
Мощность, потребляемая двигателем из сети, определяется по формуле Р1 = √3 U1I1cos φ1. Часть этой мощности (рис. 10.16) теряется в обмотке статора: ΔРобм1 = 3 I12r1, а часть, ΔРст1, составляет потери в сердечнике статора от перемагничивания и вихревых токов. Мощность, передаваемая вращающимся магнитным полем ротору, называется электромагнитной мощностью и составляет Рэм = P1 - ΔРобм1 - ΔРст1 = 3Е2кI2 cos ψ2. Часть электромагнитной мощности теряется в обмотке ротора: ΔРобм2 = 3 I22r2, а часть, ΔРст2, составляет потери в сердечнике ротора от гистерезиса и перемагничивания. Мощность, преобразуемая в механическую, равна Рмех = Рэм - ΔРобм2 - ΔРст2. Небольшая часть механической мощности теряется на трение в подшипниках ротора о воздух и вентиляцию. Мощность, развиваемая двигателем на валу, Рв = Рмех - ΔРмех . Все потери мощности, кроме вентиляционных, которые представляют собой затраты мощности на продувание воздуха внутри двигателя с целью лучшего охлаждения, превращаются в теплоту и нагревают двигатель. Известно, что мощность равна произведению момента на частоту вращения: Р = Мω. Механическая мощность, развиваемая двигателем, равна произведению электромагнитного момента на частоту вращения ротора. Мэмω = Рмех. Синхронная скорость w0 и критическое скольжение, а также форма характеристики сохраняются. Изменится величина скорости при МН, однако, это изменение будет незначительным. Уменьшение напряжения приводит к значительному снижению перегрузочной способности lМ, но снижается и ток холостого хода. При U1=UHOM магнитная цепь АД насыщена. Увеличение U1 при f=const приводит при равных условиях к быстрому увеличению тока намагничивания. Т. к. у двигателей нормального исполнения ток холостого хода превышение U1 на (20¸30)% может увеличить I0 до значений, превышающих I1H, и двигатель может нагреваться сверх допустимой температуры даже при отсутствии полезной нагрузки. Введение добавочного активного и индуктивного сопротивления в цепь статора. Для ограничения величины пускового тока к. з. АД иногда в цепь статора вводят добавочное активное или индуктивное сопротивления. При этом уменьшаются критический момент и критическое скольжение в двигательном режиме. Скорость, соответствующая критическому скольжению, несколько возрастает. Семейства механических характеристик для этих случаев изображены на рисунках. Введение в цепь статора добавочных сопротивлений вызывает понижение напряжения на его зажимах и уменьшает броски тока и пускового момента, что важно для смягчения ударов в передачах. Правда, в добавочном активном сопротивлении теряется часть энергии, а введение добавочного индуктивного сопротивления уменьшает коэффициент мощности двигателя. Различают следующие виды паразитных моментов: а) асинхронные моменты, создаваемые высшими гармоническими моментами. б) синхронные моменты, возникающие при определенной скорости и при определенном соотношении между числами пазов статора и ротора Zx и Z2 и в) вибрационные моменты, обусловленные также неблагоприятным соотношением чисел пазов Zj и Z2. Асинхронные паразитные моменты На этом основании мы можем рассчитывать асинхронные моменты, создаваемые высшими гармоническими моментами. Действие паразитных асинхронных моментов зависит от направления вращения гармонической моментов. создает двигательный момент, а во второй зоне — М\ генераторный, и, следовательно, тормозящий. Двигательный момент гармонической складывается с основным моментом, а генераторный вычитается из него. studfiles.net Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД асинхронного двигателя η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const. Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 — s). Скольжение s = Pэ2/Pэм, то есть скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n2 ≈ n1. По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0,01 — 0,08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2′ угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2′ возрастают электрические потери в роторе. Зависимость М2 = f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ω2 = 60 P2/(2πn2) = 9,55Р2/n2, где Р2 — полезная мощность, Вт; ω2 = 2πf2/60 — угловая частота вращения ротора. Из этого выражения следует, что если n2 = const, то график М2 = f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 = f (P2) имеет криволинейный вид. Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного двигателя I1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода. Объясняется это тем, что ток холостого хода электродвигателя I0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I1 ≈ I0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ1 ≈ φ0), лишь немногим меньше 90°. Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80 — 0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cos φ1 что объясняется возрастанием индуктивного сопротивления ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе. В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ1, целесообразно подводимое к двигателю напряжение U1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя. www.mtomd.info Номинальная мощность (кВт, Pn) двигателя указывает его номинальную эквивалентную механическую выходную мощность. Полная мощность (кВА, Ра), подаваемая на двигатель, зависит от полной мощности, КПД двигателя и коэффициента мощности: Полный ток нагрузки Ia, подаваемый на двигатель, рассчитывается по следующим формулам: где Ia : полный ток (А) Pn : номинальная мощность (кВт)U : междуфазное напряжение для 3-фазного двигателя и напряжение между зажимами для 1-фазного двигателя (В). 1-фазные двигатели могут подсоединяться на фазное или линейное напряжениеη : КПД, т.е. выходная мощность (кВт)/ входная мощность (кВт)cos φ : коэффициент мощности, т.е. входная мощность (кВт)/входная мощность(кВА) Хотя рынок предлагает двигатели с высоким КПД, на практике их пусковые токи приблизительно такие же, как у стандартных двигателей. Применение пускателей с соединением треугольником, статических устройств для плавного пуска или регулируемых приводов позволяет снизить значение пускового тока (например, 4 Ia вместо 7,5 Ia). Как правило, по техническим и финансовым соображениям выгоднее снижать ток, подаваемый на асинхронные двигатели. Это может обеспечиваться за счет применения конденсаторов, без влияния на выходную мощность двигателей. Применение этого принципа для оптимизации работы асинхронных двигателей называется «повышением коэффициента мощности» или «компенсацией реактивной мощности». Как обсуждается в Главе Компенсация реактивной мощности и фильтрация гармоник, полная мощность (кВА), подаваемая на двигатель, может значительно снижаться путем использования параллельно подключенных конденсаторов. Снижение входной полной мощности означает соответствующее снижение входного тока (так как напряжение остается постоянным). Компенсация реактивной мощности особенно рекомендуется для двигателей с длительными периодами работы при пониженной мощности. Как указывается выше, Поэтому, снижение входной полной мощности (кВА) приводит к увеличению (т.е. улучшению) значения cos φ. Ток, подаваемый на двигатель, после компенсации реактивной мощности рассчитывается по формуле: где: cos φ – коэффициент мощности до компенсации, cos φ’ – коэффициент мощности после компенсации, Ia – исходный ток. Рис. A4 ниже показывает (в зависимости от номинальной мощности двигателя) стандартные значения тока для нескольких значений напряжения питания. Рис. A4 : Номинальная мощность и токи ru.electrical-installation.org РАБОТА ПО ЭЛЕКТРОТЕХНИКЕ "Рабочие характеристики асинхронного двигателя" Введение Асинхронная электрическая машина – это электрическая машина переменного тока, у которой частота вращения ротора не равна частоте вращения магнитного поля статора и зависит от нагрузки. Используется в основном как двигатель и как генератор. Статор имеет пазы, в которые укладывается одно- или многофазная (чаще трёхфазная) обмотка, подключаемая к сети переменного тока. Эта обмотка предназначена для создания подвижного магнитного поля, вращающегося кругового- у трёхфазных и пульсирующего или вращающегося эллиптического-у однофазных машин. Ротор – вращающаяся часть электрической машины, предназначен также для создания магнитного поля, которое, взаимодействуя с полем статора, ведёт к созданию электромагнитного вращающего момента, определяющего направление преобразования энергии. У генераторов этот момент носит тормозной характер, противодействуя вращающему моменту первичного двигателя, приводящего в движение ротор. У двигателей, наоборот, этот момент является движущим, преодолевающим сопротивление приводимого во вращение ротором механизма. Асинхронный генератор-это асинхронная электрическая машина, работающая в генераторном режиме. Вспомогательный источник электрического тока небольшой мощности и тормозное устройство (в электроприводе). Асинхронный электродвигатель – это асинхронная электрическая машина, работающая в двигательном режиме. Наиболее распространен трехфазный асинхронный электродвигатель (изобретен в 1889 М.О. Доливо-Добровольским). Асинхронные электродвигатели отличаются относительной простотой конструкции и надежностью в эксплуатации, однако имеют ограниченный диапазон частоты вращения и низкий коэффициент мощности при малых нагрузках. Мощность от долей Вт до десятков МВт. 1. Асинхронный двигатель 1.1 Частота вращения магнитного поля и ротора Пусть n 1 – частота вращения магнитного поля. Многофазная система переменного тока создаёт вращающееся магнитное поле, частота вращения которого в минуту n1=60f1/p, где f1 – частота тока, p – число пар полюсов, образуемых каждой фазой статорной обмотки. n 2 – частота вращения ротора. Если ротор вращается с частотой не равной частоте вращения магнитного поля (n2≠n1), то такая частота называется асинхронной. В асинхронном двигателе рабочий процесс может протекать только при асинхронной частоте. При работе частота вращения ротора всегда меньше частоты вращения поля. ( n 2< n 1) 1.2 Принцип действия асинхронного двигателя В асинхронных двигателях вращающееся магнитное поле создаётся трёхфазной системой при включении её в сеть переменного тока. Вращающееся магнитное поле статора пересекает проводники обмотки ротора и индуцирует в них э.д.с. Если обмотка ротора замкнута на какое-либо сопротивление или накоротко, то в ней под действием индуцируемой э.д.с. проходит ток. В результате взаимодействия тока в обмотке ротора с вращающимся магнитным полем обмотки статора создаётся вращающий момент, под действием которого ротор начинает вращаться по направлению вращения магнитного поля. Для изменения направления вращения ротора необходимо поменять местами по отношению к зажимам сети любые два из трёх проводов, соединяющих обмотку статора с сетью. 1.3 Устройство асинхронного двигателя Сердечник статора набирается из стальных пластин, толщиной 0,35 или 0,5 мм. Пластины штампуют с пазами и крепят в станине двигателя. Станину устанавливают на фундаменте. В продольные пазы статора укладывают проводники его обмотки, которые соединяют между собой так, что образуется трёхфазная система. Для подключения обмоток статора к трёхфазной сети они могут быть соединены звездой или треугольником. Это даёт возможность включить двигатель в сеть с разным напряжением. Для более низких напряжений (220/127 В) обмотка статора соединяется треугольником, для более высоких (380/220 В) – звездой. Сердечник ротора также набирают из стальных пластин толщиной 0,5 мм. Пластины штампуют с пазами и собирают в пакеты, которые крепят на валу машины. Из пакетов образуется цилиндр с продольными пазами, в которых укладывают проводники обмотки ротора. В зависимости от типа обмотки ротора асинхронные машины могут быть с фазным и короткозамкнутым ротором. В короткозамкнутую обмотку нельзя включить сопротивление. В Фазной обмотке проводники соединены между собой, образуя трёхфазную систему. Обмотки трёх фаз соединены звездой. Обмотку ротора можно замкнуть на сопротивление или накоротко. Двигатели с короткозамкнутым ротором проще и дешевле, однако двигатели с фазным ротором обладают лучшими пусковыми и регулировочными свойствами (они используется при больших мощностях). Мощность асинхронных двигателей колеблется от нескольких десятков Ватт до 15000 кВт при напряжении обмотки статора до 6 кВ. Недостаток асинхронных двигателей – низкий коэффициент мощности. 1.4 Работа асинхронного двигателя под нагрузкой n 1 – частота вращения магнитного поля статора. n 2 – частота вращения ротора. n 1 > n 2 Магнитное поле статора вращается в том же направлении, что и ротор и скользит относительно ротора с частотой n s = n 1 – n 2 Отставание ротора от вращающегося магнитного поля статорахарактеризуется скольжениемS = n s / n 1, => S = ( n 1 – n 2) / n 1 Если ротор неподвижен, тоn 2 =0, S = ( n 1 – n 2) / n 1, => S = n 1 / n 1 =1 Если ротор вращается синхронно с магнитным полем, то скольжение S= 0. При холостом ходе, то есть при отсутствии нагрузки на валу двигателя скольжение ничтожно мало и его можно принять равным 0. Нагрузкой на валу ротора может служить, например резец токарного станка. Он создаёт тормозной момент. При равенстве вращающего и тормозного момента двигатель будет работать устойчиво. Если нагрузка на валу увеличилась, то тормозной момент станет больше вращающего и частота вращения ротора n 2 уменьшится. Согласно формулеS = ( n 1 – n 2) / n 1 скольжение увеличится. Так как магнитное поле статора скользит относительно ротора с частотой n s = n 1 – n 2, то оно будет пересекать проводники ротора чаще, в них увеличится ток и двигательный вращающий момент, который вскоре станет равным тормозному. При уменьшении нагрузки, тормозной момент становится меньше вращающего, увеличивается n 2 и уменьшаетсяS . Уменьшается Э.Д.С и ток ротора и вращающий момент вновь равен тормозному. Магнитный поток в воздушном зазоре машины при любом изменении нагрузки остаётся примерно постоянным. 2. Рабочие характеристики асинхронного двигателя Рабочие характеристики асинхронного двигателя есть зависимость S – скольжения n2 – частоты вращения ротора М – развиваемого момента I1-потребляемого тока Р1-расходуемой мощности СОSφ-коэффициента мощности КПДη От полезной мощности Р2 на валу машины. Эти характеристики снимаются при естественных условиях. Частота тока f1 и напряжение U1 остаются постоянными. Изменяется только нагрузка на валу двигателя. При увеличении нагрузки на валу двигателя S увеличивается. При холостом ходе двигателя n2≈n1, и S≈0. При номинальной нагрузке скольжение обычно составляет от 3 до 5%. При увеличении нагрузки на валу двигателя частота вращения n2 уменьшается. Однако, изменение частоты вращения при увеличении нагрузки от 0 до номинальной очень незначительны и не превышают 5%. Поэтому, скоростная характеристика асинхронного двигателя является жёсткой. Кривая имеет очень малый наклон к горизонтальной оси. Вращающий момент М , развиваемый двигателем, уравновешен тормозным моментом на валу Мт и моментом М 0 , идущим на преодоление механических потерь, то есть М= Мт + М 0 =Р 2 /Ω 2 + М 0 , где Р 2 – полезная мощность двигателя, Ω 2 -угловая скорость ротора. При холостом ходе М= М 0. С увеличением нагрузки вращающий момент также увеличивается, причём за счёт некоторого уменьшения частоты вращения ротора увеличение вращающего момента происходит быстрее, чем полезной мощности на валу. Ток I1, потребляемый двигателем из сети неравномерно изменяется с увеличением нагрузки на валу двигателя. При холостом ходе СОSφ-коэффициента мощности – мал. И ток имеет большую реактивную составляющую. При малых нагрузках на валу двигателя активная составляющая тока статора меньше реактивной составляющей, поэтому активная составляющая тока незначительно влияет на ток I1. При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает значительное изменение тока I1. Графическая зависимость потребляемой двигателем мощности Р1 изображается почти прямой линией, незначительно отклоняющейся вверх при больших нагрузках, что объясняется увеличением потерь в обмотках статора и ротора с возрастанием нагрузки. Зависимость СОSφ-коэффициента мощности – от нагрузки на валу двигателя следующая. При холостом ходе СОSφ мал, порядка 0,2. Так как активная составляющая тока статора, обусловленная потерями мощности в машине, мала по сравнению с реактивной составляющей этого тока, создающей магнитный поток. При увеличении нагрузки на валу СОSφ возрастает, достигая наибольшего значения 0,8–0,9, в результате увеличения активной составляющей тока статора. При очень больших нагрузках происходит некоторое уменьшение СОSφ, так как в следствие значительного увеличения скольжения и частоты тока в роторе возрастает реактивное сопротивление обмотки ротора. Кривая КПДη имеет такой же вид как в любой машине или трансформаторе. При холостом ходе КПД=0. С увеличением нагрузки на валу двигателя КПД резко увеличивается, а затем уменьшается. Наибольшего значения КПД достигает при такой нагрузке, когда потери мощности в стали и механические потери, не зависящие от нагрузки, равны потери мощности в обмотках статора и ротора, зависящим от нагрузки. mirznanii.com Высокоскоростная черта n2 = f(P2). Частота вращения ротора асинхронного мотора n2 = n1(1 — s). Скольжение s = Pэ2/Pэм, т. е. скольжение асинхронного мотора, а как следует, и его частота вращения определяются отношением электронных утрат в роторе к электрической мощности. Пренебрегая электронными потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а потому s ≈ 0 и n20 ≈ n1. По мере роста нагрузки на валу асинхронного мотора отношение s = Pэ2/Pэм вырастает, достигая значений 0,01 — 0,08 при номинальной нагрузке. В согласовании с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Но при увеличении активного сопротивления ротора мотора r2′ угол наклона этой кривой возрастает. В данном случае конфигурации частоты асинхронного мотора n2 при колебаниях нагрузки Р2 растут. Разъясняется это тем, что с повышением r2′ растут электронные утраты в роторе. Рис. 1. Рабочие свойства асинхронного мотора мотора Зависимость М2 =f(P2). Зависимость полезного момента на валу асинхронного мотора М2 от полезной мощности Р2 определяется выражением M2 = Р2/ ω2 = 60 P2/ (2πn2) = 9,55Р2/ n2, где Р2 — нужная мощность, Вт; ω2 = 2πf 2/ 60 — угловая частота вращения ротора. Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую линию. Но в асинхронном движке с повышением нагрузки Р2 частота вращения ротора миниатюризируется, а потому нужный момент на валу М2 с повышением нагрузки растет не сколько резвее нагрузки, а как следует, график М2 =f (P2) имеет криволинейный вид. Рис. 2. Векторная диаграмма асинхронного мотора при маленький нагрузке Зависимость cos φ1 = f (P2). В связи с тем что ток статора асинхронного мотора I1 имеет реактивную (индуктивную) составляющую, нужную для сотворения магнитного поля в статоре, коэффициент мощности асинхронных движков меньше единицы. Меньшее значение коэффициента мощности соответствует режиму холостого хода. Разъясняется это тем, что ток холостого хода электродвигателя I0 при хоть какой нагрузке остается фактически постоянным. Потому при малых нагрузках мотора ток статора невелик и в значимой части является реактивным (I1 ≈ I0). В итоге сдвиг по фазе тока статора относительно напряжения выходит значимым (φ1 ≈ φ0), только немногим меньше 90° (рис. 2). Коэффициент мощности асинхронных движков в режиме холостого хода обычно не превосходит 0,2. При увеличении нагрузки на валу мотора вырастает активная составляющая тока I1 и коэффициент мощности растет, достигая большего значения (0,80 — 0,90) при нагрузке, близкой к номинальной. Предстоящее повышение нагрузки на валу мотора сопровождается уменьшением cos φ1 что разъясняется возрастанием индуктивного сопротивления ротора (x2s) за счет роста скольжения, а как следует, и частоты тока в роторе. В целях увеличения коэффициента мощности асинхронных движков очень принципиально, чтоб движок работал всегда либо по последней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить только при правильном выборе мощности мотора. Если же движок работает значительную часть времени недогруженным, то для увеличения cos φ1, целенаправлено подводимое к движку напряжение U1 уменьшить. К примеру, в движках, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в раз. При всем этом магнитный поток статора, а как следует, и намагничивающий ток уменьшаются приблизительно в раз. Не считая того, активная составляющая тока статора несколько возрастает. Все это содействует увеличению коэффициента мощности мотора. На рис. 3 представлены графики зависимости cos φ1, асинхронного мотора от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2). Рис. 3. Зависимость cos φ1,от нагрузки при соединении обмотки статора мотора звездой (1) и треугольником (2) Смотрите также: Все про асинхронные электродвигатели elektrica.info Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения Скоростная характеристика Рис. 62. Рабочие характеристики асинхронного двигателя Скольжение по (13.5) Зависимость где: Рис. 63. Векторная диаграмма асинхронного двигателя при большой нагрузке Из этого выражения следует, что если Зависимость Рис. 64. Зависимость звездой (1) и треугольником (2) При увеличении нагрузки на валу двигателя растет активная составляющая тока Рабочие характеристики асинхронного двигателя (стр. 1 из 2). Мощность асинхронного двигателя
47.Электромагнитная мощность и момент асинхронного двигателя.
48.Механическая характеристика при изменениях напряжения и сопротивления ротора.
1. При изменении подводимого к двигателю напряжения изменяется момент, т. К. Он пропорционален квадрату напряжения.
49.Паразитные моменты асинхронного двигателя.
Рабочие характеристики асинхронного двигателя | мтомд.инфо
Расчет рабочих характеристик асинхронного двигателя
Рабочие характеристики асинхронного двигателя

Характеристики асинхронных двигателей — Руководство по устройству электроустановок
Потребление тока

 x U x η x cosφ)
x U x η x cosφ) Сверхпереходный ток и уставка защиты
Пусковой ток двигателя
Компенсация реактивной мощности (квар), подаваемой на асинхронные двигатели


кВт л.с. 230 B 380 - 415 B 400 B 440 - 480 B 500 B 690 B A A A A A A 0,180,250,37 --- 1,01,51,9 --- 0,60,851,1 --- 0,480,680,88 0,350,490,64 -0,55- 1/2-3/4 -2,6- 1,3-1,8 -1,5- 1,1-1,6 - 1,2- -0,87- -0,751,1 1-- -3,34,7 2,3-- -1,92,7 2,1-- -1,52,2 -1,11,6 --1,5 1-1/22- --6,3 3,34,3- --3,6 3,03,4- --2,9 --2,1 2,2-3,0 -3- 8,5-11,3 -6,1- 4,9-6,5 -4,8- 3,9- 5,2 2,8-3,8 3,745,5 --- -1520 -9,7- -8,511,5 -7,6- -6,89,2 -4,96,7 --7,5 7-1/210- --27 14,018,0- --15,5 11,014,0- --12,4 --8,9 11-- -1520 38,0-- -27,034,0 22,0-- -21,027,0 17,6-- 12,8-- 1518,5- --25 5161- --44 3935- --34 2328- 1721- 22-- -3040 72-- -5166 41-- -4052 33-- 24-- 3037- --50 96115- --83 5566- --65 4453- 3239- -4555 60-- -140169 103-- -8097 77-- -6478 -4757 --75 75100- --230 128165- --132 96124- --106 --77 90-110 -125- 278-340 -208- 160-195 -156- 128-156 93-113 -132- 150-200 -400- 240-320 -230- 180-240 -184- -134- 150160185 --- -487- --- -280- --- -224- -162- -200220 250-- -609- 403-- -350- 302-- -280- -203- -250280 300-- -748- 482-- -430- 361-- -344- -250- --300 350400- --- 560636- --- 414474- --- --- 315-335 - 540- 940-- - - - 540-- - 515- 432-- 313-- 355-375 -500- 1061- - -786- 610-- - 590- 488-- 354-- 400425450 -- - 1200- - -- - 690- - -- - 552- - 400-- 475500530 -- - -1478- -- - -850- --- -680- -493- 560600630 -- - 1652- 1844 -- - 950-1060 -- - 760-848 551-615 670710 750 -- - -2070- - -- -1190- -- - -952- -690- 800850 900 -- - 2340- 2640 -- - 1346- 1518 -- - 1076- 1214 780- 880 950 1000 -- - 2910 -- -1673 -- -1339 -970 Рабочие характеристики асинхронного двигателя
Рабочие характеристики асинхронного двигателя | Онлайн журнал электрика
 Рабочие свойства асинхронного мотора представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const.
Рабочие свойства асинхронного мотора представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const. 



Рабочие характеристики асинхронного двигателя
 , КПД
, КПД  , полезного момента (момента на валу)
, полезного момента (момента на валу)  , коэффициента мощности
, коэффициента мощности  и тока статора
и тока статора  от полезной мощности
от полезной мощности  при
при  и
и  .
. . Частота вращения ротора асинхронного двигателя
. Частота вращения ротора асинхронного двигателя

 , (13.24) т. е. скольжение двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности
, (13.24) т. е. скольжение двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности  . Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять
. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять  , а поэтому
, а поэтому  и
и  . По мере увеличения нагрузки на валу двигателя отношение (13.24) растет, достигая значений 0,01-0,08 при номинальной нагрузке. В соответствии с этим зависимость представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора
. По мере увеличения нагрузки на валу двигателя отношение (13.24) растет, достигая значений 0,01-0,08 при номинальной нагрузке. В соответствии с этим зависимость представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора  угол наклона этой кривой увеличивается. В этом случае изменения частоты вращения при колебаниях нагрузки возрастают. Объясняется это тем, что с увеличением возрастают электрические потери в роторе [см. (13.3)].
угол наклона этой кривой увеличивается. В этом случае изменения частоты вращения при колебаниях нагрузки возрастают. Объясняется это тем, что с увеличением возрастают электрические потери в роторе [см. (13.3)]. . Зависимость полезного момента на валу двигателя от полезной мощности Р2 определяется выражением
. Зависимость полезного момента на валу двигателя от полезной мощности Р2 определяется выражением , (13.25)– полезная мощность, Вт;
, (13.25)– полезная мощность, Вт;  – угловая частота вращения ротора.
– угловая частота вращения ротора.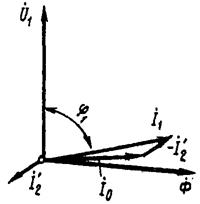
 , то график
, то график  представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки частота вращения ротора уменьшается, а поэтому полезный момент на валу с увеличением нагрузки возрастает несколько быстрее нагрузки, а следовательно, график имеет криволинейный вид.
представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки частота вращения ротора уменьшается, а поэтому полезный момент на валу с увеличением нагрузки возрастает несколько быстрее нагрузки, а следовательно, график имеет криволинейный вид. . В связи с тем что ток статора имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму х.х. Объясняется это тем, что ток х.х.
. В связи с тем что ток статора имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму х.х. Объясняется это тем, что ток х.х.  при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным
при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным  . В результате сдвиг по фазе тока статора
. В результате сдвиг по фазе тока статора  относительно напряжения
относительно напряжения  получается значительным
получается значительным  , лишь немногим меньше 90° (рис. 63). Коэффициент мощности асинхронных двигателей в режиме х.х. обычно не превышает 0,2.
, лишь немногим меньше 90° (рис. 63). Коэффициент мощности асинхронных двигателей в режиме х.х. обычно не превышает 0,2. , от нагрузки при соединении обмотки статора и коэффициент мощности возрастает, достигая наибольшего значения (0,80—0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки сопровождается уменьшением , что объясняется возрастанием индуктивного сопротивления ротора
, от нагрузки при соединении обмотки статора и коэффициент мощности возрастает, достигая наибольшего значения (0,80—0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки сопровождается уменьшением , что объясняется возрастанием индуктивного сопротивления ротора  за счет увеличения скольжения, а следовательно, и частоты тока в роторе. В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения целесообразно подводимое к двигателю напряжение
за счет увеличения скольжения, а следовательно, и частоты тока в роторе. В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя. Если же двигатель работает значительную часть времени недогруженным, то для повышения целесообразно подводимое к двигателю напряжение  уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в
уменьшить. Например, в двигателях, работающих при соединении обмотки статора треугольником, это можно сделать пересоединив обмотки статора в звезду, что вызовет уменьшение фазного напряжения в  раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерное раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя. На рис. 64 представлены графики зависимости асинхронного двигателя от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2).
раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерное раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя. На рис. 64 представлены графики зависимости асинхронного двигателя от нагрузки при соединении обмоток статора звездой (кривая 1) и треугольником (кривая 2).Похожие статьи:
poznayka.org
Компенсация реактивной мощности асинхронных двигателей
Расположение КБ и уставки защиты
| Индивидуальная компенсация рекомендуется для двигателей большой мощности (кВА) по отношению к заявленной мощности установки. |
Общие замечания
Из-за малого потребления активной мощности коэффициент мощности двигателя крайне низкий при холостом ходе или при малой нагрузке. Реактивный ток двигателя остается практически постоянным при всех нагрузках, так что на ряд ненагруженных двигателей приходится потребление реактивной мощности, которое лишь негативно сказывается на установке по причинам, описанным в предыдущих разделах.
Поэтому два хороших правила состоят в том, что ненагруженные двигатели следует отключать, а номинальные мощности двигателей не должны завышаться (поскольку это снизит их загрузку).
Соединение
КБ должна подключаться непосредственно к зажимам двигателя.
Специальные двигатели
Не рекомендуется применять компенсацию для специальных двигателей (шаговых, реверсивных и т.д.).
Влияние на уставки защиты
После применения компенсации для двигателя ток блока «двигатель-конденсатор» станет меньше, чем до компенсации при том же режиме нагрузки двигателя. Это вызвано тем, что значительная часть реактивной составляющей тока двигателя подается от конденсатора, как показано на рис. L23.
Если максимальная токовая защита двигателя расположена до соединения двигателя и конденсатора (это всегда так в случае подсоединения конденсаторов к зажимам), уставки реле защиты должны уменьшаться на отношение:
cos φ до компенсации/cos φ после компенсации
Для двигателей с компенсацией в соответствии со значениями квар, показанными на рис. L24 (максимальные значения, рекомендуемые для предотвращения самовозбуждения стандартных асинхронных двигателей, как обсуждается в подразделе Методы предотвращения самовозбуждения асинхронного двигателя), величины указанного выше отношения приведены для различных скоростей на рис. L25.
Рис. L23 : До компенсации трансформатор пропускает всю реактивную мощность, после компенсации конденсатор подает большую часть реактивной мощности
| 22 | 30 | 6 | 8 | 9 | 10 |
| 30 | 40 | 7,5 | 10 | 11 | 12,5 |
| 37 | 50 | 9 | 11 | 12,5 | 16 |
| 45 | 60 | 11 | 13 | 14 | 17 |
| 55 | 75 | 13 | 17 | 18 | 21 |
| 75 | 100 | 17 | 22 | 25 | 28 |
| 90 | 125 | 20 | 25 | 27 | 30 |
| 110 | 150 | 24 | 29 | 33 | 37 |
| 132 | 180 | 31 | 36 | 38 | 43 |
| 160 | 218 | 35 | 41 | 44 | 52 |
| 200 | 274 | 43 | 47 | 53 | 61 |
| 250 | 340 | 52 | 57 | 63 | 71 |
| 280 | 380 | 57 | 63 | 70 | 79 |
| 355 | 482 | 67 | 76 | 86 | 98 |
| 400 | 544 | 78 | 82 | 97 | 106 |
| 450 | 610 | 87 | 93 | 107 | 117 |
Рис. L24 : Максимальное значение квар индивидуальной компенсации реактивной мощности без риска самовозбуждения двигателя
| 750 | 0,88 |
| 1000 | 0,90 |
| 1500 | 0,91 |
| 3000 | 0,93 |
Рис. L25 : Коэффициент уменьшения для максимально токовой защиты после компенсации
Методы предотвращения самовозбуждения асинхронного двигателя
| Если КБ подсоединяется к зажимам асинхронного двигателя, важно проверить, что его номинальное значение меньше значения, при котором возможно самовозбуждение. |
Двигатель с высокоинерционной нагрузкой будет продолжать вращаться (если специально не затормаживается) после отключения его питания.
«Магнитная инерция» цепи ротора означает создание ЭДС в обмотке статора на короткий период времени после отключения, которая уменьшиться до нуля через 1 или 2 периода в случае двигателя без компенсации.
Однако, подключенные конденсаторы создают трехфазную реактивную нагрузку для такой затухающей ЭДС, которая вызывает емкостные токи в обмотке статора. Такие токи в статоре создают вращающееся магнитное поле, которое действует точно по той же оси и в том же направлении, что и затухающее электромагнитное поле.
Как следствие, поток ротора увеличивается, токи статора увеличиваются, и напряжение на зажимах двигателя повышается иногда до опасно высокого уровня. Это явление известно как самовозбуждение и является одной из причин того, почему генераторы переменного тока, как правило, не работают при опережающих коэффициентах мощности, т.е. имеется тенденция к спонтанному (и неконтролируемому) самовозбуждению.
Примечания:
1. Характеристики двигателя, приводимого в движение инерцией нагрузки, не являются строго идентичными его характеристикам холостого хода. Однако, данное предположение является достаточно точным с практической точки зрения.
2. В двигателе, действующем в качестве генератора, циркулирующие токи являются в основном реактивными, так что эффект торможения (замедления) двигателя вызван главным образом только нагрузкой, представленной его охлаждающим вентилятором.
3. Ток (угол отставания почти 90°), потребляемый от источника питания ненагруженным двигателем в нормальных условиях, и ток (угол опережения почти 90°), подаваемый на конденсаторы двигателем, выступающим в качестве генератора, имеют одинаковое фазовое соотношение с напряжением на зажимах. Именно поэтому две характеристики могут налагаться на один график.
Для предотвращения самовозбуждения, как описывается выше, номинальная мощность (квар) блока конденсаторов должна ограничиваться следующим максимальным значением:
 , где Io - ток холостого хода двигателя и Un - межфазное номинальное напряжение двигателя (кВ). На рис. L24 приводятся значения Qc, соответствующие данному критерию.
, где Io - ток холостого хода двигателя и Un - межфазное номинальное напряжение двигателя (кВ). На рис. L24 приводятся значения Qc, соответствующие данному критерию.
Пример:
Трехфазный двигатель, 75 кВт, 3000 об./мин, 400 В, может иметь блок конденсаторов не выше 17 квар согласно рис. L24. Табличные значения, как правило, слишком малы для соответствующей компенсации двигателя до нормально требуемого уровня cos φ. Однако, дополнительная компенсация может осуществляться, например, с помощью КБ централизованной компенсации, установленной на шинах ТП.
Высокоинерционные двигатели и/или нагрузки
В любой установке с высокоинерционными нагрузками, приводимыми в действие двигателями, выключатели или контакторы, управляющие такими двигателями, должны быстро отключаться в случае полной потери электропитания.
Если не принять такой меры предосторожности, велика вероятность возникновения крайне высоких напряжений (из-за самовозбуждения), поскольку все другие КБ работают в сети параллельно с конденсаторами высокоинерционных двигателей.
Поэтому схема защиты таких двигателей должна содержать реле отключения по максимальному напряжению вместе с реле контроля обратной мощности (двигатель подает питание на остальное оборудование до рассеяния полученной инерциальной энергии).
Если мощность конденсаторов индивидуальной компенсации высокоинерционного двигателя, больше, чем рекомендованная на рис. L24, они должны управляться отдельно с помощью выключателя или контактора, который осуществляет отключение вместе с главным выключателем или контактором двигателя, как показано на рис. L26.
Включение главного контактора осуществляется после включения конденсаторов.
Рис. L26 : Подсоединение блока конденсаторов к двигателю
ru.electrical-installation.org












Поделиться с друзьями: