ГлавнаяСхемаСхема пуска асинхронного двигателя с короткозамкнутым ротором
45. Схемы пуска асинхронного двигателя с короткозамкнутым ротором. Схема пуска асинхронного двигателя с короткозамкнутым ротором
§ 15.2. Пуск двигателей с короткозамкнутым ротором
Пуск непосредственным включением в сеть (рис. 15.3). Этот способ пуска, отличаясь простотой, имеет существенный недостаток: в момент подключения двигателя к сети в обмотке статора возникает большой пусковой ток, в 5—7 раз превышающий номинальный ток двигателя. При небольшой инерционности исполнительного механизма частота вращения двигателя быстро достигает установившегося значения и пусковой ток также быстро спадает, не вызывая перегрева обмотки статора. Но такой значительный бросок тока в питающей сети может вызвать в ней заметное падение напряжения. Однако этот способ пуска благодаря своей простоте получил наибольшее применение для двигателей
Рис. 15.3. Схема непосредственного включения в сеть (а) и графики изменения тока и момента при пуске (б) асинхронного двигателя с короткозамкнутым ротором
мощностью до 38—50 кВт и более (при достаточном сечении жил токоподводящего кабеля). При необходимости уменьшения пускового тока двигателя применяют какой-либо из способов пуска короткозамкнутых двигателей при пониженном напряжении.
Пуск при пониженном напряжении. В соответствии с (15.1) пусковой ток двигателя пропорционален подведенному напряжению U1, уменьшение которого вызывает соответствующее уменьшение пускового тока. Существует несколько способов понижения подводимого к двигателю напряжения. Рассмотрим некоторые из них.
Для асинхронных двигателей, работающих при соединении обмоток статора треугольником, можно применить пуск переключением обмотки статора со звезды на треугольник (рис. 15.4, а). В момент подключения двигателя к сети переключатель ставят в положение «звезда», при котором обмотка статора оказывается соединенной в звезду. При этом фазное напряжение на статоре понижается в раз. Во столько же раз уменьшается и ток в фазных обмотках двигателя (рис. 15.4, б). Кроме того, при соединении обмоток звездой линейный ток равен фазному, в то время как при соединении этих же обмоток треугольником линейный ток больше фазного в раз. Следовательно, переключив обмотки статора звездой, мы добиваемся уменьшения линейного тока в ()2 = 3 раза.
Рис. 15.4. Схема включения (а) и графики изменения момента и тока (фазного) при пуске (б) асинхронного двигателя с короткозамкнутым ротором переключением обмотки статора со звезды на треугольник
После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, переключатель быстро переводят в положение «треугольник» и фазные обмотки двигателя оказываются под номинальным напряжением. Возникший при этом бросок тока до значения I/пΔ является незначительным.
Рассмотренный способ пуска имеет существенный недостаток - уменьшение фазного напряжения в раз сопровождается уменьшением пускового момента в три раза, так как, согласно (13.19), пусковой момент асинхронного двигателя прямо пропорционален квадрату напряженияU1. Такое значительное уменьшение пускового момента не позволяет применять этот способ пуска для двигателей, включаемых в сеть при значительной нагрузке на валу.
Описанный способ понижения напряжения при пуске применим лишь для двигателей, работающих при соединении обмотки статора треугольником. Более универсальным является способ с понижением подводимого к двигателю напряжения посредством реакторов (реактивных катушек — дросселей). Порядок включения двигателя в этом случае следующий (рис. 15.5, а). При разомкнутом рубильнике 2 включают рубильник 7. При этом ток из сети поступает в обмотку статора через реакторы Р, на которых происходит падение напряжения jхр (где хр — индуктивное сопротивление реактора, Ом). В результате на обмотку статора подается пониженное напряжение
После разгона ротора двигателя включают рубильник 2 и подводимое к обмотке статора напряжение оказывается номинальным.
Недостаток этого способа пуска состоит в том, что уменьшение напряжения в U/1/ U1ном
Рис. 15.5. Схемы реакторного (а) и автотрансформаторного (б) способов пуска асинхронных двигателей с короткозамкнутым ротором
раз сопровождается уменьшением пускового момента Мп в (U/1/ U1ном)2 раз.
При пуске двигателя через понижающий автотрансформатор (рис. 15.5, б) вначале замыкают рубильник 1, соединяющий обмотки автотрансформатора звездой, а затем включают рубильник 2 и двигатель оказывается подключенным на пониженное напряжение U/1 . При этом пусковой ток двигателя, измеренный на выходе автотрансформатора, уменьшается в КА раз, где КА — коэффициент трансформации автотрансформатора. Что же касается тока в питающей двигатель сети, т. е. тока на входе автотрансформатора, то он уменьшается в К2А раз по сравнению с пусковым током при непосредственном включении двигателя в сеть. Дело в том, что в понижающем автотрансформаторе первичный ток меньше вторичного в КА раз и поэтому уменьшение пускового тока при автотрансформаторном пуске составляет КАКА = К2А раз. Например, если кратность пускового тока асинхронного двигателя при непосредственном его включении в сеть составляет Iп/I1ном = 6 , а напряжение сети 380 В, то при автотрансформаторном пуске с понижением напряжения до 220 В кратность пускового тока в сети I/п/I1ном = 6/ (380/220)2 = 2 .
После первоначального разгона ротора двигателя рубильник 1 размыкают и автотрансформатор превращается в реактор. При этом напряжение на выводах обмотки статора несколько повышается, но все же остается меньше номинального. Включением рубильника 3 на двигатель подается полное напряжение сети. Таким образом, автотрансформаторный пуск проходит тремя ступенями: на первой ступени к двигателю подводится напряжение U1= (0,50÷0,60)U1ном, на второй —U1= (0,70÷0,80)U1номи, наконец, на третьей ступени к двигателю подводится номинальное напряжениеU1ном.
Как и предыдущие способы пуска при пониженном напряжении, автотрансформаторный способ пуска сопровождается уменьшением пускового момента, так как значение последнего прямо пропорционально квадрату напряжения. С точки зрения уменьшения пускового тока автотрансформаторный способ пуска лучше реакторного, так как при реакторном пуске пусковой ток в питающей сети уменьшается в U/1/ U1ном раз, а при автотрансформаторном - в (U/1/ U1ном)2 раз. Но некоторая сложность пусковой операции и повышенная стоимость пусковой аппаратуры (понижающий автотрансформатор и переключающая аппаратура) несколько ограничивают применение этого способа пуска асинхронных двигателей.
studfiles.net
22 Пуск трехфазных асинхронных двигателей с фазным и короткозамкнутым ротором.
Самым простым способом пуска асинхронных двигателей является прямое включение их в сеть. Однако при этом в момент пуска в цепи двигателя возникает большой пусковой ток, который значительно превышает номинальный. В маломощной сети этот ток может вызвать кратковременное понижение напряжения, что отражается на работе других потребителей энергии, включенных в эту сеть. Поэтому непосредственным включением в сеть запускают только двигатели малой мощности. При запуске двигателя большой мощности необходимо уменьшить пусковой ток. Для уменьшения пускового тока используют ряд способов. Рассмотрим некоторые из них.
Запуск двигателей с фазным ротором
Запуск двигателя с фазным ротором уже был кратко рассмотрен в разд. 8.5, а применяемая для этого схема включения изображена на рис. 8.7. Двигатели данного типа обладают очень хорошими пусковыми характеристиками. Для уменьшения пускового тока обмотка ротора замыкается на пусковой реостат. При включении реостата в цепь обмотки ротора ток в этой обмотке уменьшается, а следовательно, уменьшается и ток в обмотке статора, а также ток, потребляемый двигателем от сети.
Таким образом, при включении активного сопротивления в цепь ротора уменьшается пусковой ток и увеличивается пусковой момент. После достижения ротором нормальной скорости реостат полностью выводится, т. е. обмотка ротора замыкается накоротко.
Запуск двигателей с короткозамкнутым ротором
Для уменьшения пускового тока можно на время понизить напряжение на зажимах статора, включив для этого
последовательно с его обмоткой трехфазное индуктивное сопротивление (рис. 8.9).
При пуске замыкается рубильник Р1, и к обмоткам статора последовательно подключаются индуктивности. Это значительно уменьшает пусковой ток.
Когда скорость двигателя приближается к номинальной, замыкается рубильник Р2 — он закорачивает катушки индуктивности, и статор включается на полное напряжение сети. Уменьшение пускового тока, вызванное понижением напряжения на статоре, вызывает уменьшение пускового момента пропорционального квадрату напряжения на статоре. Например, при таком пуске уменьшение пускового тока в 2 раза будет сопровождаться уменьшением пускового момента в 4 раза. Для понижения напряжения на статоре вместо индуктивных сопротивлений можно использовать активные сопротивления реостатов, но это менее выгодно, так как связано с дополнительными потерями энергии в реостатах.
Мощные двигатели часто запускают с помощью автотрансформатора (рис. 8.10).
Следовательно, понижение напряжения автотрансформатором в к раз уменьшает пусковой ток в сети в к2 раз. В то же время пусковой момент, пропорциональный квадрату напряжения, уменьшается в k2 раз. Таким образом, благодаря применению автотрансформатора начальный вращающий момент уменьшается пропорционально линейному пусковому току, тогда как при поглощении части напряжения сопротивлением момент уменьшается пропорционально квадрату пускового тока.
Понижение напряжения на статоре на время пуска можно осуществить также посредством временного переключения обмоток статора, нормально работающих при соединении треугольником, на соединение звездой. При пуске обмотки статора соединяются звездой, благодаря чему фазное
напряжение уменьшается в корень из 3-х раз. Во столько же раз уменьшается и фазный пусковой ток:
Таким образом, переключение на звезду уменьшает пусковой линейный ток в 3 раза:
Практически такое переключение выполняется с помощью простого трехполюсного переключателя (рис. 8.11),
Этот способ запуска может быть применен для двигателя, обмотки статора которого при питании от сети данного напряжения нормально должны быть соединены треугольником.
Общим недостатком способов запуска асинхронных двигателей понижением напряжения на статоре и переключением обмоток статора со звезды на треугольник является значительное снижение пускового момента, который пропорционален квадрату фазного напряжения. Поэтому все эти способы запуска можно использовать только в тех случаях, когда двигатель запускается не под полной нагрузкой.
Реверсирование — это изменение направления вращения ротора двигателя. Как известно, направление вращения ротора зависит от направления вращения магнитного поля статора, поэтому для изменения направления вращения ротора следует изменить последовательность фаз (см. разд. 8.3). На практике это осуществляется путем перемены мест любых двух фаз. Для этого часто используют трехполюсные переключатели (рис. 8.12):
studfiles.net
45. Схемы пуска асинхронного двигателя с короткозамкнутым ротором.
Наиболее простым способом пуска двигателя с короткозамкнутым ротором является включение обмотки его статора непосредственно в сеть, на номинальное напряжение обмотки статора (рис. 28-1, а). Такой пуск называется прямым.
Рис. 28-1. Схемы способов пуска двигателей с короткозамкнутым ротором: а — прямой; б — реакторный; в — автотрансформаторный; г — с переключением со звезды на треугольник
46.Пуск двигателя с фазным ротором.
Одной из разновидностей асинхронного двигателя является двигатель с фазным ротором. На практике данный двигатель довольно часто применяется, благодаря улучшенным пусковым свойствам и характеристикам.
Устройство асинхронного двигателя с фазным ротором
Как и у АД с короткозамкнутым ротором, сердечник его статора набирается из листов электротехнической стали, а затем спрессовывается. В пазы сердечника укладываются фазные обмотки, концы которых затем выводятся в коробку, расположенную на корпусе двигателя.
Отличие заключается в роторе двигателя. Он также, как и статор набирается из листов стали, спрессовывается и в него набирается фазная обмотка. Причем число фаз ротора равно числу фаз статора, в то время как у короткозамкнутого, каждый стержень “беличьей клетки” образует отдельную фазу. Отсюда название – фазный ротор.
Концы фаз фазного ротора соединяются с контактными кольцами, которые расположены на валу ротора. В свою очередь, контактные кольца соприкасаются с графитовыми щетками, которые имеют выводы в коробку на корпусе, для возможности подключения дополнительного сопротивления. Это сопротивление в цепи ротора оказывает влияние на токи, протекающие в нем, а как следствие на его характеристики. При увеличении сопротивления цепи ротора, механическая характеристика становится более мягкой.
Влияние сопротивления сказывается и на пуске двигателя, а именно добавочное сопротивление позволяет осуществить более мягкий пуск, снизить пусковые токи и моменты и как следствие, снизить удары в механической части привода в момент пуска.
Как правило, используют переменное сопротивление, которое уменьшают с увеличением оборотов двигателя. Так как зачастую оно представляет из себя ступенчатый реостат, то и пуск двигателя осуществляется тоже ступенчато.
Для увеличения КПД двигателя и сохранения целостности щеток в конструкции двигателя предусматривается специальное щеткоснимательное устройство, которое убирает щетки после пуска. КПД повышается за счет того, что на щетках падает часть напряжения.
Таким образом, преимуществом асинхронного двигателя с фазным ротором является возможность пуска под нагрузкой, но недостатком является более сложная конструкция, а также его дороговизна по сравнению с двигателем с короткозамкнутым ротором. Короткозамкнутый кроме того, является более простым и надежным, не требует дополнительных устройств.
47. Регулирование скорости вращения асинхронного двигателя с фазным ротором.
Частота вращения ротора равна
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов
Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потерив цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому,механическая характеристикадвигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания
Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда - звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.
studfiles.net
2. Пуск ад с короткозамкнутым ротором может быть:
Прямым включением в сеть. При этом пуске кратность пускового тока достигает (5 ÷ 7) Iном По этому этот пуск может применяться для двигателей малой и средней мощности при мощной сети питания. Если сеть не большой мощности, то при данном пуске происходит понижение напряжения сети, что отрицательно сказывается на работе других двигателей.
Пуск при пониженном напряжении реализуется:
а) путем переключения обмоток статора со схем Δ на в момент пуска. При этом напряжение уменьшается в раз, а момент и ток в 3 раза.
б) введением в цепь статора реактора или автотрансформатора.
При разомкнутом рубильнике 2 включают рубильник1. При этом ток из сети поступает в обмотку статора через реакторыР, на которых происходит падение напряженияjInxp (гдехр — индуктивное сопротивление реактора, Ом). В результате на обмотку статора подается пониженное напряжениеU’1=Uном –jInxp. После разгона ротора двигателя включают рубильник2и подводимое к обмотке статора напряжение оказывается номинальным.
Недостаток этого способа пуска состоит в том, что уменьшение напряжения вU’1/Uномраз сопровождается уменьшением пускового моментаМпв (U’1/Uном)2раз.
Рис. 15.5. Схемы реакторного (а) и автотрансформаторного (б) и с тиристорным регулятором напряжения (в ) в цепи статора.
При пуске двигателя через понижающий автотрансформатор (рис. 15.5, б) вначале замыкают рубильник 1, соединяющий обмотки автотрансформатора звездой, а затем включают рубильник2и двигатель оказывается подключенным на пониженное напряжениеU’1. При этом пусковой ток двигателя, измеренный на выходе автотрансформатора, уменьшается вКAраз, гдеКA— коэффициент трансформации автотрансформатора. Что же касается тока в питающей двигатель сети, т. е. тока на входе автотрансформатора, то он уменьшается вКA2раз по сравнению с пусковым током при непосредственном включении двигателя в сеть. Дело в том, что в понижающем автотрансформаторе первичный ток меньше вторичного вКAраз и поэтому уменьшение пускового тока при автотрансформаторном пуске составляетКAКA=КA2раз. Например, если кратность пускового тока асинхронного двигателя при непосредственном его включении в сеть составляет Iп/I1ном = 6, а напряжение сети 380 В, то при автотрансформаторном пуске с понижением напряжения до 220 В кратность пускового тока в сетиI’п/I1ном = 6/(380/220)2= 2.
После первоначального разгона ротора двигателя рубильник 1размыкают и автотрансформатор превращается в реактор. При этом напряжение на выводах обмотки статора несколько повышается, но все же остается меньше номинального. Включением рубильника3на двигатель подается полное напряжение сети. Таким образом, автотрансформаторный пуск проходит тремя ступенями: на первой ступени к двигателю подводится напряжение U1= (0,50÷0,60) U1ном, на второй —U1= (0,70÷0,80) U1номи, наконец, на третьей ступени к двигателю подводится номинальное напряжениеU1ном.
Как и предыдущие способы пуска при пониженном напряжении, автотрансформаторный способ пуска сопровождается уменьшением пускового момента, так как значение последнего прямопропорционально квадрату напряжения. С точки зрения уменьшения пускового тока автотрансформаторный способ пуска лучше реакторного, так как при реакторном пуске пусковой ток в питающей сети уменьшается в U’1/Uномраз, а при автотрансформаторном — в (U’1/Uном)2раз. Но некоторая сложность пусковой операции и повышенная стоимость пусковой аппаратуры (понижающий автотрансформатор и переключающая аппаратура) несколько ограничивают применение этого способа пуска асинхронных двигателей.
studfiles.net
2 11 1 Способы пуска АД с короткозамкнутым ротором
2.11.1. Способы пуска АД с короткозамкнутым ротором
Прямой пуск. Это наиболее простой способ пуска. Обмотка статора включается непосредственно в сеть на номинальное напряжение (рис.2.14).
| 
Рис. 2.14 |
Пусковой ток равен  .
.
Прямой пуск возможен, когда сеть мощная и пусковой ток АД не вызывает недопустимо больших падений напряжения в сети (не более  ).
).
Три способа пуска при пониженном напряжении. Они применяются, если по условию допустимого падения напряжения в сети прямой пуск невозможен, и обладают одинаковым недостатком – уменьшением пускового момента ( ).
).
Поэтому эти способы реализуются, когда возможен пуск АД на холостом ходу или под неполной нагрузкой, что чаще встречается у мощных высоковольтных двигателей.
Реакторный пуск (рис.2.15). Сначала включается В1. Напряжение
| 
Рис.2.15 |
подается на обмотку статора через трехфазный реактор Р, поэтому обмотка статора запитана пониженным напряжением. Сопротивление реактора xp выбирается таким образом, чтобы напряжение на фазе обмотки статора было не менее 65% номинального.
После достижения АД установившейся частоты вращения включается выключатель В2, который шунтирует реактор Р, в результате чего на клеммы обмотки статора подается полное напряжение сети, равное номинальному напряжению обмотки статора.
Пусковой ток при реакторном пуске равен  и уменьшился по сравнению с пусковым током при прямом пуске в
и уменьшился по сравнению с пусковым током при прямом пуске в  раз.
раз.
Во столько же раз уменьшается напряжение на клеммах обмотки статора в начальный момент пуска.
Начальный пусковой момент при реакторном пуске  уменьшается по сравнению с начальным пусковым моментом при прямом пуске
уменьшается по сравнению с начальным пусковым моментом при прямом пуске  в
в  раз.
раз.
В приведенных соотношениях не учитывается изменение величины  при пуске. При необходимости это нетрудно сделать.
при пуске. При необходимости это нетрудно сделать.
Автотрансформаторный пуск (рис.2.16). Сначала включаются В1 и
| 
Рис.2.16 |
В2 и на обмотку статора АД через автотрансформатор АТ подается пониженное до  напряжение.
напряжение. После достижения АД установившейся частоты вращения выключатель В2 отключается и на обмотку статора подается напряжение через часть обмотки АТ, который в этом случае работает как реактор. Затем включается В3, и на клеммы обмотки статора подается полное напряжение сети, равное номинальному напряжению обмотки статора.
Если пусковой автотрансформатор понижает пусковое напряжение АД в  раз (- коэффициент трансформации автотрансформатора), то пусковой ток АД и ток на низкой стороне автотрансформатора уменьшатся также в раз. Пусковой момент MП, пропорциональный квадрату напряжения на клеммах обмотки статора АД, уменьшится в
раз (- коэффициент трансформации автотрансформатора), то пусковой ток АД и ток на низкой стороне автотрансформатора уменьшатся также в раз. Пусковой момент MП, пропорциональный квадрату напряжения на клеммах обмотки статора АД, уменьшится в  раз.
раз.
Пусковой ток на высокой стороне автотрансформатора и ток в сети уменьшатся также в раз.
Таким образом, при автотрансформаторном пуске пусковой момент АД и пусковой ток в сети уменьшаются в одинаковое число раз. При реакторном пуске пусковой ток АД является также пусковым током в сети, а пусковой момент MП уменьшается быстрее пускового тока. Поэтому при одинаковых значениях пускового тока в сети при автотрансформаторном пуске пусковой момент будет больше.
Несмотря на это преимущество автотрансформаторного пуска перед реакторным, достигнутое ценой значительного усложнения и удорожания пусковой аппаратуры, этот пуск применяется реже реакторного в том случае, когда реакторный пуск не обеспечивает необходимого пускового момента.
Пуск переключением “звезда-треугольник” (рис.2.17).
| 
Рис.2.17 |
Этот способ пуска ранее широко применялся при пуске низковольтных АД, но в связи с увеличением мощности сетей потерял свое прежнее значение, используется сравнительно редко. Для его применения необходимо, чтобы были выведены все шесть клемм обмотки статора, линейное напряжение сети равно номинальному фазному напряжению обмотки статора.
В первый момент пуска обмотка статора соединена в “звезду”, а при достижении устойчивой частоты вращения схема соединения обмотки изменяется переключателем П на “треугольник”.
При таком способе пуска на фазы обмотки статора подается напряжение уменьшенное в раз по сравнению с номинальным, пусковой момент уменьшается в 3 раза, пусковой ток в фазах уменьшается в  раз, а пусковой ток в сети в 3 раза. Таким образом, рассматриваемый способ пуска равноценен автотрансформаторному пуску при
раз, а пусковой ток в сети в 3 раза. Таким образом, рассматриваемый способ пуска равноценен автотрансформаторному пуску при  , однако при пусковых переключениях возникают коммутационные перенапряжения в обмотке статора АД.
, однако при пусковых переключениях возникают коммутационные перенапряжения в обмотке статора АД.
2.11.2. Пуск АД с фазным ротором
| 
Рис. 2.18 
Рис. 2.19 |
В цепь обмотки ротора включается пусковой реостат, который имеет обычно несколько ступеней и рассчитывается на кратковременное протекание тока, рис.2.18. Начальный пусковой момент может быть увеличен до максимального момента двигателя  при определенном сопротивлении пускового реостата
при определенном сопротивлении пускового реостата  , рис.2.19. Величину сопротивления пускового реостата
, рис.2.19. Величину сопротивления пускового реостата  можно определить приравняв критическое скольжение единице, т.е.
можно определить приравняв критическое скольжение единице, т.е.

Приведенное активное сопротивление фазы пускового реостата  .
.
Действительное сопротивление пускового реостата  .
.
Обычно выбирают . По мере увеличения частоты вращения ротора сопротивление пускового реостата уменьшают, переходя с одной его ступени на другую. Ступени пускового реостата рассчитывают так, чтобы при переключениях вращающий момент превышал статический момент.
. По мере увеличения частоты вращения ротора сопротивление пускового реостата уменьшают, переходя с одной его ступени на другую. Ступени пускового реостата рассчитывают так, чтобы при переключениях вращающий момент превышал статический момент.
2.12. Регулирование частоты вращения АД
Частота вращения ротора АД  . Из этого выражения следует, что частоту вращения ротора можно регулировать изменением какой-либо из трех величин: скольжения s, частоты тока в обмотке статора f1, числа полюсов обмотки статора 2p.
. Из этого выражения следует, что частоту вращения ротора можно регулировать изменением какой-либо из трех величин: скольжения s, частоты тока в обмотке статора f1, числа полюсов обмотки статора 2p.
Регулирование частоты вращения изменением скольжения происходит только у нагруженного АД. В режиме холостого хода скольжение, а следовательно и частота вращения ротора остаются практически неизменными.
Оценку любого способа регулирования частоты вращения производят по следующим показателям:
1. Возможному диапазону регулирования;
2. Плавности регулирования;
3. Изменению КПД привода при регулировании.
Регулирование частоты вращения изменением подводимого напряжения. Вращающий момент АД пропорционален U12, поэтому механические характеристики двигателя при напряжениях меньших номинального (рис.2.20) располагаются ниже естественной.
Если статический момент MСТ остается постоянным, то при снижении напряжения на обмотке статора скольжение АД увеличивается, частота вращения ротора уменьшается.
| 
Рис. 2.20 |
Регулирование скольжения этим способом возможно в пределах  .
. Диапазон регулирования частоты вращения получается небольшим, что объясняется узкой зоной устойчивой работы двигателя. Диапазон ограничен недопустимостью значительного превышения номинального напряжения и значением критического скольжения.
С превышением номинального напряжения возникает опасность чрезмерного нагрева АД, вызванного резким увеличением электрических и магнитных потерь. Двигатель с более значительным критическим скольжением имеет большее значение электрических потерь, а значит и меньший КПД.
С уменьшением напряжения U1 двигатель утрачивает перегрузочного способность и при нагрузках близких к номинальной происходит увеличение суммарных потерь и нагрева АД.
Узкий диапазон регулирования и неэкономичность ограничивают область применения этого способа регулирования частоты вращения.
Регулирование частоты вращения нарушением симметрии подводимого напряжения. При нарушении симметрии трехфазной системы переменного напряжения, подводимой к АД, вращающееся магнитное поле статора становится эллиптическим. Такое поле содержит обратную составляющую (встречное поле), которая создает момент  , направленный встречно вращающему моменту MПР, поэтому результирующий электромагнитный момент АД уменьшается:
, направленный встречно вращающему моменту MПР, поэтому результирующий электромагнитный момент АД уменьшается:
 .
.
Механические характеристики двигателя в этом случае (рис.2.21,а) располагаются в интервале между характеристикой при симметричном напряжении (1) и характеристикой при однофазном питании (2) – пределом несимметрии трехфазного напряжения.

Рис. 2.21
Регулировка несимметрии подводимого напряжения обеспечивается включением в одну из фаз однофазного регулировочного автотрансформатора АТ (рис.2.21,б).
Недостатками этого способа регулирования являются узкий диапазон регулирования и уменьшение КПД двигателя при увеличении несимметрии напряжения. Обычно этот способ регулирования частоты вращения применяют лишь в двигателях малой мощности.
Регулирование частоты вращения изменением активного сопротивления в цепи ротора. Этот способ регулирования частоты вращения возможен лишь в АД с фазным ротором. В цепь ротора включается регулировочный реостат, подобный пусковому, но рассчитанный на длительный режим работы. В зависимости от конструкции регулировочного реостата этот способ регулирования частоты вращения может быть плавным или ступенчатым.
Механические характеристики АД при различных значениях активного сопротивления цепи ротора (рис.2.22) показывают, что с увеличением активного сопротивления цепи ротора возрастает скольжение, соответствующее заданному статическому моменту. Частота вращения ротора при этом уменьшается.

Рис. 2.22
Способ обеспечивает регулирование частоты вращения в широком диапазоне вниз от синхронной частоты вращения. Электрические потери в цепи ротора возрастают, но только из-за потерь в регулировочном реостате. Этот способ более благоприятный по сравнению с предыдущим, несмотря на снижение КПД двигателя.
Регулирование частоты вращения изменением частоты тока в обмотке статора (рис.2.23). Это способ регулирования основан на изменении синхронной частоты вращения  , что возможно при наличии источника питания АД с регулируемой частотой – преобразователя частоты (ПЧ). Частотное регулирование позволяет плавно изменять частоту вращения ротора в широком диапазоне (до 12:1).
, что возможно при наличии источника питания АД с регулируемой частотой – преобразователя частоты (ПЧ). Частотное регулирование позволяет плавно изменять частоту вращения ротора в широком диапазоне (до 12:1).
Чтобы регулировать частоту вращения, достаточно изменить частоту тока f1, но при этом будет изменяться и максимальный электромагнитный момент АД. Поэтому для сохранения неизменными перегрузочной способности, коэффициента мощности и КПД двигателя на требуемом уровне необходимо одновременно с изменением частоты f1 изменять и величину подводимого к обмотке статора напряжения U1.
| 
Рис. 2.23 |
Характер одновременного изменения f1 и U1 зависит от закона изменения момента нагрузки и определяется уравнением  ,
,
где  и
и  - напряжение и момент при частоте
- напряжение и момент при частоте  ;
;  и
и  - напряжение и момент при частоте
- напряжение и момент при частоте  .
.

Рис. 2.24
Если частота вращения ротора АД регулируется при постоянном моменте нагрузки ( ), то подводимое к обмотке статора напряжение необходимо изменять пропорционально изменению частоты тока (рис.2.24):
), то подводимое к обмотке статора напряжение необходимо изменять пропорционально изменению частоты тока (рис.2.24):
 .
.
При осуществлении этого закона регулирования основной магнитный поток АД при различных значениях частоты f1 остается неизменным, а мощность двигателя увеличивается пропорционально нарастанию частоты вращения.
Если регулирование производится при условии постоянства мощности двигателя ( ), то подводимое напряжение к обмотке статора следует изменять в соответствии с законом (рис.2.25)
), то подводимое напряжение к обмотке статора следует изменять в соответствии с законом (рис.2.25)

 Рис. 2.25
Рис. 2.25
Регулирование частоты вращения изменением числа полюсов обмотки статора. Этот способ регулирования частоты вращения обеспечивает ступенчатую регулировку. Изменять число полюсов обмотки статора можно либо укладкой в пазах статора двух обмоток с разным числом полюсов, либо укладкой одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов. Второй способ получил наибольшее применение.
Принцип преобразования четырехполюсной обмотки в двухполюсную на примере одной фазы показан на рис.2.26: а) при последовательном согласном соединении двух катушек создаваемое ими магнитное поле образует четыре полюса; б) при последовательном встречном соединении – два полюса; в) при параллельном соединении – два полюса.
АД с полюсно-переключаемыми обмотками могут работать в двух режимах: режим постоянного момента (рис.2.27), когда при переключении обмотки статора с одной полюсности на другую вращающий момент на валу двигателя M2 остается неизменным, а мощность P2 изменяется пропорционально частоте вращения ротора  ;
;

Рис. 2.26

Рис. 2.27
режим постоянной мощности (рис.2.28), когда при переключении обмотки статора с одной полюсности на другую мощность P2 остается примерно одинаковой, а момент на валу M2 изменяется соответственно изменению частоты вращения ротора  .
.
Регулирование частоты вращения изменением числа полюсов обмотки статора применяют только в АД с короткозамкнутым ротором, потому что в АД с фазным ротором пришлось бы и на роторе применить полюсно-переключаемую обмотку, а это привело бы к недопутимому усложнению двигателя.

Рис. 2.28
Регулирование частоты вращения введением в цепь ротора добавочной ЭДС. В цепь ротора вводят от постороннего источника добавочную ЭДС, имеющую частоту, одинаковую с основной ЭДС ротора, и направленную согласно или встречно с ней.
Учитывая, что скольжение АД относительно невелико, для упрощения происходящих процессов можно принять, что  ,
,  ,
,  . Рассматриваем работу АД при
. Рассматриваем работу АД при  .
.
Если  , то
, то  и
и  . В обмотке вращающегося ротора до введения добавочной ЭДС индуктируется ЭДС
. В обмотке вращающегося ротора до введения добавочной ЭДС индуктируется ЭДС  и протекает ток
и протекает ток  , создающий необходимый вращающий электромагнитный момент. Векторная диаграмма для рассматриваемой ситуации изображена на рис.2.29,а.
, создающий необходимый вращающий электромагнитный момент. Векторная диаграмма для рассматриваемой ситуации изображена на рис.2.29,а.
При введении в цепь вращающегося ротора добавочной ЭДС  , направленной встречно ЭДС
, направленной встречно ЭДС  , ток в обмотке ротора в первый момент времени уменьшится. В результате вращающий электромагнитный момент М станет меньше статического момента
, ток в обмотке ротора в первый момент времени уменьшится. В результате вращающий электромагнитный момент М станет меньше статического момента  , и ротор начнет замедлять свою частоту вращения.
, и ротор начнет замедлять свою частоту вращения.

Рис. 2.29
С уменьшением частоты вращения ротора будут увеличиваться скольжение, ЭДС и ток в обмотке ротора. Увеличение тока в обмотке ротора и уменьшение частоты вращения ротора будут происходить до тех пор пока этот ток при новом скольжении  не достигнет прежнего значения
не достигнет прежнего значения  , при котором выполнялось равенство моментов
, при котором выполнялось равенство моментов  . Новому значению частоты вращения ротора соответствует векторная диаграмма на рис.2.29,б.
. Новому значению частоты вращения ротора соответствует векторная диаграмма на рис.2.29,б.
Аналогично можно показать, что если в цепь ротора вводится добавочная ЭДС, направленная согласно с ЭДС  , то частота вращения ротора увеличивается.
, то частота вращения ротора увеличивается.
Таким образом, при наличии соответствующего источника (преобразователя частоты), включенного в цепь ротора, можно плавно и экономично регулировать частоту вращения ротора АД. Однако реализация этого способа требует более сложной системы управления, чем при регулировании частоты тока в обмотке статора.
ЛАБОРАТОРНЫЕ РАБОТЫ И КОНТРОЛЬНЫЕ ВОПРОСЫ ПО РАЗДЕЛУ «АСИНХРОННЫЕ МАШИНЫ»
1. Исследование асинхронного двигателя с короткозамкнутым ротором
Проводятся опыты холостого хода и короткого замыкания. Делается построение круговой диаграммы (КД) для получения рабочих характеристик.
КОНТРОЛЬНЫЕ ВОПРОСЫ ПРИ ЗАЩИТЕ
ЛАБОРАТОРНОЙ РАБОТЫ
Основные конструктивные элементы асинхронного двигателя (АД) и их назначение.
Назначение и принцип действия АД.
Изобразите электрическую схему для определения клемм, принадлежащих одной фазе.
Как маркируют клеммы фаз обмотки статора АД?
Как маркируют клеммы начал фаз обмотки статора АД?
Как маркируют клеммы концов фаз обмотки статора АД?
Как соединяются клеммы фаз обмотки статора АД при схеме неполный треугольник?
Как соединяются клеммы фаз обмотки статора АД при схеме неполная звезда?
Объясните, почему при соединении двух любых фаз в неполный треугольник и при подаче на них переменного напряжения будет наводиться ЭДС в третьей фазе?
Объясните, почему при соединении двух любых фаз в неполную звезду и при подаче на них переменного напряжения не будет наводиться ЭДС в третьей фазе?
Поясните, как осуществить реверс ротора АД?
Что такое холостой ход АД?
Величина скольжения АД на холостом ходу.
Какие потери и где возникают в АД на холостом ходу?
Как получить по результатам опыта холостого хода АД значение коэффициента мощности?
Что такое короткое замыкание АД?
Величина скольжения в первое мгновение пуска АД.
Какие потери и где возникают в АД при коротком замыкании?
Как получить по результатам опыта короткого замыкания значение коэффициента мощности?
Какие параметры схемы замещения АД и каким образом можно определить из опытов холостого хода и короткого замыкания?
Поясните выбор масштаба тока при построении КД.
Как определяется центр окружности токов КД?
Как определяется величина фазного тока обмотки статора по КД?
Как определяется величина приведенного фазного тока обмотки ротора по КД?
Как определяется местонахождение линии электромагнитных моментов КД?
Как определяется местонахождение линии полезных электромагнитных моментов КД?
Как выполняется шкала скольжений АД КД?
Какой диапазон скольжения характеризует двигательный режим работы асинхронной машины (АМ)?
Какой диапазон скольжения характеризует генераторный режим работы АМ?
Какой диапазон скольжения характеризует режим электромагнитного тормоза АМ?
Как по круговой диаграмме определить критическое скольжение АД.
К
11
ак определяется по КД частота вращения ротора АД? Как выполняется шкала коэффициента мощности АД КД?
Как определяется по КД коэффициент мощности АД?
Как рассчитывается масштаб моментов при выполнении КД?
Как определяется по КД величина электромагнитного момента?
Как определяется по КД величина максимального электромагнитного момента?
Как определяется по КД величина полезного момента АД?
Как рассчитывается масштаб мощности при выполнении КД?
Как определяется по КД коэффициент полезного действия АД?
Каким образом выбираются точки на окружности токов КД при построении рабочих характеристик АД?
Назовите потери, которые возникают в АД при работе под нагрузкой?
Каким образом приводят параметры АД к рабочей температуре обмоток?
Исследование асинхронного двигателя с фазным ротором
Осуществляется пуск двигателя с использованием пускового реостата. Получают и анализируют рабочие характеристики при номинальных значениях напряжения и частоты.
КОНТРОЛЬНЫЕ ВОПРОСЫПРИ ЗАЩИТЕ ЛАБОРАТОРНОЙ РАБОТЫ
Назовите конструктивные различия асинхронных двигателей с фазным и короткозамкнутым ротором.
Изобразите электрическую схему для исследования АД с фазным ротором и дайте необходимые пояснения.
Какие преимущества и недостатки имеет АД с фазным ротором по сравнению с короткозамкнутым?
Как осуществляется пуск АД с фазным ротором?
В цепь какой обмотки и для чего включают пусковой реостат?
Какой характер сопротивления пускового реостата и почему?
Почему при включении активного сопротивления в цепь ротора пусковой момент увеличивается, а пусковой ток уменьшается?
Почему после завершения пуска АД необходимо вывести полностью пусковой реостат из цепи обмотки?
Как рассчитывается скольжение АД?
Какими двумя способами можно определить величину скольжения АД?
П
12
очему колеблется стрелка магнитоэлектрического амперметра, включенного в цепь ротора под нагрузкой и на холостом ходу? Изобразите и поясните зависимость скольжения АД при изменении нагрузки на валу, запишите условия, при которых она получена.
Чему равна частота тока в обмотке ротора АД в первое мгновение пуска и что с ней происходит в процессе разгона?
Почему потери холостого хода АД называют постоянными?
Почему коэффициент мощности холостого хода АД не равен нулю?
Почему при увеличении нагрузки на валу АД увеличивается ток в обмотках ротора и статора?
Какие потери в АД называют постоянными и переменными?
Изобразите и поясните зависимость частоты вращения ротора АД при изменении нагрузки на валу, запишите условия, при которых она получена.
Изобразите и поясните зависимость потребляемой активной мощности АД при изменении нагрузки на валу, запишите условия, при которых она получена.
Изобразите и поясните зависимость коэффициента мощности АД при изменении нагрузки на валу, запишите условия, при которых она получена.
Изобразите и поясните зависимость коэффициента полезного действия (КПД) при изменении нагрузки на валу АД, запишите условия, при которых она выполняется.
Изобразите и поясните зависимость тока фазы обмотки статора при изменении нагрузки на валу, запишите условия, при которых она выполняется.
Как рассчитывается коэффициент мощности АД с фазным ротором по результатам исследований?
Как рассчитывается величина полезной активной мощности АД по результатам проводимых исследований?
Как рассчитывается величина коэффициента полезного действия АД по результатам исследований?
Почему не учитывают потери в магнитопроводе ротора АД при номинальной частоте вращения?
Когда АД работает с максимальным КПД?
Исследование асинхронного двигателя в трехфазном, конденсаторном и однофазном режимах
Получают и анализируют рабочие характеристики асинхронного двигателя при трех схемах включения обмотки статора.
КОНТРОЛЬНЫЕ ВОПРОСЫ ПРИ ЗАЩИТЕ ЛАБОРАТОРНОЙ РАБОТЫ
Изобразите электрическую схему исследования АД в трехфазном режиме и дайте необходимые пояснения.
Какое магнитное поле создается трехфазной обмоткой статора при питании синусоидальным симметричным напряжением?
Изобразите электрическую схему исследования АД в конденсаторном режиме и дайте необходимые пояснения.
Какое магнитное поле создается однофазной обмоткой статора при питании синусоидальным напряжением?
Изобразите электрическую схему исследования АД в однофазном режиме и дайте необходимые пояснения.
Когда АД в однофазном режиме не имеет начального пускового электромагнитного момента?
Что служит нагрузкой АД и каким образом ее можно менять?
Как определяется величина полезной мощности на валу при исследовании АД?
Как определяется скольжение при исследовании АД?
Как определяется полезный электромагнитный момент при исследовании АД?
В чем состоит отличие однофазного и конденсаторного режимов работы АД?
Назначение конденсаторов в конденсаторном режиме АД.
Назначение пускового конденсатора в однофазном и конденсаторном режимах работы АД.
Почему при пуске в однофазном и конденсаторном режимах АД используется в качестве фазосдвигающего элемента, как правило, конденсатор?
Почему АД в конденсаторном режиме пускается с двумя конденсаторами, а работает только с одним?
Что понимают под круговым, эллиптическим, пульсирующим магнитными полями?
В чем состоят недостатки применения трехфазного АД в однофазном режиме?
Назовите условия, при которых снимаются рабочие характеристики АД в трехфазном, однофазном и конденсаторном режимах.
Как определяется коэффициент мощности при исследовании АД в трехфазном режиме?
Как определяется коэффициент мощности при исследовании АД в конденсаторном режиме?
Как определяется коэффициент мощности при исследовании АД в однофазном режиме?
Почему коэффициент мощности в конденсаторном режиме АД выше, чем в однофазном при одинаковой нагрузке на валу?
Как определяется коэффициент полезного действия (КПД) при исследовании АД в трехфазном режиме?
Как определяется КПД при исследовании АД в конденсаторном режиме?
Как определяется КПД при исследовании АД в однофазном режиме?
Изобразите зависимости Р1=f(P2) в трехфазном, однофазном и конденсаторном режимах и поясните взаимное расположение кривых.
Изобразите зависимости n=f (P2) в трехфазном, однофазном и конденсаторном режимах АД и поясните взаимное расположение кривых.
Изобразите зависимости η=f(Р2) в трехфазном, однофазном и конденсаторном режимах АД и поясните взаимное расположение кривых.

gigabaza.ru
Пуск двигателей с короткозамкнутым ротором
⇐ ПредыдущаяСтр 77 из 111Следующая ⇒Пуск непосредственным включением в сеть(рис. 15.3). Этот способ пуска, отличаясь простотой, имеет существенный недостаток: в момент подключения двигателя к сети в обмотке статора возникает большой пусковой ток, в 5—7 раз превышающий номинальный ток двигателя. При небольшой инерционности исполнительного механизма частота вращения двигателя быстро достигает установившегося значения и пусковой ток также быстро спадает, не вызывая перегрева обмотки статора. Но такой значительный бросок тока в питающей сети может вызвать в ней заметное падение напряжения. Однако этот способ пуска благодаря своей простоте получил наибольшее применение для двигателей
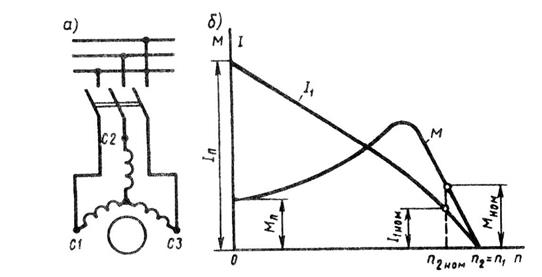
Рис. 15.3. Схема непосредственного включения в сеть (а) и графики изменения тока и момента при пуске (б) асинхронного двигателя с короткозамкнутым ротором
мощностью до 38—50 кВт и более (при достаточном сечении жил токоподводящего кабеля). При необходимости уменьшения пускового тока двигателя применяют какой-либо из способов пуска короткозамкнутых двигателей при пониженном напряжении.
Пуск при пониженном напряжении.В соответствии с (15.1) пусковой ток двигателя пропорционален подведенному напряжению U1, уменьшение которого вызывает соответствующее уменьшение пускового тока. Существует несколько способов понижения подводимого к двигателю напряжения. Рассмотрим некоторые из них.
Для асинхронных двигателей, работающих при соединении обмоток статора треугольником, можно применить пуск переключением обмотки статора со звезды на треугольник (рис. 15.4, а). В момент подключения двигателя к сети переключатель ставят в положение «звезда», при котором обмотка статора оказывается соединенной в звезду. При этом фазное напряжение на статоре понижается в  раз. Во столько же раз уменьшается и ток в фазных обмотках двигателя (рис. 15.4, б). Кроме того, при соединении обмоток звездой линейный ток равен фазному, в то время как при соединении этих же обмоток треугольником линейный ток больше фазного в раз. Следовательно, переключив обмотки статора звездой, мы добиваемся уменьшения линейного тока в ( )2 = 3 раза.
раз. Во столько же раз уменьшается и ток в фазных обмотках двигателя (рис. 15.4, б). Кроме того, при соединении обмоток звездой линейный ток равен фазному, в то время как при соединении этих же обмоток треугольником линейный ток больше фазного в раз. Следовательно, переключив обмотки статора звездой, мы добиваемся уменьшения линейного тока в ( )2 = 3 раза.
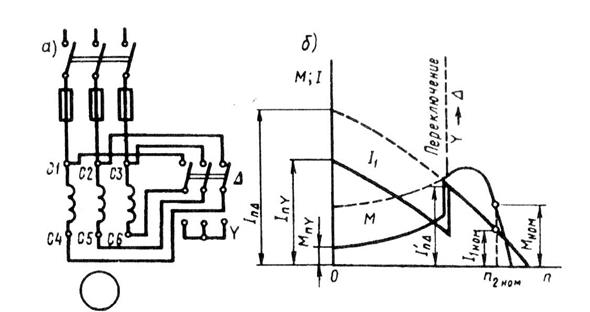
Рис. 15.4. Схема включения (а) и графики изменения момента и тока (фазного) при пуске (б) асинхронного двигателя с короткозамкнутым ротором переключением обмотки статора со звезды на треугольник
После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, переключатель быстро переводят в положение «треугольник» и фазные обмотки двигателя оказываются под номинальным напряжением. Возникший при этом бросок тока до значения I/пΔ является незначительным.
Рассмотренный способ пуска имеет существенный недостаток - уменьшение фазного напряжения в раз сопровождается уменьшением пускового момента в три раза, так как, согласно (13.19), пусковой момент асинхронного двигателя прямо пропорционален квадрату напряжения U1. Такое значительное уменьшение пускового момента не позволяет применять этот способ пуска для двигателей, включаемых в сеть при значительной нагрузке на валу.
Описанный способ понижения напряжения при пуске применим лишь для двигателей, работающих при соединении обмотки статора треугольником. Более универсальным является способ с понижением подводимого к двигателю напряжения посредством реакторов (реактивных катушек — дросселей). Порядок включения двигателя в этом случае следующий (рис. 15.5, а). При разомкнутом рубильнике 2 включают рубильник 7. При этом ток из сети поступает в обмотку статора через реакторы Р, на которых происходит падение напряжения j  хр (где хр — индуктивное сопротивление реактора, Ом). В результате на обмотку статора подается пониженное напряжение
хр (где хр — индуктивное сопротивление реактора, Ом). В результате на обмотку статора подается пониженное напряжение
После разгона ротора двигателя включают рубильник 2 и подводимое к обмотке статора напряжение оказывается номинальным.
Недостаток этого способа пуска состоит в том, что уменьшение напряжения в U/1/ U1ном
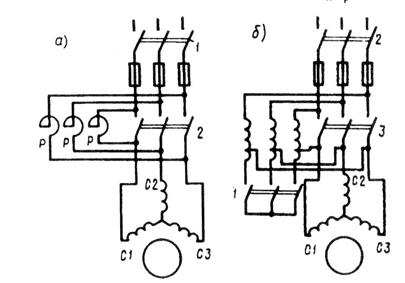
Рис. 15.5. Схемы реакторного (а) и автотрансформаторного (б) способов пуска асинхронных двигателей с короткозамкнутым ротором
раз сопровождается уменьшением пускового момента Мп в (U/1/ U1ном)2 раз.
При пуске двигателя через понижающий автотрансформатор (рис. 15.5, б) вначале замыкают рубильник 1, соединяющий обмотки автотрансформатора звездой, а затем включают рубильник 2 и двигатель оказывается подключенным на пониженное напряжение U/1 . При этом пусковой ток двигателя, измеренный на выходе автотрансформатора, уменьшается в КА раз, где КА — коэффициент трансформации автотрансформатора. Что же касается тока в питающей двигатель сети, т. е. тока на входе автотрансформатора, то он уменьшается в К2А раз по сравнению с пусковым током при непосредственном включении двигателя в сеть. Дело в том, что в понижающем автотрансформаторе первичный ток меньше вторичного в КА раз и поэтому уменьшение пускового тока при автотрансформаторном пуске составляет КАКА = К2А раз. Например, если кратность пускового тока асинхронного двигателя при непосредственном его включении в сеть составляет Iп/I1ном = 6 , а напряжение сети 380 В, то при автотрансформаторном пуске с понижением напряжения до 220 В кратность пускового тока в сети I/п/ I1ном = 6/ (380/220)2 = 2 .
После первоначального разгона ротора двигателя рубильник 1 размыкают и автотрансформатор превращается в реактор. При этом напряжение на выводах обмотки статора несколько повышается, но все же остается меньше номинального. Включением рубильника 3 на двигатель подается полное напряжение сети. Таким образом, автотрансформаторный пуск проходит тремя ступенями: на первой ступени к двигателю подводится напряжение U1 = (0,50÷0,60)U1ном, на второй — U1 = (0,70÷0,80)U1ном и, наконец, на третьей ступени к двигателю подводится номинальное напряжение U1ном.
Как и предыдущие способы пуска при пониженном напряжении, автотрансформаторный способ пуска сопровождается уменьшением пускового момента, так как значение последнего прямо пропорционально квадрату напряжения. С точки зрения уменьшения пускового тока автотрансформаторный способ пуска лучше реакторного, так как при реакторном пуске пусковой ток в питающей сети уменьшается в U/1/ U1ном раз, а при автотрансформаторном - в (U/1/ U1ном)2 раз. Но некоторая сложность пусковой операции и повышенная стоимость пусковой аппаратуры (понижающий автотрансформатор и переключающая аппаратура) несколько ограничивают применение этого способа пуска асинхронных двигателей.
§16.1. Принцип действия и пуск однофазного асинхронного двигателя
По своему устройству однофазный асинхронный двигатель аналогичен трехфазному и состоит из статора, в пазах которого уложена однофазная обмотка (см. рис. 8.8), и короткозамкнутого ротора. Особенность работы однофазного асинхронного двигателя заключается в том, что при включении однофазной обмотки статора С1—С2 в сеть (рис. 16.1) МДС статора создает не вращающийся, а пульсирующий магнитный поток (см. § 9.4) с амплитудой Фmах, изменяющейся от + Фmах до – Фmах При этом ось магнитного потока остается неподвижной в пространстве.
Для объяснения принципа действия однофазного двигателя пульсирующий поток Фmах разложим на два вращающихся в противоположные стороны потока Фпр и Фобр (рис. 16.2), каждый из которых равен 0,5Фmax и вращается с частотой (об/мин)
nпр = nобр = f160/ p = n1
Условимся считать поток Фпр вращающийся в направлении вращения ротора, прямым, а поток Фо6р -обратным. Допустим, что ротор двигателя вращается против часовой стрелки, т. е. в направлении потока Фпр.
Частота вращения ротора n2 меньше частоты вращения магнитного поля статора n1, поэтому скольжение ротора относительно вращающегося потока Фпр будет
sпр = (n1 – n2)/ n1 = s (16.1)
Обратный поток Фобр вращается противоположно ротору, поэтому частота вращения ротора n2 относительно Фобр - отрицательная. В этом случае скольжение ротора относительно Фобр определится выражением
sобр =  (16.2)
(16.2)
Прямое поле наводит в обмотке ротора ЭДС Е2пр, а обратное поле — ЭДС Е2обр. Эти ЭДС создают в обмотке ротора токи I/2пр и I/2обр.
Известно, что частота тока в роторе пропорциональна скольжению (f2 = sf1). Так как snp < sобр, то частота тока I/2обр намного больше частоты тока I/2пр. Так, для однофазного двигателя с n1 = 1500 об/мин, n2 = 1450 об/мин и f1 = 50 Гц получим:
snp = (1500 - 1450)/ 1500 = 0,033;
f2пр = 0,033 - 50 = 1,8 Гц;
sобр = (1500 +1450)/ 1500 = 1,96;
f2о6р = 1,96 - 50 = 98 Гц.
Рис.16.1 Схема включения однофазного
асинхронного двигателя
Индуктивное сопротивление обмотки ротора току I/2обр во много раз больше ее активного сопротивления (потому что f2обр >>f2пр). Ток I/2о6р является почти чисто индуктивным, оказывающим сильное размагничивающее действие на обратное поле Фобр. В результате обратное поле и обусловленный им момент Мобр оказываются значительно ослабленными и ротор однофазного двигателя вращается и направлении прямого поля под действием момента
М = Мпр - М06р, (16.3)
где Мпр — электромагнитный момент, обусловленный прямым полем.
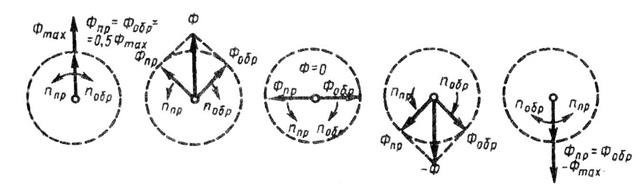
Рис. 16.2. Разложение пульсирующего магнитного потока на два вращающихся
На рис. 16.3 представлен график зависимости вращающего момента М в функции скольжения s = sпр. Этот график получен путем наложения графиков Мпр = f(snp) и Мо6р = f(sобр)- При малых значениях скольжения s, что соответствует работе двигателя в пределах номинальной нагрузки, вращающий момент Мсоздается главным образом моментом Мпр.
При sпр = sобр = 1 моменты Мпр и Мо6р равны, а поэтому пусковой момент однофазного двигателя равен нулю. Следовательно, однофазный асинхронный двигатель не может самостоятельно прийти во вращение при подключении его к сети, а нуждается в первоначальном толчке, так как лишь при s≠ 1 на ротор двигателя действует вращающий момент М = Мпр- Мобр
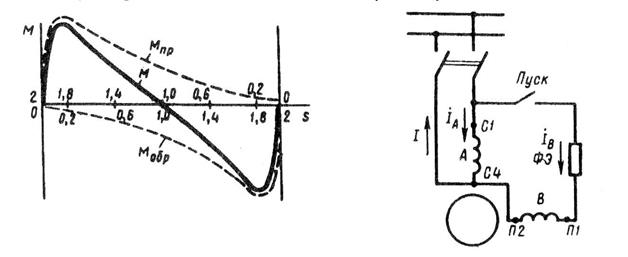
Рис. 16.3. Механические характе- Рис. 16.4. Схема однофазного ристики однофазного асинхронного асинхронного двигателя с пусковой двигателя обмоткой
Приведенные на рис. 16.3 зависимости моментов показывают, что однофазный асинхронный двигатель не создает пускового момента. Чтобы этот момент появился, необходимо во время пуска двигателя создать в нем вращающееся магнитное поле. С этой целью на статоре двигателя помимо рабочей обмотки Априменяют еще одну обмотку — пусковую В. Эти обмотки располагают на статоре обычно так, чтобы их оси были смещены относительно друг друга на 90 эл. град. Кроме того, токи в обмотках статора  и
и  должны быть сдвинуты по фазе относительно друг друга. Для этого в цепь пусковой обмотки включают фазосмещающий элемент (ФЭ), в качестве которого могут быть применены активное сопротивление, индуктивность или ем кость (рис. 16.4). По достижении частотой вращения значения близкого к номинальному, пусковую обмотку Вотключают с по мощью реле. Таким образом, во время пуска двигатель является двухфазным, а во время работы — однофазным.
должны быть сдвинуты по фазе относительно друг друга. Для этого в цепь пусковой обмотки включают фазосмещающий элемент (ФЭ), в качестве которого могут быть применены активное сопротивление, индуктивность или ем кость (рис. 16.4). По достижении частотой вращения значения близкого к номинальному, пусковую обмотку Вотключают с по мощью реле. Таким образом, во время пуска двигатель является двухфазным, а во время работы — однофазным.
Для получения вращающегося магнитного поля посредством двух обмоток на статоре, смещенных относительно друг друга на 90 эл. град, необходимо соблюдать следующие условия (рис. 16.5):
а) МДС рабочей и пусковой обмоток  и
и  должны быть и равны и сдвинуты в пространстве относительно друг друга на 90 эл. град;
должны быть и равны и сдвинуты в пространстве относительно друг друга на 90 эл. град;
б) токи в обмотках статора и должны быть сдвинуты по фазе относительно друг друга на 90°.
При строгом соблюдении указанных условий вращающееся поле статора является круговым, что соответствует наибольшему вращающему моменту. При частичном нарушении какого-либо из условий поле статора становится эллиптическим, содержащим обратную составляющую (см. рис. 9.5, б). Обратная составляющая поля создает тормозной момент и ухудшает пусковые свойства двигателя.
Из векторных диаграмм, приведенных на рис. 16.6, видно, что активное сопротивление и индуктивность в качестве ФЭ не обеспечивают получения фазового сдвига между токами в 90°. Лишь только емкость С в качестве ФЭ обеспечивает фазовый сдвиг ψ = 90°. Значение этой емкости выбирают таким, чтобы ток пусковой обмотки в момент пуска (s = 1) опережал по фазе напряжение  , на угол φв, дополняющий угол φА до 90°:
, на угол φв, дополняющий угол φА до 90°:

Рис. 16.5. Получение вращающегося магнитного
поля двухфазной системой токов
Если при этом обе обмотки создают одинаковые по значению МДС, то в начальный период пуска вращающееся поле окажется круговым и двигатель будет развивать значительный начальный пусковой момент. Однако применение емкости в качестве ФЭ часто ограничивается значительными габаритами конденсаторов, тем более что для получения кругового поля требуются конденсаторы значительной емкости. Например, для однофазного двигателя мощностью 200 Вт необходима емкость 30 мкФ при рабочем напряжении 300—500 В.
Получили распространение однофазные двигатели с активным сопротивлением в качестве ФЭ. При этом повышенное активное сопротивление пусковой обмотки достигается тем, что она выполняется проводом уменьшенного сечения (по сравнению с проводом рабочей обмотки). Так как эта обмотка включена на непродолжительное время (обычно несколько секунд), то такая ее конструкция вполне допустима. Пусковой момент таких двигателей обычно не превышает номинального, но это вполне приемлемо при пуске двигателей при небольшой нагрузке на валу.
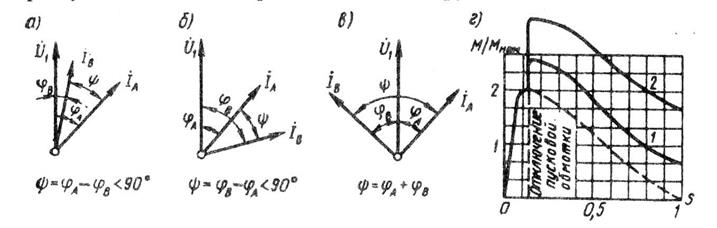
Рис. 16.6. Сравнение свойств фазосмещающих элементов:
а— активное сопротивление, б— индуктивность, в— емкость, г— механические характеристики двигателя при различных фазосмещающих элементах; 1 — активное сопротивление; 2— емкость
Применение емкости в качестве ФЭ позволяет получить пусковой момент Мп= (1,6÷2,0) Мном. На рис. 16.6, г приведены механические характеристики однофазного асинхронного двигателя при различных ФЭ. Для большей наглядности значения момента даны в относительных единицах.
22. Синхронные машины – конструкция, принцип действия, область применения.
Синхронные машины — это бесколлекторные машины переменного тока. По своему устройству они отличаются от асинхронных машин лишь конструкцией ротора, который может быть явнополюсным или неявнополюсным. Что же касается свойств, то синхронные машины отличаются синхронной частотой вращения ротора (n2 = n1 = const) при любой нагрузке, а также возможностью регулирования коэффициента мощности, устанавливая такое его значение, при котором работа синхронной машины становится наиболее экономичной. Синхронные машины обратимы и могут работать как в режиме генератора, так и в режиме двигателя. Синхронные генераторы составляют основу электротехнического оборудования электростанций, т. е. практически вся электроэнергия вырабатывается синхронными генераторами. Единичная мощность современных синхронных генераторов достигает миллиона киловатт и более. Синхронные двигатели применяются главным образом для привода устройств большой мощности. Такие двигатели по своим технико-экономическим показателям превосходят двигатели других типов. В крупных электроэнергетических установках синхронные машины иногда используются в качестве компенсаторов — генераторов реактивной мощности, позволяющих повысить коэффициент мощности всей установки. В данном разделе рассмотрены главным образом трехфазные синхронные машины. Приведены также сведения по некоторым типам синхронных двигателей весьма малой мощности, применяемым в устройствах автоматики и приборной техники.
mykonspekts.ru












Поделиться с друзьями: