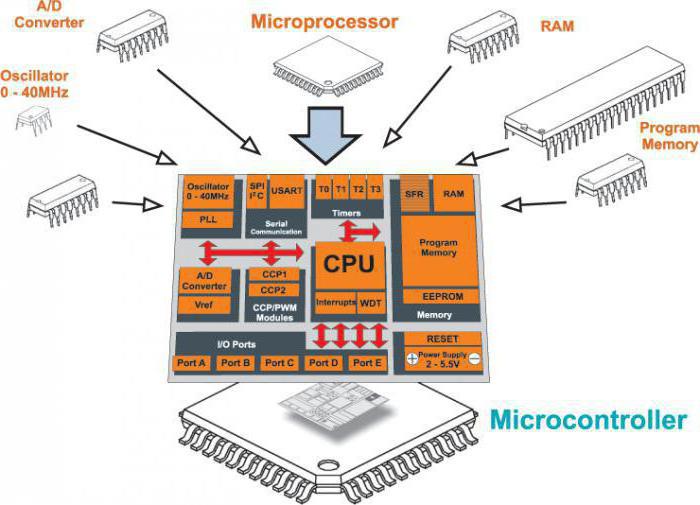
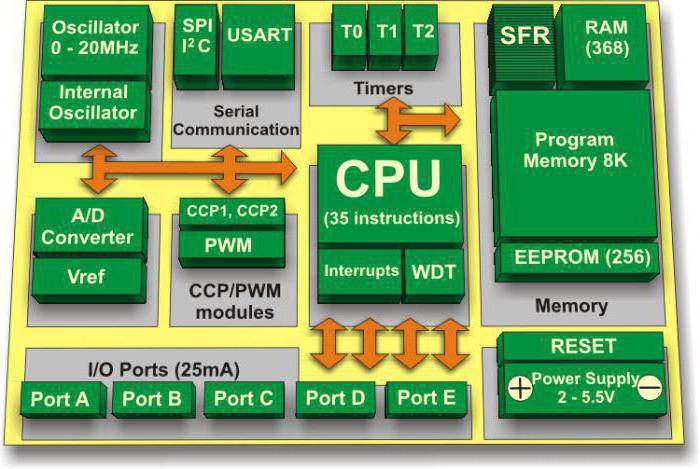
Что делать, если техника работает на разных «уровнях»? Когда она «общается» на различных языках? Сложно было бы добиться конструктивного выполнения функционала, если бы не полезные дополнения. Сейчас это очень сложная техническая единица, которая значительным образом была доработана со времени своей разработки. В современном среднестатистическом контроллере имеются собственный микропроцессор, регистры внешних устройств, благодаря которым осуществляется взаимодействие устройства ЦП, ОЗУ, ПЗУ, согласующие (буферные) схемы. Вот что такое контроллер. Чтобы представить, что собой являет этот сложный прибор, представьте упрощенную специализированную электронно-вычислительную машину, которая занимается только определённым спектром действий – допустим, осуществляет взаимодействие с клавиатурой, что подсоединена к компьютеру. Как только осуществляется нажатие на клавишу, данная информация передаётся в центральный процессор, где она уже соответствующе обрабатывается им. Для чего они ещё могут применяться? Вот контроллер Simple Communications используется для того, чтобы отслеживать температуру составляющих частей системного блока. Ведь перегрев может привести к тому, что что-то расплавится и выйдет из строя. Поэтому и было предусмотрено такое устройство, которое в качестве реакции может включить/усилить систему охлаждения или ослабить мощность работы компонента. Чтобы любой прибор нормально работал, необходимы драйвера контроллера. Для Windows 7 или другой операционной системы существуют свои системные файлы, которые организуют работу устройства с персональным компьютером. fb.ru Автоматические системы управления невозможно представить без различных технических устройств. Среди них, ведущее место занимают программируемые логические контроллеры, представляющие собой комплекс микропроцессоров. С их помощью осуществляется сбор, преобразование, обработка и хранение информации. На основании полученных данных вырабатываются команды управления. Контроллеры оборудованы большим количеством входов и выходов, куда подключаются всевозможные ключи, датчики и прочие исполнительные механизмы. В целом, все эти элементы соединяются с объектом управления и производят работу в реальном времени. Работа контроллера, в целом, очень похожа на действие обыкновенных микропроцессоров. Для каждого универсального логического контроллера предусмотрено две части программного обеспечения. Одна из них является системной частью и, фактически, представляет собой операционную систему. Она позволяет осуществлять управление всеми узлами контроллера, выполнять внутреннюю диагностику и обеспечивать взаимосвязь всех составных частей. Операционная система располагается в собственной памяти, находящейся в центральном процессоре, и находится в постоянной готовности к работе. Вторая часть включает в себя прикладную программу, которая занимается непосредственным управлением. Она может быть настроена на любые необходимые действия, после завершения которых управление вновь переходит на системный уровень. Основными элементами схемы контроллера являются входы и выходы. Дискретный вход устройства обеспечивает прием одного бинарного электрического сигнала во включенном или выключенном состоянии. Как правило, это стандартные сигналы с постоянным током в 24 вольта. Аналоговые электрические сигналы отражают физический уровень тока или напряжения в данный промежуток времени. Они связаны с такими показателями, как скорость, температура, давление, масса и прочие. Программируемые логические контроллеры позволяют осуществлять аналого-цифровое преобразование входных сигналов. Это приводит к образованию дискретной переменной, имеющей определенную разрядность. В большинстве случаев применяются преобразователи от 8 до 12 разрядов, обеспечивающих необходимую точность управления всеми процессами. Все модули с аналоговыми вводами имеют многоканальную конструкцию. Вход аналого-цифрового преобразователя подключается к необходимому модулю с помощью входного коммутатора. Таким образом, становится возможным выполнить все требования и запросы систем, связанных с промышленной автоматикой. electric-220.ru Среди большого разнообразия контроллеров, пользователи ищут для самостоятельной сборки те схемы, которые будут приемлемы и наиболее эффективны. Применяются и одноканальные устройства и многоканальные: 3-х и 4-х осевой контроллеры. Многоканальные контроллеры ШД (шаговых двигателей) при типоразмерах 42 или 57 мм используется в случае небольшого рабочего поля станка – до 1 м. Когда собирают станок большего рабочего поля – свыше 1м, нужен типоразмер 86 мм. Управлять ним можно, пользуясь одноканальным драйвером (ток управления, превышающий 4,2 А). Управлять станком с числовым программным управлением, в частности, фрезерным настольным можно контроллером, созданным на базе специализированных микросхем –драйверов, предназначенных к применению для ШД до 3А. Контроллер ЧПУ станка управляется спецпрограммой. Ее устанавливают на ПК, имеющий частоту процессора свыше 1GHz, а объем памяти 1 Гб). При меньшем объеме, систему оптимизируют. ОБРАТИТЕ ВНИМАНИЕ! Если сравнивать с ноутбуком, то в случае подключения стационарного компьютера – лучшие результаты, да и обходится он дешевле. Подключая контроллер к компьютеру, используют USB или разъем параллельного порта LPT. Если этих портов нет, то пользуются платами-расширителями или контроллерами-преобразователями. Вехи техпрогресса схематически можно обозначить так: ВАЖНО! Не стоит перегружать ШД, применяя крупную фрезу агрегата и большую скорость. Большинство умельцев предпочитают управление через LPT порт для большинства программ управления любительского уровня. Вместо применения комплекта спецмикросхем для этой цели, кое-кто строит контроллер из подручных материалов – полевых транзисторов из сгоревших материнских плат (при напряжении свыше 30 вольт и током больше 2 ампер). А поскольку создавался станок для нарезания пенопласта, в качестве ограничителя тока изобретатель использовал автомобильные лампы накаливания, а ШД снимали со старых принтеров или сканеров. Такой контроллер устанавливали без изменений в схеме. Чтобы сделать простейший станок ЧПУ своими руками, разбирая сканер, помимо ШД, извлекается и микросхема ULN2003, и два стальные прутки, они пойдут на тестовый портал. К тому же понадобятся: Приступив к работе над самодельным контроллером для чпу, первый шаг – аккуратно припаять микросхему на макетную плату с двумя шинами электропитания. Дальше последует соединение вывода ULN2003 и коннектора LPT. Далее оставшиеся выводы подключаем по схеме. Нулевой вывод (25-ый параллельного порта) соединяется с отрицательным на шине питания платы. Затем ШД соединяют с устройством управления, а гнездо для электропитания – с соответствующей шиной. Для надёжности соединений проводов выполняют их фиксацию термоклеем. Не составит труда подключение Turbo CNC. Программа эффективна с MS-DOS, совместима и с Windows, но в этом случае возможны некоторые ошибки и сбои. Настроив программу на работу с контроллером, можно изготовить тестовую ось. Последовательность действий по подключению станков такова: Программируя работу 3-осевого станка, в настройках по первым двум осям – без перемен. А вот при программировании первых 4-х фаз третьей – вводятся изменения. Внимание! Используя упрощенную схему контроллера ATMega32 (Приложение 1), в отдельных случаях можно столкнуться с некорректной обработкой оси Z — режим полушага. А вот в полной версии его платы (Приложение 2), токи осей регулируются внешним аппаратным ШИМом. В контроллерах, собранных ЧПУ станков – широкий спектр использования: в плоттерах, небольших фрезерах, работающих с древесиной и пластиковыми деталями, граверах по стали, миниатюрных сверлильных станках. Устройства с осевым функционалом используют также в графопостроителях, на них можно рисовать и изготовлять печатные платы. Так что усилия, затраченные на сборку мастерами-умельцами, в будущем контроллере обязательно окупятся. vseochpu.ru Один из используемых подходов, позволяющих существенно сократить потери на нагревании силовых компонентов радиосхем, представляет собой использование переключательных режимов работы установок. При подобных системах электросиловой компонент или раскрыт - в это время на нем наблюдается фактически нулевое падение напряжения, или открыт - в это время на него подается нулевой ток. Рассеиваемую мощность можно вычислить, перемножив показатели силы тока и напряжения. В этом режиме получается достичь коэффициента полезного действия около 75-80% и более. Для получения на выходе сигнала требуемой формы силовой ключ должен открываться всего лишь на определенное время, пропорциональное вычисленным показателям выходного напряжения. В этом и заключается принцип широтно-импульсной модуляции (ШИМ, PWM). Далее сигнал такой формы, состоящий из импульсов, разнящихся по своей ширине, поступает в область фильтра на основе дросселя и конденсатора. После преобразования на выходе будет практически идеальный сигнал требуемой формы. Область применения ШИМ не ограничивается импульсными источниками питания, стабилизаторами и преобразователями напряжения. Использование данного принципа при проектировании мощного усилителя звуковой частоты дает возможность существенно снизить потребление устройством электроэнергии, приводит к миниатюризации схемы и оптимизирует систему теплоотдачи. К недостаткам можно причислить посредственное качество сигнала на выходе. Создавать ШИМ-сигналы нужной формы достаточно трудно. Тем не менее индустрия сегодня может порадовать замечательными специальными микросхемами, известными как ШИМ-контроллеры. Они недорогие и целиком решают задачу формирования широтно-импульсного сигнала. Сориентироваться в устройстве подобных контроллеров и их использовании поможет ознакомление с их типичной конструкцией. Стандартная схема контроллера ШИМ предполагает наличие следующих выходов: Количество выводов микросхемы определяется её конструкцией и принципом работы. Не всегда удается сразу разобраться в сложных терминах, но попробуем выделить суть. Существуют микросхемы на 2-х выводах, управляющие двухтактными (двухплечевыми) каскадами (примеры: мост, полумост, 2-тактный обратный преобразователь). Существуют и аналоги ШИМ-контроллеров для управления однотактными (одноплечевыми) каскадами (примеры: прямой/обратный, повышающий/понижающий, инвертирующий). Помимо этого, выходной каскад может быть по строению одно- и двухтактным. Двухтактный используется в основном для управления полевым транзистором, зависящим от напряжения. Для быстрого закрытия необходимо добиться быстрой разрядки емкостей "затвор - исток" и "затвор - сток". Для этого как раз и используется двухтактный выходной каскад контроллера, задачей которого является обеспечение замыкание выхода на общий кабель, если требуется закрыть полевой транзистор. Для контроля над биполярным транзистором двухтактный каскад не используется, так как управление осуществляется с помощью тока, а не напряжения. Для закрытия биполярного транзистора достаточно всего лишь прекратить протекание тока через базу. При этом замыкание базы на общий провод необязательно. Задумав спроектировать контроллер ШИМ своими руками, необходимо как следует продумать все детали его реализации. Только так можно создать работающее устройство. Кроме вышеуказанных выходов, работа ШИМ-контроллера подразумевает наличие следующих функций: Микросхемы ШИМ-контроллеров могут применяться для различных целей. Чтобы отладить их совместную работу с другими элементами устройства, следует разобраться, как устанавливать те или иные параметры работы контроллера и какие компоненты цепи за это отвечают. Блок питания является неотъемлемым элементом большинства современных девайсов. Срок его эксплуатации практически ничем не ограничен, но от его исправности во многом зависит безопасность работы подконтрольного устройства. Спроектировать блок питания можно и своими руками, изучив принцип его действия. Основная цель – формирование нужной величины напряжения питания, обеспечение её стабильности. Для большинства мощных устройств гальванической развязки, основанной на действии трансформатора, будет недостаточно, да и подобранный элемент явно удивит пользователей своими габаритами. Увеличение частоты тока питания позволяет существенно уменьшить размеры используемых компонентов, что обеспечивает популярность блоков питания, работающих на частотных преобразователях. Один из самых простых вариантов реализации питающих элементов – блок-схема, состоящая из прямого и обратного преобразователей, генератора и трансформатора. Несмотря на видимую простоту реализации таких схем, на практике они демонстрируют больше недочетов, чем преимуществ. Большинство получаемых показателей стремительно изменяются под влиянием скачков напряжения питания, при загрузке выхода преобразователя и даже при увеличении температуры окружающей среды. ШИМ-контроллеры для блоков питания дают возможность стабилизировать схему, а также воплотить множество дополнительных функций. Типовая схема состоит из генератора импульсов, в основе которого лежит ШИМ-контроллер. Широтно-импульсная модуляция дает возможность собственноручно контролировать амплитуду сигнала на выходе ФНЧ, изменяя при необходимости длительность импульса или его скважность. Сильная сторона ШИМ – высокий КПД усилителей мощности, в особенности звука, что в целом обеспечивает устройствам довольно обширную сферу применения. ШИМ-контроллеры для блоков питания могут использоваться в схемах с различными мощностями. Для реализации относительно маломощных схем необязательно включать в их состав большое число элементов – в качестве ключа может выступать обычный полевой транзистор. ШИМ-контроллеры для источников питания большой мощности могут иметь также элементы управления выходным ключом (драйверы). В качестве выходных ключей рекомендуется использовать IGBT-транзисторы. При работе любого устройства полностью исключить вероятность поломки невозможно, и преобразователей это тоже касается. Сложность конструкции при этом не имеет значения, проблемы в эксплуатации может вызвать даже известный ШИМ-контроллер TL494. Неисправности имеют различную природу – некоторые из них можно выявить на глаз, а для обнаружения других требуется специальное измерительное оборудование. Чтобы узнать, как проверить ШИМ-контроллер, следует ознакомится со списком основных неисправностей приборов, а лишь позже – с вариантами их устранения. Одна из часто встречающихся проблем – пробой ключевых транзисторов. Результаты можно увидеть не только при попытке запуска устройства, но и при его обследовании с помощью мультиметра. Кроме того, существуют и другие неисправности, которые несколько сложнее обнаружить. Перед тем как проверить ШИМ-контроллер непосредственно, можно рассмотреть самые распространенные случаи поломок. К примеру: Универсальные и многофункциональные ШИМ-контроллеры сейчас можно встретить практически везде. Они служат не только в качестве неотъемлемой составляющей блоков питания большинства современных устройств - типовых компьютеров и других повседневных девайсов. На основе контроллеров разрабатываются новые технологии, позволяющие существенно сократить расход ресурсов во многих отраслях человеческой деятельности. Владельцам частных домов пригодятся контроллеры заряда аккумуляторов от фотоэлектрических батарей, основанные на принципе широтно-импульсной модуляции тока заряда. Высокий коэффициент полезного действия делает разработку новых устройств, действие которых основывается на принципе ШИМ, весьма перспективной. Вторичные источники питания - вовсе не единственное направление деятельности. www.syl.ru Когда делаются схемы, необходимо, чтобы кто-то или что-то контролировало выполнение необходимых действий. Для человека это довольно проблематично, так как приходится использовать значительное количество различных элементов, позволяющих контролировать их работу (транзисторы, резисторы, тиристоры, диоды, конденсаторы и прочие). Но все сложные и большие схемы можно контролировать с помощью контроллеров (микроконтроллеров). Что они собой представляют, будет рассказано на примере семейств РІС. Итак, что такое PIC-контроллеры для чайников? Какая их схема и где они используются. Для работы подавляющего большинства РІС-контроллеров необходимо стабильное напряжение – 5В. Этого хватает, чтобы он мог работать в своём обычном режиме и выполнять поставленную перед ним программу. Программирование PIC-контроллеров напрямую от компьютера невозможно. Для этой цели используется программатор. Благодаря своей универсальности PIC-контроллер может быть применён практически где угодно. Сами микроконтроллеры можно встретить в холодильниках, телевизорах, стиральных машинках. Но линейка продукции РІС имеет ту особенность, что схемы на PIC-контроллерах популярны среди радиолюбителей и робототехников-самоучек. С их помощью можно легко настроить работу узла или всего приспособления. Способствует такой популярности разумная цена, легкость программирования и значительное количество учебного материала. Применить PIC-контроллер можно при создании машинки на радиоуправлении, робота-руки и в других поделках, которые можно сделать, ограничиваясь скромным бюджетом. Можно использовать и для чего-то производственного – довольно популярной является тема создания автоматических самодельных станков, управляемых микроконтроллером. Спектр использования является широким, и при грамотном подходе могут быть выполнены практически любые цели, поэтому схемы на PIC-контроллерах можно увидеть не только на любительских творениях. Существует и ряд программного обеспечения, предоставляемого другими компаниями. В целом их функционал является похожим, но существуют и отличия. Так, многие высказывают недовольство, что MPLAB имеет нелояльный к пользователям дизайн. Поэтому производители делают ставку на сохранении обрезаемых функций и удобстве работы с их программным обеспечением. Программы для PIC-контроллеров весьма разнообразны, поэтому тут в значительной мере дело вкуса. Так, при создании программы необходимо указать, для какого контроллера она предназначается. Может понадобиться провести ряд настроек, но проводить их необходимо при наличии опыта работы или уверенности в своих силах, ведь ошибки могут привести к тому, что микроконтроллеры превратятся в обычные кусочки пластика и железа. Так, самодельные программаторы являются довольно дешевыми. Но их использование чревато тем, что они могут запросто превратить микроконтроллер в кусочек пластика и железа. И программирование микроконтроллеров может в таких случаях обратиться неприятными последствиями в виде удара током, поэтому следует придерживаться техники безопасности. К тому же если делать самому с нуля, то часто получится продукт с довольно ограниченными возможностями относительно смены объекта работы. Но в мировой сети можно найти значительное количество решений этой проблемы, предложенных другими людьми, и которые, вероятно, не доставят вам проблем. Оригинальный программатор от компании-производителя сможет качественно выполнить свою работу для любого микроконтроллера. На него существует гарантия, и если после получения он не работает, то заменить не проблема. Но в порядке вещей, когда прошивка PIC-контроллеров им осуществляется без проблем. Но останавливает от его приобретения довольно высокая цена. Программаторы, выпущенные другими компаниями, имеют довольно широкий диапазон объектов, с которыми работают. Их особенностью является низкая цена и/или возможность работать с другими микроконтроллерами кроме PIC. Есть и поистине универсальные «монстры», которые могут обеспечивать работу различных типов, но из-за необходимости создания большого количества соединений их цена низкой не бывает. fb.ru После того, как вы купили фотоэлектрические элементы и построили солнечную панель или изготовили самодельный ветрогенератор, встает вопрос об утилизации лишней энергии, когда аккумулятор полностью заряжен, а ветрогенератор или панель продолжают вырабатывать энергию. Это чревато довольно негативными последствиями как для аккумулятора, так и для самих источников энергии - перезаряд приводит к разрушению пластин АКБ, а ветроколесо начинает набирать неконтролируемые обороты и может пойти в разнос. Справится с этим нам поможет изготовление несложного, но довольно надежного универсального контроллера заряда, подходящего для заряда батарей как от солнечных элементов,так и от ветрогенератора. Первоначальная схема агрегата была разработанна Майклом Дэвисом (Michael Davis). Сигнал приходящий с выпрямителя ветрогенератора или солнечной панели коммутируется при помощи реле, управляеммым пороговой схемой с полевым транзисторным ключом. Пороги переключения режимов регулируются посредством подстроечных резисторов. В качестве нагрузки для утилизации энергии при полном заряде аккумулятора автор использовал 8 резисторов (тэнов) сопротивлением 4 Ома с мощностью рассеивания 50Вт. Готовое изделие было оформлено в пластиковый корпус. Я специально не заострял вашего внимания на описании мелочей из данного проекта, так как вскоре автор пошел по пути усовершенствования и упрощения конструкции своего детища. Модернизированную и упрощенную конструкцию контроллера и предлагаю рассмотреть подробнее. Как видно из принципиальной эл.схемы, принцип действия прибора нисколько не изменился. Упростилась сама схема - вместо микросхем ОУ и логической, автор применил самую распространенную микросхему таймера NE555P. Подробнее остановимся и на выборе деталей для проекта. В качестве стабилизатора напряжения питания самой схемы используется широко распространенный интегральный стабилизатор 7805 (К142ЕН5А). Транзистор Q1 может быть заменен на NTE123, 2N3904 или любой другой биполярный NPN структуры с подходящими параметрами. То же касается и полевого транзистора IRF540 - его меняем на любой подходящий по параметрам. Подстроечные резисторы лучше взять многооборотные. Подойдут любые с интервалом подстройки от 0 до 100К (но все же при 10К резисторах подстройка выйдет гораздо точнее, что немаловажно при установке режимов заряда гелевой батареи). В качестве коммутатора используется автомобильное реле на 12В с возможностью коммутации токов в 30-40А. Конденсаторы обвязки стабилизатора можно поставить любые - от керамических до пленочных, хотя я, как перестраховщик, ставил бы пленку. Светодиоды в контроллер заряда можно подобрать любые разного цвета свечения - LED1 индуцирует режим ''сброса'' энергии на нагрузку, а LED2 - режим заряда аккумулятора. Кнопки PB1 и PB2 любые надежные, без фиксации, служат для переключения схемы ''вручную'' при наладке (замере напряжения в контрольных точках TP1 и TP2). При первичной регулировке схемы, напряжение в контрольной точке TP1 выставляют равным 1.667В, а в контрольной точке TP2 - 3,333В. Все цепи питания устройства желательно снабдить предохранителями на соответствующие токи. Автор собрал устройство на монтажной плате и вставил в корпус подходящего размера. Однако один его предприимчивый соратник (Jason Markham) развел печатную плату для контроллера и успешно стал продавать через Интернет набор для самостоятельного изготовления (38долларов) и готовое изделие (54,95 долларов). Ничего не попишешь - Америка, хотя наш самодельщик за такую сумму соберет с десяток таких контроллеров заряда батарей. Испытания контроллера, проводимые долгое время как с ветроэнергоустановкой так и с солнечной панелью, показали высокую его надежность. Напоследок одно небольшое замечание: включение контроллера в систему производить только после подключения аккумулятора к его контактам, в противном случае устройство может неправильно работать или выйти из строя. Автор статьи: Электродыч. el-shema.ru Схема управления крановыми двигателями проектируются в соответствии с правилами эксплуатации крановых установок и технологическими требованиями, которые являются специфическими для различных видов кранов. К крановым механизмам предъявляются неодинаковые требования. Например, двигатели моста и тележки в ряде случаев не требуют регулирования скорости движения, в то время как подавляющее большинство подъемных устройств не может по технологическим условиям работать без регулирования скорости. Вследствие указанных обстоятельств появляется необходимость в применении для крановых механизмов различных систем электропривода и соответственно управления. По способу управления крановые электроприводы могут быть разделены на две группы: с силовыми и магнитными контроллерами. Выбор способа управления в зависимости от рабочего режима и мощности двигателя производится в соответствии с табл. 3, где буква К означает силовой контроллер с ручным приводом, а буква М - магнитный контроллер. Рабочие режимы кранового электрооборудования в общем случае понятие, охватывающее условия выбора всех элементов крана, включая электрооборудование. В это понятие входит частота пусков, относительная продолжительность включения (ПВ), годовое и суточное использование механизма, степень ответственности. Все многообразие режимов эксплуатации сведено к четырем: Л - легкий, С - средний, Т - тяжелый, ВТ - весьма тяжелый. Таблица 3 Мощность двигателя при ПВ до 40% Тип контроллера при режиме работы Л С Т ВТ До 10 кВт К К К М До 30 кВт К К М(К) М Свыше 30 Квт К М(К) М М В схемах управления электроприводами крановых механизмов на переменном и постоянном токе применяются кулачковые контроллеры соответственно ККТ и ККП. Схемы управления крановыми двигателями могут быть симметричными и несимметричными относительно нулевого положения контроллера или командоконтроллера. Симметричной схемой называется такая, при которой включение двигателя, а следовательно, и его характеристики на положениях рукоятки контроллера, имеющих одинаковый номер, аналогичны. Симметричные схемы применятся обычно на механизмах передвижения, когда требуется, чтобы при одинаковых положениях рукоятки контроллера в случае движения в разные стороны двигатель работал на аналогичных характеристиках. Несимметричные схемы применяются на механизмах подъема, когда при подъеме и спуске груза требуется, чтобы двигатель работал на различных характеристиках. Для крановых механизмов с режимом работы Л и С могут использоваться электроприводы с силовыми кулачковыми контроллерами типа ККТ - 61, ККТ - 62, ККТ - 63. Электропривод этого типа охватывает диапазон номинальных мощностей двигателей 11 - 180 кВт для механизма подъема и 3.5 - 110 кВт для механизма передвижения. На рис. 12 представлена схема кулачкового контроллера ККТ - 61А. Рис. 12. Схема кулачкового контроллера ККТ – 61А Контроллер имеет пять фиксированных рабочих положений для каждого направления движения и одно фиксированное нулевое положение. Контроллер обеспечивает ступенчатый пуск, ступенчатое регулирование скорости, реверс и торможение. Включение электродвигателя и реверсирование производится контактами К2, К4, К6, К8. Коммутирование ступеней реостата ротора осуществляется контактами К7, К9 - К12 по несимметричной схеме, когда с целью увеличения числа пусковых характеристик при ограниченном числе коммутирующих контактов на каждой позиции контроллера выводится резистор только в одной фазе. Для остановки двигателя после его отключения предусмотрен тормоз с приводом от электромагнита YВ, подключенного наглухо к статору двигателя. Рассмотрим работу схемы. Если контроллер установлен в нулевое положение, то контакты блокировки нулевого положения контроллера К1, К5, К3 замкнуты. Нажатием на кнопку SB можно включить линейный контактор КМ1 и через его контакты КМ1 напряжение будет подано на контроллер SA. Одна фаза С3 питающей сети подводится к статору двигателя М непосредственно, а две фазы С1 и С2 - через контроллер. В первом положении Вперед (Подъем) рукоятки контроллера замкнуты контакты К4, К8 и статор двигателя включается в сеть при полностью введенных сопротивлениях в цепи ротора. В первом положении Назад (Спуск) замкнуты контакты К2 и К6, чем обеспечивается изменение порядка чередования фаз напряжения на зажимах статора. Одновременно со статором двигателя в сеть включается тормозной электромагнит YB, растормаживающий механизм. В положениях контроллера 2 - 5 Вперед (Подъем) или Назад (Спуск) замыкаются контакты К10, К12, К11, К9, К7 и шунтируются ступени пусковых резисторов в цепи ротора двигателя. Резисторы выводятся по фазам несимметрично (возникающая при этом несимметрия ротора невелика и не оказывает существенного влияния на форму реостатных механических характеристик), что позволяет уменьшить число переключающих контактов контроллера при требуемом числе пускорегулировочных ступеней и получить механические характеристики (рис. 13), обеспечивающие требуемый режим работы механизма. Для механизмов передвижения они обеспечивают реостатное регулирование скорости в небольшом диапазоне и ограничение токов и моментов электропривода при пуске, которое осуществляет оператор, постепенно переставляя контроллер из положения 0 в положение 5 с допустимым темпом. Регулировочные возможности для механизмов подъема ограничены. При спуске грузов получить среднюю пониженную скорость спуска оператор может только периодически накладывая механический тормоз путем установки контроллера в нулевое положение. Развернутые схемы соединения резисторов для различных положений контроллера приведены на рис. 14. Рис. 13. Механические характеристики кранового асинхронного двигателя с пятью ступенями регулирования (контроллер ККТ61А) Рис. 14. Развернутые схемы соединения резисторов для различных положений контроллера ККТ - 61А Для управления двигателями постоянного тока последовательного возбуждения применяются контроллеры типа ККП - 101 (для механизмов передвижения), которые имеют симметричную схему, и типа ККП – 102 (для механизмов подъема) с несимметричной схемой. Схема контроллера ККП – 102 приведена на рис. 15. На рис. 16 приведены развернутые схемы включения двигателя последовательного возбуждения, управляемого посредством кулачкового контроллера, при подъеме и спуске грузов. Напряжение к двигателю подводится в обоих случаях через контакты 0Л и 3Л. При подъеме грузов якорь двигателя М, обмотка возбуждения ОВ, обмотка тормозного электромагнита YB и пускорегулирующие резисторы Р1 - Р2, Р2 - Р3, Р3 - Р4, Р4 - Р5, Р5 - Р6 соединены последовательно. Пуск двигателя на подъем и регулирование скорости осуществляется путем постепенного выключения резисторов в цепи якоря. В режиме спуска грузов используется потенциометрическая схема с параллельным соединением цепей якоря и обмотки возбуждения. Регулирование угловой скорости осуществляется изменением сопротивления в цепи обмотки возбуждения и в общей части схемы. Каждому положению контроллера соответствует определенная характеристика, имеющая то же цифровое обозначение (рис. 17). Характеристика 1 подъема груза соответствует первому положению контроллера и получается при замкнутом сопротивлении Р1 - Р2 и введенном в цепь якоря Р2 - Р6. На всех положениях спуска последовательно с якорем включено сопротивление Р7 - Р8. При опускании грузов характеристика 1 получается путем введения сопротивления Р1 - Р3 последовательно с сетью, а в цепи обмотки возбуждения дополнительного сопротивления нет. На следующих положениях контроллера последовательно вводятся дополнительные сопротивления в цепь обмотки возбуждения. Причем до положения 5 общее дополнительное сопротивление, включенное последовательно с сетью, остается неизменным (Р1 -Р3), а начиная с положения 5 оно переводится в цепь обмотки возбуждения. В положении 6 обмотка возбуждения включается в сеть независимо от якоря, двигатель имеет в данном случае механическую характеристику, подобную двигателю независимого возбуждения. Это исключает при соответствующем подборе сопротивлений возможность значительного повышения скорости спуска грузов. Тяжелые грузы спускаются в генераторном режиме (тормозной спуск). При этом контроллерное управление обеспечивает плавное регулирование и низкие скорости опускания грузов. Когда легкие грузы не могут спускаться за счет собственного веса вследствие того, что создаваемый ими момент меньше момента трения, двигатель создает дополнительный момент, преодолевающий совместно с грузом момент трения (силовой спуск). Рис. 15. Принципиальная схема управления двигателем последовательного возбуждения с кулачковым контроллером ККП - 102 Перевод контроллера при спуске грузов в нулевое положение сопровождается генераторным (динамическим) торможением двигателя с самовозбуждением, так как при отключении двигателя от сети ЭДС якоря создает в обмотке возбуждения ток, который по направлению будет соответствовать протекавшему ранее току и возбудит машину. Рис. 16. Развернутые схемы включения двигателя последовательного возбуждения, управляемого посредством кулачкового контроллера Рис. 17. Механические характеристики ДПТ последовательного возбуждения, управляемого посредством контроллера ККП - 102 Если двигатель работал на подъем груза, то перевод контроллера в нулевое положение не вызовет динамического торможения, хотя соответствующая цепь будет создана. В этом случае при замыкании цепи машина будет размагничена. Расчет механических и электромеханических характеристик ДПТ последовательного возбуждения, управляемого посредством контроллера ККП - 102 , ,,,,,, 1. Двигательный режим работы ДПТ последовательного возбуждения (первый квадрант подъем груза). Схема включения двигателя имеет вид Расчет искусственных характеристик можно вести различными методами: А. Если известны естественная электромеханическая характеристика двигателя и зависимость , то по выражению рассчитывают электромеханическую характеристику, а пользуясь зависимостью механическую характеристику. В. Если естественная характеристика двигателя последовательного возбуждения не известна, то пользуются зависимостью . Тогда методика расчета реостатных характеристик следующая: – задаемся рядом значений , ; – по известной зависимости для каждогоопределяем соответствующее значение, при; – определяем значение скорости ; – определяем значение момента . 2. Динамическое торможение с самовозбуждением ДПТ последовательного возбуждения (четвертый квадрант спуск груза). Схема включения двигателя имеет вид Методика расчета (на основании кривой ): – задаемся рядом значений ; – по известной зависимости для каждого определяем соответствующее значение при величина; – определяем значение скорости ; – определяем значение момента . 3. Характеристики ДПТ в режиме спуска (обмотка возбуждения включена параллельно) – первый и второй квадранты. Рис. 18 Методика расчета: – задаемся рядом значений , ; – определяем , – определяем ток в обмотки возбуждения ; – по известной зависимости для каждогоопределяем соответствующее значение при величина; – определяем ток якоря ; – определяем значение скорости (знак «+» соответствует генераторному режиму работы, знак «-» – двигательному) – определяем значение момента . Рис. 19 studfiles.net1.5.2. Контроллерное управление крановыми двигателями. Схема контроллера
Что такое контроллер? Схема контроллера
Что такое контроллер
 Так называется электронное устройство, которое используется, чтобы подключать к магистралям компьютера различные периферийные устройства, которые отличаются своим интерфейсом, принципом действия и конструктивным исполнением. По смысловому значению к контроллеру подойдёт слово «адаптер». Говоря о них, можно сказать, что их назначение является одинаковым. Но контроллером всё же называют более сложные устройства. Под ним понимают приборы, которые могут совершать самостоятельные действия после того, как были получены команды от программы, которая занимается их обслуживанием. Так, в составе сложного контроллера может быть и собственный процессор. Но если рассматривать с точки зрения рядового пользователя, то данные понятия неотличимы и могут считаться синонимами. Вот что такое контроллер.
Так называется электронное устройство, которое используется, чтобы подключать к магистралям компьютера различные периферийные устройства, которые отличаются своим интерфейсом, принципом действия и конструктивным исполнением. По смысловому значению к контроллеру подойдёт слово «адаптер». Говоря о них, можно сказать, что их назначение является одинаковым. Но контроллером всё же называют более сложные устройства. Под ним понимают приборы, которые могут совершать самостоятельные действия после того, как были получены команды от программы, которая занимается их обслуживанием. Так, в составе сложного контроллера может быть и собственный процессор. Но если рассматривать с точки зрения рядового пользователя, то данные понятия неотличимы и могут считаться синонимами. Вот что такое контроллер.Дополнительные
 Зачем необходимо применять контроллеры, кроме уже указанного посредничества? Наличие подобных устройств позволяет уменьшать нагрузку, которая приходится на центральный процессор. Благодаря этому значительно возрастает производительность системы. Механизм такой помощи заключается в том, что контроллеры освобождают компьютерные центральные процессоры от самых медленных операций ввода или вывода информации. Впервые идея применения специальных интеллектуальных схем, которые будут разгружать ЦП, была реализована в третьем поколении электронно-вычислительных машин коллективного использования ІВМ-360. В Советском Союзе был специфичный аналог ЕС ЭВМ. К появлению четвертого поколения возникла технологическая возможность сбора системы управления в рамках единого кристалла. Таким образом, появились первые микроконтроллеры.
Зачем необходимо применять контроллеры, кроме уже указанного посредничества? Наличие подобных устройств позволяет уменьшать нагрузку, которая приходится на центральный процессор. Благодаря этому значительно возрастает производительность системы. Механизм такой помощи заключается в том, что контроллеры освобождают компьютерные центральные процессоры от самых медленных операций ввода или вывода информации. Впервые идея применения специальных интеллектуальных схем, которые будут разгружать ЦП, была реализована в третьем поколении электронно-вычислительных машин коллективного использования ІВМ-360. В Советском Союзе был специфичный аналог ЕС ЭВМ. К появлению четвертого поколения возникла технологическая возможность сбора системы управления в рамках единого кристалла. Таким образом, появились первые микроконтроллеры.Что в него входит
Работа с компьютером
 Как контроллер работает с персональным компьютером? Для этого необходимо наличие в его ОЗУ соответствующей программы и данных. Попадают они сюда из различных устройств, таких как клавиатура, диски, мыши. Обычно для их обозначения используется термин «внешние». Хотя ради справедливости следует отметить, что некоторые из них (как то дисковод) находится внутри системного блока компьютера. Результат обработки электронно-вычислительной машиной тоже выводится на внешние устройства, такие как принтер, диски, флеш-накопители и монитор. Подводя итог, можно сказать, что для полноценной работы персонального компьютера должен присутствовать обмен данными. Он и называется вводом/выводом. Чтобы обмен данными мог выполнять возложенные на него функции, должны работать два звена:
Как контроллер работает с персональным компьютером? Для этого необходимо наличие в его ОЗУ соответствующей программы и данных. Попадают они сюда из различных устройств, таких как клавиатура, диски, мыши. Обычно для их обозначения используется термин «внешние». Хотя ради справедливости следует отметить, что некоторые из них (как то дисковод) находится внутри системного блока компьютера. Результат обработки электронно-вычислительной машиной тоже выводится на внешние устройства, такие как принтер, диски, флеш-накопители и монитор. Подводя итог, можно сказать, что для полноценной работы персонального компьютера должен присутствовать обмен данными. Он и называется вводом/выводом. Чтобы обмен данными мог выполнять возложенные на него функции, должны работать два звена:Схематические изображения и их зависимость от специализации
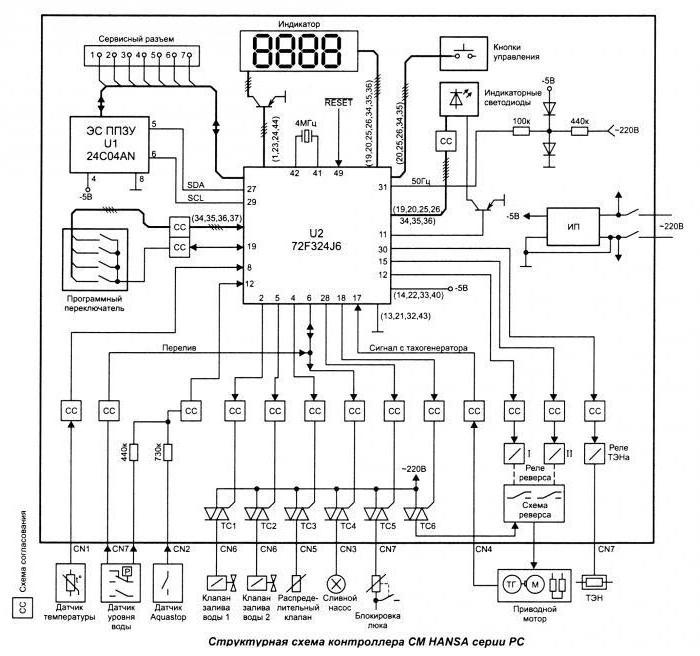
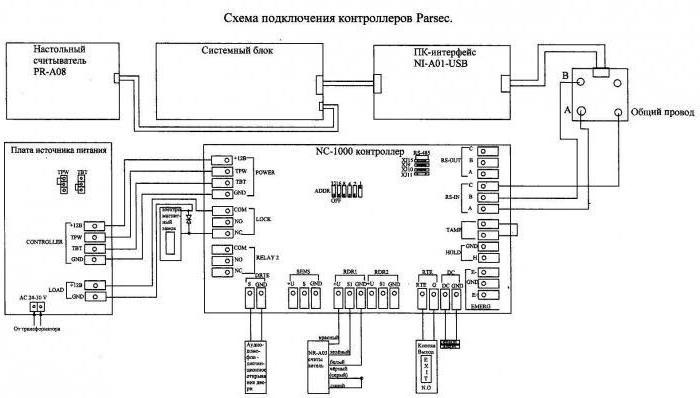
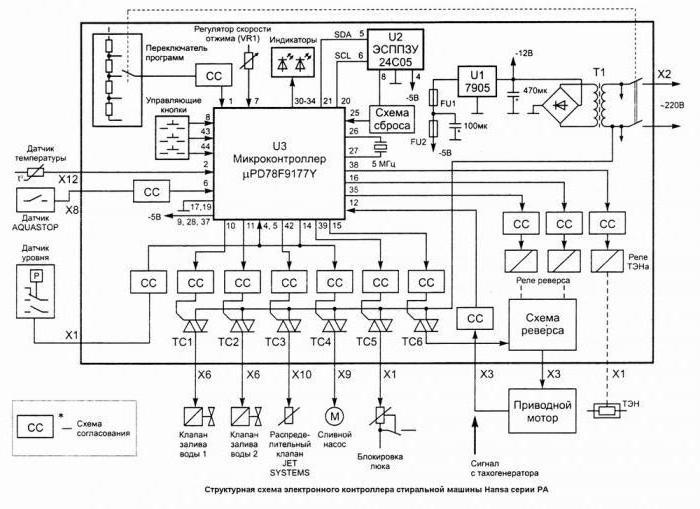
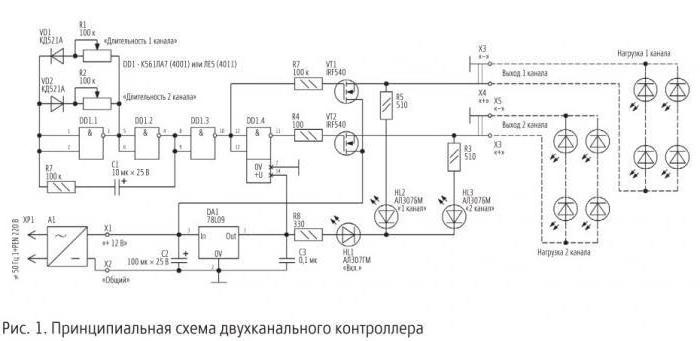 Теперь немного о схемах. Дело в том, что чего-то одного универсального и признанного не существует. Это связано с тем, что контроллеры существуют для разных целей, и они должны выполнять различный функционал. Именно из-за этого и не приходится говорить про их универсальность. Только подумайте, как может контроллер монитора заставить работать принтер, если он не имеет необходимой аппаратной составляющей. Поэтому в рамках статьи все же размещено несколько образцов, но они здесь показаны больше в ознакомительных целях, чтобы иметь представление о том, как данные устройства сконструированы. Но схема контроллера под каждый конкретный случай должна подбираться отдельно.
Теперь немного о схемах. Дело в том, что чего-то одного универсального и признанного не существует. Это связано с тем, что контроллеры существуют для разных целей, и они должны выполнять различный функционал. Именно из-за этого и не приходится говорить про их универсальность. Только подумайте, как может контроллер монитора заставить работать принтер, если он не имеет необходимой аппаратной составляющей. Поэтому в рамках статьи все же размещено несколько образцов, но они здесь показаны больше в ознакомительных целях, чтобы иметь представление о том, как данные устройства сконструированы. Но схема контроллера под каждый конкретный случай должна подбираться отдельно.Заключение
 Итак, мы рассмотрели, что такое контроллер. Как видите, они играют довольно значительную роль в рамках совершенствования таких технических систем, как компьютеры. Конечно, можно обойтись и без них, но тогда придётся говорить о значительных сложностях и падении производственной мощности. Хотя, если посмотреть на каждый контроллер по отдельности, сначала может возникнуть вопрос о том, как такие слабые устройства могут помочь. И действительно, большинство из них обладают незначительными характеристиками, которые могут составлять единицы мегабайтов или даже килобайтов. То есть они могут выполнять даже всего несколько десятков тысяч операций в секунду! Но поверьте, если бы эти задачи были переброшены на центральный процессор, он бы тратил значительно больше из-за сложности организации.
Итак, мы рассмотрели, что такое контроллер. Как видите, они играют довольно значительную роль в рамках совершенствования таких технических систем, как компьютеры. Конечно, можно обойтись и без них, но тогда придётся говорить о значительных сложностях и падении производственной мощности. Хотя, если посмотреть на каждый контроллер по отдельности, сначала может возникнуть вопрос о том, как такие слабые устройства могут помочь. И действительно, большинство из них обладают незначительными характеристиками, которые могут составлять единицы мегабайтов или даже килобайтов. То есть они могут выполнять даже всего несколько десятков тысяч операций в секунду! Но поверьте, если бы эти задачи были переброшены на центральный процессор, он бы тратил значительно больше из-за сложности организации.Программируемые логические контроллеры
Принцип работы контроллеров
Общая схема контроллера
схема, сборка своими руками, виды
Варианты устройств

Экскурс в историю

Контроллер из подручных материалов
Сборка самодельного устройства


Заключение
схема, принцип работы, управление :: SYL.ru
Что такое ШИМ?
Формирование ШИМ-сигналов
Выходное управляющее напряжение (OUT)
Ещё о функциях контроллеров ШИМ
Частота работы устройств, синхронизация
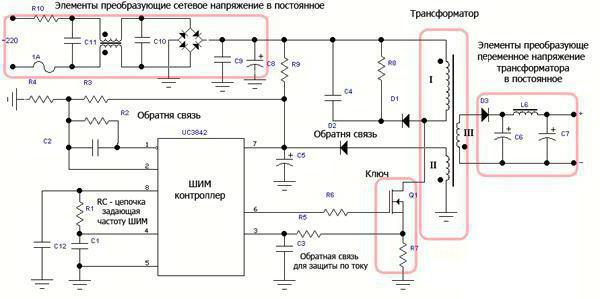
ШИМ-контроллеры в составе блоков питания
Составляющие схемы блоков питания с ШИМ-контроллерами
Основные проблемы ШИМ-преобразователей
Диагностика неисправностей
В заключение
PIC-контроллер. Программирование PIC-контроллеров. Схемы PIC-контроллеров
Что собой представляет PIC-микроконтроллер
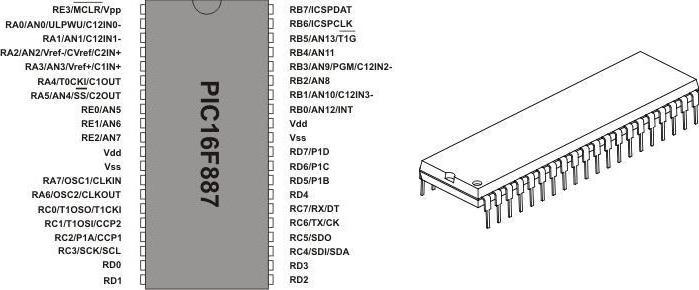
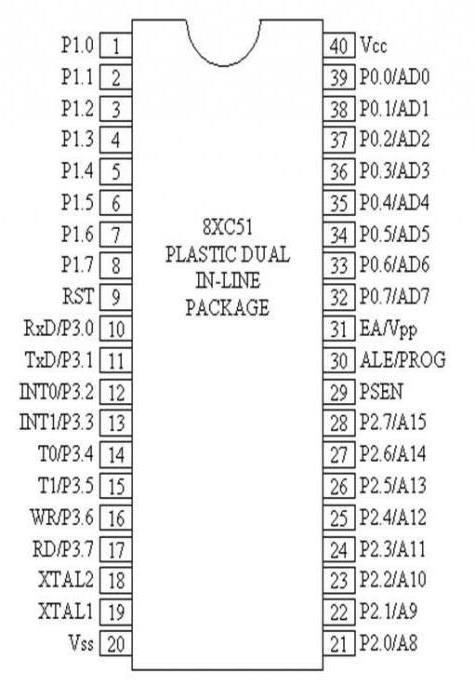
 PIC-контроллер (или микроконтроллер) является средством автоматизации выполнения определённых действий с помощью заранее подготовленной программы. Особенностью представителей этой линейки продукции является легкость в программировании и доступность всех необходимых функций для работы. Обрисовывая его конструкцию, следует заметить, что в его составе присутствует только один кристалл кремния (это характерная особенность всех микроконтроллеров). Кроме него, PIC-контроллер имеет определённое количество ножек. Часть из них могут использоваться как логические входы, часть как выходы, остальные имеют двустороннее применение. Ножки могут быть или цифровыми, или аналоговыми.
PIC-контроллер (или микроконтроллер) является средством автоматизации выполнения определённых действий с помощью заранее подготовленной программы. Особенностью представителей этой линейки продукции является легкость в программировании и доступность всех необходимых функций для работы. Обрисовывая его конструкцию, следует заметить, что в его составе присутствует только один кристалл кремния (это характерная особенность всех микроконтроллеров). Кроме него, PIC-контроллер имеет определённое количество ножек. Часть из них могут использоваться как логические входы, часть как выходы, остальные имеют двустороннее применение. Ножки могут быть или цифровыми, или аналоговыми.Семейства контроллеров
 PIC-контроллер не существует в единичном экземпляре. Компания производитель выпускает значительный ассортимент микроконтроллеров, каждый из которых имеет свои характеристики, возможности и потенциальные цели применения. Количество самих семейств довольно велико и зависит от классифицирующего признака, который берётся как основной. Поэтому стоит сообщить только об основной классификации, в которой есть всего три семейства: 8-, 16- и 32-битные. Они в свою очередь делятся на другие, но поскольку сами семейства не являются темой статьи, то о них и не будет вестись разговор.
PIC-контроллер не существует в единичном экземпляре. Компания производитель выпускает значительный ассортимент микроконтроллеров, каждый из которых имеет свои характеристики, возможности и потенциальные цели применения. Количество самих семейств довольно велико и зависит от классифицирующего признака, который берётся как основной. Поэтому стоит сообщить только об основной классификации, в которой есть всего три семейства: 8-, 16- и 32-битные. Они в свою очередь делятся на другие, но поскольку сами семейства не являются темой статьи, то о них и не будет вестись разговор.Где применяется
Программное обеспечение для работы с PIC-контроллером
 Минимальное необходимое программное обеспечение – это блокнот. Но всё же в силу свободного распространения можно воспользоваться и предлагаемым от компании-производителя программным средством MPLAB. Точнее, линейкой программных средств (среды разработки, компиляторы) MPLAB. Благодаря политике компании он распространяется бесплатно, но имеет определённые ограничения. Так, при краткосрочной демонстрационной версии можно попробовать со всеми возможностями, но после её окончания функционал программы будет урезан. В полноценной программе присутствует значительный инструментарий, который позволяет легко создавать программы, удобно искать различные проблемные участки и проводить оптимизацию кода. В зависимости от версии может быть прекращена функция оптимизации кода или уменьшено количество контроллеров, поддерживаемых программой. Ради правды стоит сказать, что компания оставляет поддержку исключительно самым популярным представителям.
Минимальное необходимое программное обеспечение – это блокнот. Но всё же в силу свободного распространения можно воспользоваться и предлагаемым от компании-производителя программным средством MPLAB. Точнее, линейкой программных средств (среды разработки, компиляторы) MPLAB. Благодаря политике компании он распространяется бесплатно, но имеет определённые ограничения. Так, при краткосрочной демонстрационной версии можно попробовать со всеми возможностями, но после её окончания функционал программы будет урезан. В полноценной программе присутствует значительный инструментарий, который позволяет легко создавать программы, удобно искать различные проблемные участки и проводить оптимизацию кода. В зависимости от версии может быть прекращена функция оптимизации кода или уменьшено количество контроллеров, поддерживаемых программой. Ради правды стоит сказать, что компания оставляет поддержку исключительно самым популярным представителям.Создание программы для PIC-контроллера
 Создавать специальную программу можно с помощью соответствующего программного обеспечения и даже в простом блокноте. Такая возможность существует благодаря тому, что он работает с такими языками программирования, как ассемблер и С. Главное отличие заключается в количестве прописываемой информации и лёгкости задания данных. Можно много услышать о сложности С, но ассемблер ещё сложнее и требует более тщательного подхода.
Создавать специальную программу можно с помощью соответствующего программного обеспечения и даже в простом блокноте. Такая возможность существует благодаря тому, что он работает с такими языками программирования, как ассемблер и С. Главное отличие заключается в количестве прописываемой информации и лёгкости задания данных. Можно много услышать о сложности С, но ассемблер ещё сложнее и требует более тщательного подхода.Программирование с помощью программатора
 Но как перенести разработанную программу в сам микроконтроллер? Как происходит программирование микроконтроллеров? Специально для этой цели существуют специальные устройства – программаторы. Они посылают микроконтроллеру сигналы, которые изменяют ячейки в памяти в соответствии с программой. Для начала процесса перенесения данных необходимо вставить микроконтроллер в программатор, а его, в свою очередь, подключить к компьютеру. Затем с помощью программного обеспечения следует запустить прошивку. Обычно программирование PIC-контроллеров продолжается от тридцати секунд до двух минут.
Но как перенести разработанную программу в сам микроконтроллер? Как происходит программирование микроконтроллеров? Специально для этой цели существуют специальные устройства – программаторы. Они посылают микроконтроллеру сигналы, которые изменяют ячейки в памяти в соответствии с программой. Для начала процесса перенесения данных необходимо вставить микроконтроллер в программатор, а его, в свою очередь, подключить к компьютеру. Затем с помощью программного обеспечения следует запустить прошивку. Обычно программирование PIC-контроллеров продолжается от тридцати секунд до двух минут.Виды программаторов
 Какой программатор выбрать для записи программы на микроконтроллер? Условно можно выделить три вида: самодельные, от компании-производителя и заводские от других компаний. Использование каждого из них имеет свои особенности.
Какой программатор выбрать для записи программы на микроконтроллер? Условно можно выделить три вида: самодельные, от компании-производителя и заводские от других компаний. Использование каждого из них имеет свои особенности.Схематические особенности
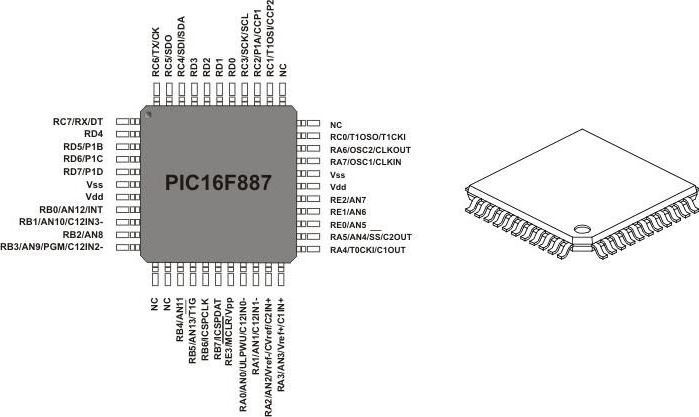
 И напоследок несколько слов о схемах изображений. Следует ориентироваться по ножкам на основании сопроводительной документации, так как схематически часто микроконтроллеры отличаются от реального построения выводов. Главным в таких случаях являются подписанные выводы, и именно по ним и следует ориентироваться при создании устройства.
И напоследок несколько слов о схемах изображений. Следует ориентироваться по ножкам на основании сопроводительной документации, так как схематически часто микроконтроллеры отличаются от реального построения выводов. Главным в таких случаях являются подписанные выводы, и именно по ним и следует ориентироваться при создании устройства.КОНТРОЛЛЕР ЗАРЯДА











1.5.2. Контроллерное управление крановыми двигателями
1.5.3. Схемы непосредственного управления с использованием кулачковых контроллеров

интернет-магазин светодиодного освещения
Пн - Вс с 10:30 до 20:00
Санкт-Петербург, просп. Энгельса, 138, корп. 1, тк ''Стройдвор''






Поделиться с друзьями: