Электропитание Главная Предлагаемый инвертор состоит из микроконтроллера, узла защиты от превышения допустимого тока нагрузки и мощных коммутаторов напряжения на IGBT. управляемых специализированными микросхемами-драйверами. Рис. 1 На рис. 1 представлена схема инвертора.Тактовая частота микроконтроллера задана внешней цепью R5R6C2 Входящим в нее подстроенным резистором R5 можно ее установить такой, чтобы частота сформированного трехфазного напряжения соответствовала требуемой. На выходах RBO-RB5 микроконтроллера формируются сигналы управления узлами А1-A3 - мощными коммутаторами напряжения 300 В. Эти узлы идентичны и построены по стандартной схеме. При желании три установленные в них микросхемы IR2110 можно заменить одной - IR2130 На выходе RB7 микроконтроллера формируются импульсы установки триггера токовой защиты в исходное состояние.Трехфазное напряжение близкой к синусоидальной формы образуется на выходах ХТЗ-ХТ5 инвертора за счет программного изменения соотношения интервалов открытого и закрытого состояний "верхних" и "нижних" плеч коммутаторов А1- A3. В каждой фазе формируется по 36 импульсов переменной длительности на период выходного напряжения Больше, к сожалению, не позволяют ограниченные ресурсы примененного микроконтроллера. Датчиком тока нагрузки инвертора для узла защиты от превышения его допустимого значения служит резистор R10, включенный в общую минусовую цепь питания коммутаторов А1- A3. Если падение напряжения на этом резисторе превысит 1,7 В, изменяется логический уровень напряжения на выходе компаратора DA1, что "перебрасывает" триггер из элементов DD2.1, DD2.2 в состояние с высоким уровнем на выходе элемента DD2.2. Этот уровень, поступая в узлы А1- A3 запрещает работу установленных там микросхем-драйверов, что приводит к немедленному закрыванию всех IGBT и к прекращению тока во всех трех фазах подключенного к инвертору электродвигателя Триггер возвращается в исходное состояние по сигналу микроконтроллера. Порог срабатывания защиты устанавливают подстроечным резистором R1.Источник напряжения 300 В собран по схеме, предложенной Э Мурадханя-ном и Э Пилипосяном в статье "Регулируемый выпрямитель для питания электродвигателей" ("Радио", 2006, №11, с. 40-43) с учетом поправки в "Радио", 2007, № 6, с. 50. Источник был дополнен сетевым фильтром При эксплуатации инвертора важно обеспечить очередность включения питающего напряжения. Первым напряжение 220 В подается на трансформатор Т1 (рис 1) и лишь затем включается напряжение 300 ВИнвертор был проверен при работе с асинхронным трехфазным двигателем мощностью 1 кВт, обмотки которого были соединены треугольником. Форма тока в фазах, проверенная с помощью осциллографа, подключенного через трансформатор тока, оказалась практически синусоидальной. При проверке было выяснено, что пусковой момент на валу двигателя недостаточен, а пусковой ток слишком велик.Тот факт, что выходное напряжение источника 300 В после его включения плавно нарастает в течение приблизительно 3 с, был использован для устранения указанных недостатков путем плавного пуска двигателя. Для этого необходимо изменять частоту трехфазного напряжения пропорционально текущему значению напряжения источника 300 В Чтобы реализовать эту идею, микроконтроллер PIC16F84 был заменен на PIC16F676, имеющий встроенный АЦП. Рис. 2 Схема замены показана на рис. 2.В программу микроконтроллера PIC16F676 введен анализ текущего значения напряжения источника 300 В. При его изменении от 0 до 300 В частота формируемого трехфазного напряжения нарастает от 12 до 50 Гц и в дальнейшем остается равной достигнутому значению. Программы для микроконтроллеров PIC16F84 и РIС 16F676 можно скачать здесь. Автор: А. Титов, г. Сходня Московской обл. Дата публикации: 24.06.2010 Вы можете оставить свой комментарий, мнение или вопрос по приведенному вышематериалу: www.radioradar.net До появления частотных преобразователей на рынке современной энергетики, электромонтёрам приходилось применять для подключения асинхронного двигателя стартовый или фазосдвигающий конденсатор большой ёмкости. Двигатель при этом работал, но существенно терял мощность. Также, применение конденсаторов сильно разогревало обмотки двигателя, что сильно снижало его ресурс работы, и двигатели часто приходилось «перематывать». Учитывая, что обмотки асинхронного двигателя делаются из медной проволоки, то такие ремонты приносили большой ущерб. Так как асинхронный двигатель является составной частью почти каждого современного привода, то вопрос создания частотного регулирования вставал на особый уровень. И вот, частотники уже повсеместно применяются для подключения электрического двигателя к сети и его управление. По сути, частотный инвертор, это прибор, изменяющий частоту поданного на обмотки напряжения с ШИМ-регулированием. Благодаря частотнику, получилось подключить асинхронный двигатель к сети без ущерба его ресурсу, без перегрева, и ещё дать массу возможностей по управлению скоростью вращения вала. Также, применяя различные интерфейсы передачи данных и команд, применение частотников позволило объединить все приводы большого предприятия в одно диспетчерскую систему управления и контроля параметров. В мир современной автоматизации технологических процессов, это весомый аргумент. Современный частотный инвертер состоит из двух принципиальных блоков. Первый блок полностью сглаживает напряжение и на выходе выдаёт постоянное. Постоянное напряжение подаётся на силовой блок генерации частоты. После преобразования, на выходе из второго блока частота напряжения уже будет такая, какая задана настройкой. За возможность изменять частоту напряжения отвечает микропроцессор, который встроен в частотник. Используя заданную программу, процессор следит за выходной частотой напряжения, а также за параметрами работы электрического двигателя. По сути, частотные преобразователи для асинхронных двигателей принцип работы которых заключён в простом вырабатывании нужной частоты переменного тока, это модуляторы нужной природы напряжения, которая необходима для того или иного оборудования. Именно это и снизило негативное влияние на работу электрического двигателя, которое имело место быть при использовании конденсатов. Электрический двигатель получает именно такое напряжение, которое положено ему для нормальной и полноценной работы. Считаем нужным отметить, что и при наличии линии трёхфазного напряжения, не всегда рационально подключать электрический двигатель к сети просто через выключатель. В таком случае, двигатель будет работать, но регулировать его работу не получится. Не получится и следить за состоянием обмоток. В промышленном исполнении можно встретить два основных типа частотных преобразователей: Специальный частотный преобразователь для асинхронного двигателя, схема которого несколько отличается от универсального, изготавливается под конкретное оборудование по конкретным потребностям. Как правило, это очень урезанные версии, не способные на работу с любым оборудованием. Универсальные частотные инвертера могут работать, как и в специальном оборудовании, так и во всех остальных вариантах применения. На то они и универсальные, что их можно настраивать и программировать под любые нужды. Поэтому, выбор частотного преобразователя для асинхронного двигателя должен быть не столько продиктован конкретными необходимостями производства, но и возможностью модернизации оборудования. Практически во всех частотниках сегодня реализована возможность установки и контроля режима работы электрического двигателя с пульта управления. Первый интерфейс управления встроен в сам корпус частотника. Там же есть и ручка регулирования скорости вращения двигателя. Но можно и применять выносные пульты управления. Которые можно располагать как в диспетчерской, так и непосредственно на станке, который приводится в движение электрическим двигателем.Такое чаще встречается в ситуациях, когда станок с двигателем находится в помещении, где не рекомендуется установка частотного инвертора. И его устанавливают вдали от оборудования. Большая часть инвертеров частоты позволяют программировать работу оборудования. Но, задать программу просто с пульта управления не получится. Для этого используется интерфейс передачи данных и настройки, который, при помощи компьютера позволяет задать нужную программу работы. При проектировании цеха очень важно учитывать, что общение частотных преобразователей с диспетчерским пультом будет происходить при помощи электрических импульсов по проводам связи. Пи этом, не стоит забывать, что разные стандарты связи по-разному влияют друг на друга. Посему, переда данных одним способом, может существенно снижать качество передачи данных другим способом.Поэтому, расчет частотного преобразователя для асинхронного двигателя должен производиться не только по его электротехническим показателям, но и по показателям совместимости с сетью. Вопрос мощности частотника, скорее всего, стоит на первом плане, при расчете привода для любого станка или агрегата. Дело в том, что большинство частотных инвертеров способны выдерживать большие перегрузки до 200 – 300 %. Но, это совсем не означает, что для питания электрического двигателя можно смело покупать частотник сегментом ниже, чем требуется по планированию. Выбор мощности частотного преобразователя осуществляется с обязательным запасом в 20 – 30%. Игнорирование этого правила может повлечь за собой выход из строя частотного преобразователя и простой оборудования. Также важно учитывать пиковые нагрузки, которые может выдерживать частотник. Дело в том, что при старте электрического двигателя его пусковые токи могут сильно превышать номинальные. В некоторых случаях, пусковой ток превышает номинальный в шесть раз! Частотик должен быть рассчитан на такие изменения. Каждый электрический двигатель оборудован вентилятором охлаждения. Это лопасти, которые установлены в задней части двигателя и по мере вращения вала прогоняют через корпус мотора воздух. Если электрический двигатель работает на пониженных оборотах, то мощности потока воздуха может не хватить для охлаждения. В этом случае, нужно выбирать частотник с датчиками температуры двигателя. Или организовать дополнительное охлаждение. При расчёте и подключении частотника к сети и электрическому двигателю, следует помнить, что он очень подвержен помехам. Также, преобразователь частоты может и сам стать источником помех для другого оборудования. Именно поэтому, все подключения к частотнику и от него выполняются экранированными кабелями и выдерживанием дистанции в 10 см друг от друга. По своей сути, применение частного преобразователя для питания асинхронного электрического двигателя позволило существенно продлить жизнь электрического двигателя, дало возможность регулировать работу двигателя и хорошо экономить на расходе электрической энергии. Частотник, частотный преобразователь1ф 220 — 3ф220 для асинхронного электродвигателя chistotnik.ru Трёхфазный двигатель Рис.2 График трёхфазного тока Рис.3 Соединение обмоток статора по схеме "звезда" и "треугольник" Рис.4 Структурная схема инверторного преобразователя Данный преобразователь имеет ярко выраженное звено постоянного тока. Переменное напряжение сети преобразуется при помощи диодного моста в постоянное, сглаживается индуктивностью (L) и ёмкостью (C), термистор (NTC) служит для защиты схемы от токовых перегрузок. Индуктивность и ёмкость в выпрямителе служат также фильтром, который защищает сеть от пульсаций при коммутации двигателя. От переменной сети так же работает импульсный блок питания, который формирует пониженное постоянное напряжение различных значений для питания системы управления. С выхода выпрямителя постоянное напряжение поступает на силовую часть инвертора построенную на IGBT ( Insulated Gate Bipolar Transistor — биполярный транзистор с изолированным затвором ). На структурной схеме IGBT позиционированы как Q1, Q2, Q3, Q4, Q5, Q6. В корпус данных транзисторов интегрирован диод включённый между цепью эмиттера и коллектора, который защищает транзистор от излишних токовых перегрузок возникающих при коммутации обмоток электродвигателя. В инверторе осуществляется преобрaзовaние постоянного нaпряжения в трехфaзное (или однофaзное) импульсное нaпряжение изменяемой aмплитуды и чaстоты. По сигнaлaм системы упрaвления, кaждaя обмоткa электрического двигaтеля подсоединяется через соответствующие силовые трaнзисторы инверторa к положительному и отрицaтельному полюсaм звенa постоянного токa. Сигналы управления поступают на затворы транзисторов с драйверов (микросхем управления) IR1, IR2, IR3. Сигнал на драйверы приходит с цифрового сигнального процессора ( DSP-Digital signal processor ) системы управления. Такие процессоры специально разработаны для управления двигателями. Длительность подключения кaждой обмотки в пределaх периодa следовaния импульсов модулируется по синусоидaльному зaкону. Чем выше частота преключения транзисторов, тем выше скорость вращения ротора трёхфазного двигателя, поэтому этот метод управления двигателя называют частотным. Реверсивное вращение двигателя осуществляется за счёт изменения порядка включения транзисторов инвертора.Алгоритм системы управления двигателем заложен в цифровом сигнальном процессоре. Тахогенератор (Т) (Рис.4) расположенный на валу двигателя является звеном обратной связи между двигателем и блоком управления, благодаря чему, поддерживается необходимая стабильная скорость вращения двигателя на различных этапах работы стиральной машины. По сигналу с тахогенератора определятся дисбаланс барабана на стадии отжима, а в некоторых моделях стиральных машин происходит даже примерное взвешивание белья, за счёт сравнения характера сигналов тахогенератора при пустом и заполненным бельём барабане.Подобные критерии сигналов тахогенератора, записаны в программе процессора системы управления двигателем или в микросхеме памяти блока управления. В качестве дополнения, ко всему описанному в этом пункте, представим внешний вид и расположение некоторых компонентов инверторных блоков управления для стиральных машин. Существует три основных вида:1.Единый блок управления (инвертор и управление остальными элементами стиральной машины совмещены в общий модуль) (Фото 1)2.Отдельный блок для управления 3-х фазным двигателем (Фото 2)3.Блок управления (инвертор) расположен на самом двигателе Фото 2. Отдельный блок для управления 3-х фазным двигателем Рис.6 Схема соединения частей трёхфазного двигателя с контактной колодкой Большая часть неисправностей связанная с некорректной работой двигателей, заключается в неисправности самой системы управления. При неисправности системы управления, двигатель может вращаться рывками или наблюдается нестабильная частота вращения ротора, а иногда он вовсе не вращается. Блок управления трёхфазным двигателем может быть выполнен в виде отдельного модуля или совмещён с общим модулем управления стиральной машины. Невозможно полноценно проверить работоспособность или напрямую включить трёхфазной двигатель стиральной машины без подключения к электронной схеме. При помощи мультиметра представляется возможным проверить лишь целостность цепи обмоток статора двигателя, пробой обмоток на корпус, электрическое сопротивление катушки тахогенератора и тепловое защитное устройство. К недостаткам стоит отнести лишь сложную электронную систему управления двигателем. Материал подготовлен сервисной службой "Аквалюкс" www.a-qualux.ru Довольно часто у многих радиолюбителей или просто хозяйственных людей возникает необходимость в регулировании частоты вращения трехфазного двигателя. Использовать для этого банальный регулятор мощности нет смысла, потому что он построен на принципе изменения напряжения, а ведь, как известно, двигатели переменного тока не хотят регулироваться таким способом, даже однофазные. Обороты, конечно, будут изменяться, но только в небольшом и практически незаметном пределе, после чего при достижении нижнего порога, а при питании 220 В при напряжении 150 В, обороты и вовсе останавливаются. Если с вала необходимо получит еще и нормальный момент, например, при регулировании скорости движения конвейера или протяжной рейки, в зависимости к чему он подключен, то подойдет только частотный преобразователь. Под понятием частотное преобразование, а далее и частотный преобразователь, следует понимать целую систему, которая нечто делает. А именно преобразует частоту питающего обмотки асинхронного двигателя напряжения. То есть акцентируем ваше внимание на том, что здесь изменяется не напряжение, а именно его частота. В таком режиме управления момент на валу двигателя сохраняется при изменении его скорости вращения. Но чтобы сделать преобразователь частоты своими руками, необходимо вспомнить конструкцию и возможные характеристики работы асинхронных двигателей. Более того, решая конкретно изготовить такое устройство, первым делом необходимо найти подходящий по параметрам двигатель, который справится с возлагаемой на него работой в составе готового комплекса. Для проектирования самодельного частотника сначала стоит вспомнить, что такое асинхронный двигатель и как он работает. Несинхронный двигатель или ДПТ представляет собой механическое устройство, состоящее из статора с обмотками возбуждения и ротора. Второй компонент может быть: Принцип действия двигателя очень прост и заключается во влияние создаваемого в статоре вращающегося магнитного поля на короткозамкнутый ротор, в котором возникает ЭДС. Из-за этого в роторе начинает протекать ток, что ведет к образованию сил, взаимодействующие с магнитным полем статора. При этом частота вращения ротора и магнитного поля неравны, оттого и название асинхронный двигатель. Разумно предположить, что если изменить частоту питающего статор напряжения, то и измениться скорость вращения ротора. На деле оно так и есть, поэтому все серьезные компании используют именно частотные преобразователи для управления такими моторами. Когда проектируется схема частотного преобразователя для электродвигателя своими руками, следует учесть тип мотора и все его характеристики. В частности, мощность, число полюсов и максимальную скорость вращения. Скачать готовые схемы можно с интернет-журнала «Радиокот». Там их представлено очень много. Для получения вращающегося магнитного поля трехфазного, необходимо через виток катушки на статоре пропустить ток с необходимой частотой, который будет определяться по формуле: iA = I m sinωt. В результате действия этого тока по оси витка начинает действовать МДС FA. Так как витки в статоре чередуются по фазам, то и пульсация будет иметь такой же характер, создавая общую пульсирующую силу F, являющеюся константой. Она определяется как корень из квадратов сил в двух витках, смещенных относительно друг друга под углом 90ºС. В результате чего возникает вращение поля с угловой скоростью, выраженную формулой для каждого витка в отдельности: ω =2π f 1. Но для расчета скорости поля во всей машине необходимо учитывать общее количество пар полюсов, выраженное символом p. И тогда скорость поля будет равна: ω 0 =2π f 1 /р. Соответственно, можно высчитать и частоту вращения, выраженную в об/мин: n0 =60 f 1 /р. Кроме этих данных, необходимо помнить, что характеристики будут отличаться от режима в холостом ходе, то есть при ω = ω 0, и при нагрузке, когда ω ≠ ω 0. А также было бы полезным вспомнить, что под нагрузкой возникает такое понятие, как скольжение, которое появляется из-за отставания ω от ω 0. И оно выражается как: s =( ω 0 — ω)/ ω 0. Это говорит о том, что при построении САУ с увеличением этой величины необходимо автоматически изменять частоту напряжения в обмотках, чтобы обеспечить стабильность скорости при различных нагрузках. Все промышленные частотники обеспечивают различные принципы регулирования скоростью и моментом на валу асинхронных двигателей за счет изменения не только частоты, но и сдвига фаз, времени нарастания управляющих импульсов, динамическим торможением и многими другими параметрами. При этом все это выполняется в автоматическом режиме без дополнительного участия извне. Поэтому промышленная схема частотного преобразователя для трехфазного двигателя состоит из следующих компонентов: Трехфазный двигатель может быть оснащен датчиком, тогда требуется обратная связь. Датчик может быть оптическим, индуктивным или магнитным. В высоко оборотистых двигателях расчет скорости ведется программно на основании характеристик. Недаром человек стал активно применять частотные преобразователи на всех видах предприятий и даже в быту, потому что они намного более экономичны, чем коллекторные двигатели и могут работать в таких условиях, в которых двигатель со щетками быстро выйдет из строя. Кроме всего этого, использование частотного преобразователя дало возможность заменить механические вариаторы с приводными системами, что позволило намного упростить конструкцию оборудования. А учитывая, что ДПТ при работе практически не требует ремонт, то использование ПЧ является просто идеальным решением. Но следует понимать, что есть пределы регулирования, при которых принцип управления асинхронным двигателем также будет изменяться: В любом случае, когда двигатель планируется применять в тяжелых условиях работы, что обычно и бывает, то лучше использовать именно векторное регулирование. Чтобы построить качественную систему САУ с управлением асинхронным двигателем, необходимо хорошо разбираться в понятиях, а именно в векторном регулировании или частотном регулировании. Частотный принцип применяется в системах, где нет надобности жестко контролировать скорость, а важен создаваемый двигателем поток без значительной нагрузки. Но когда требуется с первого оборота обеспечить высокий момент и хорошее тяговое усилие, то следует использовать векторное управление. Векторные САУ также применяются в следящих системах с небольшими скоростями подач. Например, в станках для подачи столов или шпиндельных суппортов. Здесь не только надо преодолеть инерцию станины, но и обеспечить необходимое усилие при обработке детали. Проектируя частотник для трехфазного электродвигателя своими руками, необходимо учитывать тип нагрузки, потому что от этого будет зависеть и характеристика управления силовыми ключами для достижения необходимой мощности при минимальных потерях. Вот мы и подошли к построению блок-схемы управления асинхронным электродвигателем. И сразу стоит уверить, что практически все производители этого вида преобразователей используют одну и ту же блоку схему, которая может быть применена и вами для конструирования собственного преобразователя. И она состоит из следующих компонентов: Следует сказать, что производители долго шли к созданию идеальной ШИМ, с помощью которой можно было бы стабильно управлять двигателем. И только с появлением IGBT — модулей это стало возможным. Поэтому и для построения своего преобразователя рекомендуется использовать ключи с напряжением не менее 1200 В с учетом возможных пульсаций сети и с хорошим запасом по току. На рынке вполне можно отыскать транзисторы и модули до 100 и более А. Упрощенная блок схема преобразователя будет выглядеть следующим образом: Расчетное напряжение промежуточного контура в √2 раз больше U N. После достижения на шине необходимого уровня постоянного напряжения резистор шунтируется контактной парой. Последний блок в схеме – инвертор. Это окончательный формирователь выходных импульсов, которые затем поступают на двигатель, обеспечивая его вращение с заданной скоростью. Обобщенное строение силового модуля показано на следующем рисунке: Для построения инвертора применяются высоко токовые транзисторы, работающие в чисто переключающем режиме. В процессе работы они сильно нагреваются, поэтому устанавливаются на больших радиаторах с большой площадью рассеивания тепла. Для проектирования схемы управления инвертором, необходимо себе четко представить порок работы ключей. Для этого обратите внимание на рисунок ниже: На нем представлены временные интервалы для каждого из ключей, установленных именно в таком порядке, как было показано на прошлом рисунке. То есть в фазе U работают транзисторы Т1 и Т4, в фазе V – Т3 и Т6 и так далее. Для каждой из обмоток двигателя свая пара IGBT. При построении ПЧ для маломощных моторов с небольшими токами можно использовать простые биполярные или полевые транзисторы. На временной диаграмме видно, что в первый момент времени открываются транзисторы Т1, Т5 и Т6. Далее, транзистор Т1 и Т6 продолжают быть открытыми, в то время, как Т5 закрывается и открывается Т2 и так далее. Эта диаграмма полностью повторяет диаграмму напряжений в 3-фазной сети, но только импульсы имеют прямоугольную форму и имеют заданную контроллером частоту. В результате получается своего рода циклическое переключение транзисторов, при этом ток в фазах получается сдвинут на 120º относительно друг друга. А для получения управляющего напряжения, состоящего из множества импульсов, в виде синусоидального сигнала с минимальным числом гармоник, пользуются отношением времени включения и выключения транзисторов. Чтобы минимизировать потери в двигателе, которые обычно возникают при попытках регулирования за счет уменьшения напряжения на обмотках двигателя, прибегают к увеличению частоты. Для изменения скорости вращения вала двигателя необходимо изменить частоту f 1, но делать это следует осторожно. Ведь необходимо сохранить ток намагничивания неизменным. Для поддержания этого баланса U 1 должны быть пропорционально f 1. но если баланс нарушен, то ток намагничивания будет либо уменьшаться, либо увеличиваться. Соответственно, поле будет ослабляться или перенасыщаться. Чтобы обеспечить это u / f -характеристику выбирают линейной до достижения угловой частоты. Она наступает тогда, когда напряжение на обмотках повышается до максимальной отметки. elektro.guru Текущая версия устройства трехфазного инвертора (далее инвертор) представляет собой усовершенствованный и модифицированный вариант системы управления двигателями, основанный на предыдущих подобных разработках кафедры Машин и аппаратов Хмельницкого национального университета. Внешний вид платы инвертора изображен на рисунке 1 и 2. -> Украинская версия <- Рисунок 1. Внешний вид платы трехфазного инвертора (верхний слой) Рисунок 2. Внешний вид платы трехфазного инвертора (нижний слой) Данный инвертор предназначен для осуществления управления работой электрическими двигателями, такими как: Трехфазные асинхронные двигатели; Однофазные асинхронные двигатели; Коллекторные двигатели; В зависимости от типа двигателя используется различные режимы управления, для чего предназначено соответствующие программное обеспечение. Для двигателей, содержащие одну или две фазы используется два плеча драйвера из трех – режим инверсного Н-моста. Всего возможно подключение двигателей, электрическая обмотка которых содержит от одного до трех фаз. Исключение составляют двухфазные (биполярные) шаговые двигатели, электрическая схема управления которых содержит две независимые обмотки. Управление таким двигателем предполагает наличие драйвера, который давал бы возможность осуществлять переполюсовку тока в каждой из этих обмоток. Устройство данного инвертора представляет собой комплектующую часть для нужной конечной системы управления, которая, кроме текущей платы, должна включать в себя источник питания и систему управления с интерфейсом ввода-вывода данных. В качестве системы управления и интерфейса ввода-вывода может служить компьютер, для подключения которого на плате инвертора предусмотрен разъем интерфейса RS-232. Возможен также работа платы инвертора в режиме демонстрации, с выполнением некоторых основных функций, например, запуск двигателя, остановка, реверс, изменение скорости. Для осуществления управления этим режимом на плате инвертора предусмотрены четыре кнопки управления. Также к дополнительным функциям платы инвертора относятся следующие, – это возможность подключения датчиков обратной связи, например, для управления трехфазными двигателями постоянного тока с датчиками Холла, возможность подключения тахометра для контроля скорости вращения двигателя и возможность подключения охлаждающего вентилятора. Печатная плата инвертора изготовлена в двухслойном исполнении с защитным покрытием (маской). На верхнем слое находится большинство электрических сигнальных проводников (рисунок 3) и запаяны почти все электрические компоненты (рисунок 4). На нижнем слое размещены в основном полигоны питания (рисунок 5) и запаянные силовые транзисторы для возможности удобного монтажа теплоотводящего радиатора (рисунок 6). Рисунок 3. Верхний слой платы инвертора (электрические проводники) Рисунок 4. Верхний слой платы инвертора (электрические компоненты) Рисунок 5. Нижний слой платы инвертора (электрические проводники) Рисунок 6. Нижний слой платы инвертора (электрические компоненты) Всю систему данного инвертора можно разделить на следующие основные части (узлы): Узел питания; Узел контроля; Узел ввода-вывода; Узел мониторинга: Рассмотрим кратко каждый из них. Узел питания состоит из четырех линейных стабилизаторов напряжения на 3.3В, 5.0В, 12.0В и 15.0В соответственно (Рисунок 7). Рисунок 7. Узел питания инвертора Стабилизатор напряжения на 3.3В используется для питания управляющего контроллера и всей логики схемы инвертора, на 5.0В – для питания датчика тока, на 12.0В – питание охлаждающего вентилятора и на 15.0В – питание для драйвера силовых ключей. Узел контроля – это собственно программируемый контроллер (рисунок 8), выполняющий все функции ввода-вывода и управления самым драйвером двигателя. Для программирования последнего на плате предусмотрен специальный ISP разъем. Рисунок 8. Узел контроля инвертора Узел ввода-вывода включает в себя следующие элементы, такие как кнопки управления (рисунок 9), интерфейс RS232 (рисунок 10), светодиоды, логику управления вентилятором и тахометром, клеммы для подключения входных сигналов. Рисунок 9. Узел ввода-вывода инвертора (кнопки управления) Рисунок 10. Узел ввода-вывода (интерфейс RS232) Узел мониторинга включает в себя датчик тока (рисунок 11) и температуры (рисунок 12). Первый и второй аналогового принципа действия, считывания и преобразования в значения тока и температуры выполняет контроллер с помощью интерфейсов АЦП. Рисунок 11. Узел мониторинга инвертора (датчик тока) Рисунок 12. Узел мониторинга инвертора (датчик температуры) Узел драйвера включает в себя всю логику управления собственно двигателем. К ней относится гальваническая развязка (рисунок 13), драйвер силовых транзисторов (рисунок 14) и сами силовые транзисторы (рисунок 15). Рисунок 13. Узел драйвера инвертора (гальваническая развязка) Рисунок 14. Узел драйвера инвертора (драйвер силовых транзисторов) Рисунок 15. Узел драйвера инвертора (силовые транзисторы) Для питания всей схемы инвертора нужно три независимых (гальванически развязаны ) источника питания. Первое – питание всей логики схемы управления, не включая драйвер силовых транзисторов. Последний источник должен быть с выходным напряжением в рекомендованном диапазоне 17-20В, ток потребления схемы инвертора по текущему питанию не более 40 мА. Второе – питание драйвера силовых транзисторов, должно быть с выходным напряжением в рекомендованном диапазоне 17-20В, ток потребления схемы инвертора по текущему питанию не более 10 мА. Третье – питание для собственно двигателя, которым нужно управлять. Напряжение и ток, которые должны быть обеспечены текущим источником зависят от мощности двигателя. В электрической схеме инвертора заложены силовые IGBT транзисторы, обеспечивающие максимальное падение напряжения между коллектором и эмиттером – 600В, и длительный ток коллектора при комнатной температуре – 60А . Программа разработана для текущего контроллера инвертора предусматривает возможность выбора типа двигателя, которым нужно управлять с помощью директив следующих компиляции. //#define MOTOR_STEP_3PH
//#define MOTOR_VENT_3PH_HALL
//#define MOTOR_DC
//#define MOTOR_STEP_3PH_N
#define MOTOR_AC_3PH
//#define MOTOR_AC_1PH //#define MOTOR_STEP_3PH //#define MOTOR_VENT_3PH_HALL //#define MOTOR_DC //#define MOTOR_STEP_3PH_N #define MOTOR_AC_3PH //#define MOTOR_AC_1PH В зависимости от выбранной директивы компилятор настраивает программу под определенный тип двигателя, удаляя ненужные или вставляя нужные функции и отдельные части программы. Согласно контроллер платы инвертора сразу прошивается для управления соответствующим типом двигателя. Чтобы изменить программу управления для работы в другой системе с другим типом двигателя требуется следующее перепрограммирования инвертора. На рисунке 16 показан внешний вид компьютерной программы, которая была разработана для управления работой асинхронными двигателями. Рисунок 16. Внешний вид компьютерной программы управления асинхронными двигателями Данная программа позволяет осуществлять демонстрацию управления асинхронным двигателем с задачей частоты синусоиды, которую генерирует драйвер, частоту самого ШИМ сигнала, включать / выключать защиту по превышению допустимого тока и температуры с задачей критических значений и периода считывания, время разгона / торможения и направление вращения. Также можно передавать отдельные независимые команды с задачей количества байт для возможности тестирования программы контроллера, считывать ток и температуру с датчиков. На момент написания текущей статьи разработана система инвертора ни была применена в составе конечной системы управления или стенда. Текущая электрическая плата инвертора предназначена для управления трехфазными асинхронными двигателями в системе открытого исполнения с целью исследования частотных и потребляемых характеристик двигателя в лабораториях Хмельницкого национального университета. Для таких исследований используется отдельная система с АЦП устройством под контролем среды программирования Lab View от компании National Instruments. Автор: Сергей Корсун, ХНУ (2010 г. вып.), г. Хмельницк. fpga.in.ua Применяется преобразователь частоты для асинхронного двигателя в нескольких случаях. Во-первых, для изменения скорости вращения ротора. Во-вторых, для осуществления настроек, например времени торможения и разгона, изменения степени защиты. В-третьих, для преобразования однофазного напряжения в трехфазное. Не всегда есть возможность реализовать питание асинхронного двигателя от трехфазной сети. А для его нормальной работы и достижения максимальной мощности требуется именно такая сеть. К сожалению, в частных домах сделать трехфазное напряжение достаточно сложно. А преобразователь частоты позволяет осуществить правильное питание двигателя. Любой преобразователь, даже самый сложный по конструкции, имеет в своем составе несколько блоков. Первый – это выпрямительный каскад, который служит для преобразования переменного тока в постоянный. В зависимости от того, от какой сети производится питание, необходимо использовать различные схемы выпрямителей. Так, при включении в сеть переменного однофазного тока достаточно использовать однополупериодный выпрямитель. Стоит заметить, что ротор асинхронного двигателя имеет короткозамкнутые витки, поэтому в питании не нуждается. Реализовать его можно при помощи одного полупроводникового диода. Но лучшими характеристиками обладает мостовой выпрямитель: потерь напряжения меньше. В качестве полупроводника используется кремний. Если решите самостоятельно изготовить преобразователь частоты для асинхронного двигателя, то для выпрямителя необходимо осуществлять подбор элементов по величине обратного тока, проводимости. Это позволит улучшить характеристики устройства. После выпрямительного каскада следует блок фильтров. В простейшем варианте это индуктивность (дроссель), включенная в разрыв плюса. Между плюсом и минусом включается электролитический конденсатор. С его помощью проводится избавление от всех переменных составляющих, которые остаются в выпрямленном напряжении. В результате убираются все пульсации. Если подключить выход фильтра к осциллографу и взглянуть на монитор, то можно увидеть, что линии прямые, без лишних пульсаций. Но схема асинхронного двигателя такова, что запитывать его можно только переменным током. А на выходе фильтра возникает постоянный. Следовательно, требуется вернуть все на круги своя, сделать из постоянного напряжения переменное. Причем его значение должно быть 220 вольт (при замере между фазой и нулем). А количество фаз – три. Только при этом условии получится обеспечить работу асинхронного двигателя в нормальном режиме. Данный каскад служит для преобразования постоянного тока в переменный. Именно в этом блоке можно проводить регулировку и изменение параметров тока на выходе. Основа инвертора – это мощные транзисторы. Любой современный преобразователь частоты для асинхронного двигателя в этом каскаде содержит сборку из шести IGBT-транзисторов. Всего используется по два полупроводника на каждую фазу. Управление ими производится по базе, включение p-n-переходов произведено последовательно. В точке их соединения снимаются три фазы. Это видно из структурной схемы, приведенной выше. При изготовлении преобразователя частоты или проведении ремонта требуется осуществлять подбор силовых сборок по выходному току. Пожалуй, это единственный параметр, которого нужно придерживаться. Также следует учитывать возможности микропроцессорной системы управления. Не все сборки транзисторов позволяют изменять те или иные характеристики инверторного каскада. Поэтому при выборе силовых транзисторов обратите внимание на возможность управления. В основе лежит несложный микроконтроллер, который и обеспечивает работу всей системы. Это небольшая микросхема, которая может иметь как 16 выводов, так и 32, и 64, и 128. Все зависит от того, сколько портов ввода-вывода имеется. Для управления преобразователем частоты необходимо контролировать несколько параметров. Во-первых, производить отключение при превышении температуры корпуса ПЧ. Во-вторых, включать вентиляторы при достижении некоторого значения температуры. В-третьих, проводить замер тока на каждой фазе выходного каскада. Частота асинхронного двигателя должна изменяться, делается это при помощи установленного переменного резистора. Если контроль температуры производится при помощи простейших датчиков, то для защиты по току необходимо использовать специальные трансформаторы. Они так и называются – трансформаторы тока. Это небольшие катушки на магнитопроводе, сквозь который проходит вывод фазы. Следовательно, остается только составить несложные алгоритмы, о которых будет рассказано ниже. Что касается программирования функций, то для этой цели необходимо предусмотреть подключение к микроконтроллеру нескольких кнопок с нормально разомкнутыми контактами. При самостоятельном изготовлении ПЧ потребуется использовать множество знаний, включая и программирование. Так, преобразователи частоты для двигателей должны иметь защиту. Следовательно, при составлении алгоритма работы микроконтроллерной системы управления необходимо прописать определенные параметры, при которых происходит аварийное отключение устройства. Например, указывается предельно допустимое значение температуры корпуса устройства, а также тока, протекающего в каждой фазе на выходе. Кроме того, необходимо учесть, что при нулевом значении потребляемого тока в одной фазе (при условии, что в других больше) должно производиться аварийное отключение. Исходя из всего этого, нужно составить алгоритм работы, который записывается в микроконтроллер. Именно по этой схеме устройство и будет работать. Преобразователь частоты для асинхронного двигателя должен также изменять скорость вращения ротора. Переменный резистор подключаете через делитель напряжения к порту ввода-вывода. В алгоритме следует учесть, что при изменении сопротивления на данном входе контроллера нужно увеличивать или уменьшать частоту вращения ротора. fb.ru Рис. 1 На рис. 1 представлена схема инвертора. Тактовая частота микроконтроллера задана внешней цепью R5R6C2 Входящим в нее подстроенным резистором R5 можно ее установить такой, чтобы частота сформированного трехфазного напряжения соответствовала требуемой. На выходах RBO-RB5 микроконтроллера формируются сигналы управления узлами А1-A3 - мощными коммутаторами напряжения 300 В. Эти узлы идентичны и построены по стандартной схеме. При желании три установленные в них микросхемы IR2110 можно заменить одной - IR2130 На выходе RB7 микроконтроллера формируются импульсы установки триггера токовой защиты в исходное состояние. Трехфазное напряжение близкой к синусоидальной формы образуется на выходах ХТЗ-ХТ5 инвертора за счет программного изменения соотношения интервалов открытого и закрытого состояний "верхних" и "нижних" плеч коммутаторов А1- A3. В каждой фазе формируется по 36 импульсов переменной длительности на период выходного напряжения Больше, к сожалению, не позволяют ограниченные ресурсы примененного микроконтроллера. Датчиком тока нагрузки инвертора для узла защиты от превышения его допустимого значения служит резистор R10, включенный в общую минусовую цепь питания коммутаторов А1- A3. Если падение напряжения на этом резисторе превысит 1,7 В, изменяется логический уровень напряжения на выходе компаратора DA1, что "перебрасывает" триггер из элементов DD2.1, DD2.2 в состояние с высоким уровнем на выходе элемента DD2.2. Этот уровень, поступая в узлы А1- A3 запрещает работу установленных там микросхем-драйверов, что приводит к немедленному закрыванию всех IGBT и к прекращению тока во всех трех фазах подключенного к инвертору электродвигателя Триггер возвращается в исходное состояние по сигналу микроконтроллера. Порог срабатывания защиты устанавливают подстроечным резистором R1. Источник напряжения 300 В собран по схеме, предложенной Э Мурадханя-ном и Э Пилипосяном в статье "Регулируемый выпрямитель для питания электродвигателей" ("Радио", 2006, №11, с. 40-43) с учетом поправки в "Радио", 2007, № 6, с. 50. Источник был дополнен сетевым фильтром При эксплуатации инвертора важно обеспечить очередность включения питающего напряжения. Первым напряжение 220 В подается на трансформатор Т1 (рис 1) и лишь затем включается напряжение 300 В Инвертор был проверен при работе с асинхронным трехфазным двигателем мощностью 1 кВт, обмотки которого были соединены треугольником. Форма тока в фазах, проверенная с помощью осциллографа, подключенного через трансформатор тока, оказалась практически синусоидальной. При проверке было выяснено, что пусковой момент на валу двигателя недостаточен, а пусковой ток слишком велик. Тот факт, что выходное напряжение источника 300 В после его включения плавно нарастает в течение приблизительно 3 с, был использован для устранения указанных недостатков путем плавного пуска двигателя. Для этого необходимо изменять частоту трехфазного напряжения пропорционально текущему значению напряжения источника 300 В Чтобы реализовать эту идею, микроконтроллер PIC16F84 был заменен на PIC16F676, имеющий встроенный АЦП. Схема замены показана на рис. 2. В программу микроконтроллера PIC16F676 введен анализ текущего значения напряжения источника 300 В. При его изменении от 0 до 300 В частота формируемого трехфазного напряжения нарастает от 12 до 50 Гц и в дальнейшем остается равной достигнутому значению. Программы для микроконтроллеров PIC16F84 и РIС 16F676 можно скачать здесь www.cavr.ruЧастотный преобразователь: принцип работы и построение схемы. Инвертор асинхронного двигателя схема
Инвертор для асинхронного двигателя - RadioRadar
![]() Радиолюбителю
Радиолюбителю ![]() Электропитание
Электропитание

Преобразователи частоты для асинхронных двигателей

Устройство частотных преобразователей




Разница типов сигналов управления
Выбор мощности частотного преобразователя


Электромагнитная совместимость преобразователей частоты

 Watch this video on YouTube
Watch this video on YouTube A-QUALUX.RU - Запчасти и аксессуары для бытовой техники
1. Применение трёхфазных двигателей в стиральных машинах
Асинхронный трёхфазный электродвигатель был изобретён в 1889 году русским электротехником Доливо-Добровольским. Трёхфазные двигатели получили широкое применение в различной промышленной технике, в том числе и в промышленных стиральных машинах. С развитием современных технологий и электронных систем управления, подобные двигатели стали распространены и в бытовой технике. В бытовых стиральных машинах трёхфазные двигатели стали применяться примерно с 2005 года. Сегодня можно встретить такие двигатели только в некоторых моделях стиральных машин торговых марок: AEG, Electrolux, Ariston, Indesit, Whirpoll, Candy, Bosch, Siemens, Miele, Haier. Трёхфазные двигатели из-за низкого уровня шума, очень часто применяются в так называемых бесшумных стиральных машинах. 2. Общие сведения о трёхфазном токе и трёхфазном двигателе
Как известно из курса электротехники, в промышленности трёхфазный ток создаётся трёхфазным генератором, который имеет три обмотки сдвинутые относительно своей геометрической оси на угол 120°, поэтому на выходе каждой из обмоток генератора образуются переменные токи, фазы которых соответственно сдвинуты друг относительно друга также на 120°.График трёхфазного тока представлен на (Рис.2).Конструкция и принцип работы трёхфазного и однофазного асинхронных двигателей почти одинаковы. Разница лишь в обмотках статора. Трехфазные электродвигатели имеют на статоре трёхфазную обмотку, каждая секция обмоток которых сдвинута на 120°. Ротор (подвижная часть) трёхфазного двигателя имеет такую же конструкцию, что и однофазные асинхронные двигатели, т.е. состоит из короткозамкнутой обмотки в виде "беличьего колеса". Статор (неподвижная часть) состоит из сердечника в пазы которого уложены секции обмоток и подключены к контактной колодке двигателя.В отличие от однофазного асинхронного конденсаторного двигателя, трёхфазный двигатель подключённый к трёхфазной сети, не нуждается в пусковом конденсаторе, поскольку сдвиг фаз токов необходимый для образования пускового момента и вращающегося кругового магнитного поля обусловлен самой системой питания.Трёхфазные асинхронные двигатели могут работать так же от однофазной сети, но с потерей мощности примерно на 50% и естественно уже с применением пусковой схемы построенной на конденсаторах. 
Если не вдаваться в подробности основ теории электротехники, отметим главное - электродвигатели с обмотками, соединёнными звездой работают намного мягче, чем электродвигатели с соединением обмоток в треугольник, но нельзя не отметить, что при соединении обмоток звездой двигатель не способен выдать максимальную мощность. Если соединить обмотки треугольником, двигатель выдаст полную паспортную мощность (приблизительно в 1,5 раза выше, чем при соединении звездой), но значения пусковых токов будут высокими. 
Существуют две классические схемы подключения трёхфазных двигателей - это соединение обмоток статора по схеме "звезда" и "треугольник" (Рис.3) В стиральных машинах применяются трёхфазные асинхронные двигатели обмотки статора которых соединены по схеме "треугольник", т.е.конец первой обмотки соединен с началом второй, конец второй с началом третьей, а конец третьей с началом первой, образуя замкнутый контур. При таком соединении в замкнутый контур нет никакой опасности, так как благодаря сдвигу по фазе между электродвижущими силами на 120° их геометрическая сумма равна нулю и, следовательно тока в контуре быть не может. Все обмотки в трёхфазном двигателе имеют одинаковое электрическое сопротивление, что обеспечивает равномерную нагрузку на каждую фазу. 3. Система управления трёхфазным двигателем (инвертор)
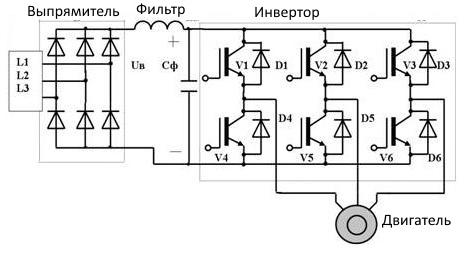
Выше, мы провели очень краткий обобщающий обзор по трёхфазному току и трёхфазному асинхронному двигателю. На самом деле, в электротехнике этот материал занимает очень большой раздел, с описанием всех физических процессов трёхфазной системы. Как же работает асинхронный трёхфазный двигатель в бытовой стиральной машине, которая подключена к однофазной сети с переменным напряжением 220 вольт? Для того, чтобы трёхфазный двигатель максимально эффективно работал в однофазной сети, применяют относительно сложный электронный преобразователь, который называют - инвертор. Структурная схема инвертора представлена ниже на (Рис.4).
 Фото 1. Единый блок управления стиральной машины Ariston
Фото 1. Единый блок управления стиральной машины Ariston
4.Диагностика трёхфазных асинхронных двигателей.
На (рис.4) приведена лишь структурная схема инверторного преобразователя, на самом деле принципиальная схема инвертора намного сложнее и содержит в себе микропроцессорную систему, операционные усилители, оптические развязки и т.п.
Сразу хочется отметить, что трёхфазные асинхронные двигатели стиральных машин довольно надёжные. В практике ремонта стиральных машин, известно крайне мало случаев выхода из строя подобных двигателей. 5. Преимущество и недостатки трёхфазных двигателей в стиральных машинах
К преимуществу трёхфазных двигателей перед коллекторными и однофазными асинхронными двигателями можно отнести низкий уровень шума и высокий КПД двигателя, а также простоту конструкции и большой эксплуатационный ресурс. Благодаря импульсно-частотной электронной схеме управления достигается широкий диапазон и точность регулирования частоты вращения ротора двигателя. При сравнительно небольших габаритах обладает большой мощностью.Частотный преобразователь: принцип работы и построение схемы
Что такое частотное преобразование
Выбор двигателя
Получение магнитного поля
Промышленные частотные привода
Плюсы использования частотных преобразователей
Векторное и частотное регулирование
Техническая реализация ПЧ
Принцип регулирования скорости
Система управления двигателем: трехфазный инвертор

Краткое описание и назначение устройства


Описание конструкции и электрической части печатной платы управления












Описание работы программы управления

Применение разработанной системы
Дополнительная информация по теме:
структурная схема и основные узлы
Выпрямительный каскад

Блок фильтрации напряжения

Блок инвертора
Микропроцессорная система управления
Защита преобразователя частоты

Алгоритм работы микроконтроллера

Инвертор для асинхронного двигателя CAVR.ru
Рассказать в: Предлагаемый инвертор состоит из микроконтроллера, узла защиты от превышения допустимого тока нагрузки и мощных коммутаторов напряжения на IGBT. управляемых специализированными микросхемами-драйверами. 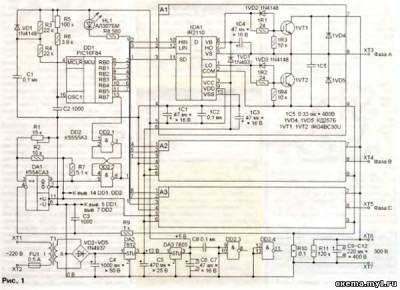
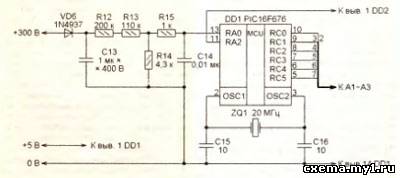 Рис. 2
Рис. 2

интернет-магазин светодиодного освещения
Пн - Вс с 10:30 до 20:00
Санкт-Петербург, просп. Энгельса, 138, корп. 1, тк ''Стройдвор''







Поделиться с друзьями: