульса управляющего сигнала, в секундах PMAX REAL Максимальная мощность управляющего сигнала, возможные значения: –1…1 PMIN REAL Минимальная мощность управляющего сигнала, возможные значения: –1…1. Примечание. При отсутствии физических ограничителей на ИМ (например, концевых переключателей) рекомендуется устанавливать: для «охладителя» PMIN = –1, PMAX = 0, для «нагревателя» PMIN = 0, PMAX = 1. При наличии физических ограничителей на ИМ рекомендуется устанавливать значения PMIN и PMAX, соответствующие крайним возможным положениям ИМ Y_MANUAL REAL Приращение мощности управляющего сигнала в режиме РУЧНОЕ УПРАВЛЕНИЕ к значению мощности, которая была при включении ручного управления, возможные значения: –1…1 Y_MAN_SET BOOL Режим РУЧНОЕ УПРАВЛЕНИЕ, возможные значения: 0 – выключен, 1 – включен. Примечание. При выключении режима РУЧНОЕ УПРАВЛЕНИЕ (Y_MAN_SET = 0) происходит безударный переход в режим РЕГУЛИРОВАНИЕ, т. е. выдаваемая регулятором мощность управляющего сигнала будет направлена на достижение заданной уставки Переменные Тип данных Пояснения LESS BOOL Сигнал на закрытие, возможные значения: 0 – выключено, 1 – включено MORE BOOL Сигнал на открытие, возможные значения: 0 – выключено, 1 – включено Y REAL Мощность управляющего сигнала в диапазоне PMIN…PMAX ANR_WORK BOOL Признак выполнения АНР, возможные значения: 0 – АНР не выполняется, 1 – АНР выполняется FAST_DSP BOOL Признак режима быстрого выхода на уставку, возможные значения: 0 – БВУ не выполняется, 1 – БВУ выполняется Рабочая схема ПИД-регулятора
ПИД регулирование в частотных преобразователях. Настройка
Настраивание ПИД-регулятора общего вида

Регулятор пропорционального типа

Регулятор интегрального типа

Регулятор дифференциального типа

Работа регулятора в обратном и прямом действии
Настраивание ПИД-регулятора
Настраивание датчика на 20 миллиампер ПИД-регулированием
1. Действия в программном меню

2. Настраивание характеристик электромотора и определение направления момента
3. Подсоединение датчика (выход на 20 миллиампер)


4. Контроль обратной связи

5.Как настраивать значение параметра ПИД-регулирования.
Пример установки значения:
Пример использования регулирования ПИД
Данные
Наружные подключения

Обратная связь
Отградуированная характеристика датчика

Сигнал связи обратного вида в масштабе
Формула вычисления параметра PR10-01.
Величина значения ПИД (установленная частота).
PR10-01 (наибольшая частота).
Наименьшая частота.
Наклон и перемещение опции преобразования.
Величина уставки.
Установка значения уставки.
Интервал частоты выхода.
ПИД-регулирование
Настройка ПИД-регулятора
Зачем настраивать ПИД-регулятор
Метод настройки по отклику
Метод с максимальным коэффициентом усиления
Общие рекомендации для настроек ПИД-регуляторов
ПИД-регулятор- полное описание, применение




Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад если вы найдете на моем сайте еще что-нибудь полезное.
описание, состав, настройка :: SYL.ru
Из чего состоит ПИД-регулятор
Настройка ПИД-регулятора
Заключение

интернет-магазин светодиодного освещения
Пн - Вс с 10:30 до 20:00
Санкт-Петербург, просп. Энгельса, 138, корп. 1, тк ''Стройдвор''









Поделиться с друзьями: