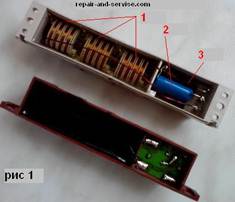
Шаговый двигатель — это бесколлекторный двигатель, ротор которого вращается не плавно, а шагами (дискретно). Полный оборот ротора состоит из нескольких шагов. Меняя форму сигнала, количество импульсов, их длительность и фазовый сдвиг, можно задавать скорость вращения, направление вращения и количество оборотов ротора двигателя. Шаговые двигатели состоят из ротора (подвижная часть) и статора (неподвижная часть). На статоре устанавливают электромагниты, а части ротора взаимодействующие с электромагнитами выполняются из магнитотвердого (двигатель с постоянными магнитами) или магнитомягкого (реактивный двигатель) материала. По типу ротора, шаговые двигатели делятся на: двигатели с постоянными магнитами, реактивные двигатели и гибридные двигатели. Если вручную покрутить ротор отключённого двигателя, то можно заметить, что он движется не плавно, а шагами. После того, как Вы покрутили ротор, замкните все провода двигателя и покрутите ротор повторно. Если ротор крутится также, значит у Вас реактивный двигатель. Если для вращения ротора требуется прикладывать больше усилий, значит у вас двигатель с постоянными магнитами или гибридный. Отличить двигатель с постоянными магнитами от гибридного можно подсчитав количество шагов в одном обороте. Для этого не обязательно считать все шаги, достаточно примерно понять, их меньше 50 или больше. Если меньше, значит у Вас двигатель с постоянными магнитами, а если больше, значит у Вас гибридный двигатель. По типу соединения электромагнитов, шаговые двигатели делятся на: униполярные и биполярные. На рисунке представлено упрощённое, схематическое, представление обмоток. На самом деле, каждая обмотка состоит из нескольких обмоток электромагнитов, соединённых последовательно или параллельно Если у Вашего двигателя 4 вывода, значит он биполярный. Если у Вашего двигателя 5 выводов, значит он униполярный. Но если у Вашего двигателя 6 и более выводов, то это не значит что некоторые из них являются центральными выводами катушек электромагнитов. Дело в том, что есть двигатели, некоторые выводы которых (обычно крайние), электрически замкнуты, так биполярный двигатель может иметь 6 выводов. Точно определить тип соединений, для двигателей с 6 и более выводами, можно только измеряя сопротивление между выводами. Ниже рассмотрены режимы работы, на примере биполярного двигателя с постоянным магнитом и полным шагом 90°. Полношаговый режим (одна фаза на полный шаг). Номинальные значения шагового двигателя указываются именно для этого режима. Полношаговый режим (две фазы на полный шаг). Этот режим позволяет увеличить крутящий момент почти в половину от номинального. Полушаговый режим. Этот режим позволяет увеличить количество шагов в полном обороте в два раза, при незначительном уменьшении крутящего момента. Микрошаговый режим. Этот режим является наиболее распространённым, он позволяет увеличить количество шагов в полном обороте в четыре раза, благодаря неравномерному распределению токов в обмотках. Снижение токов можно достичь снижением напряжения (как показано на картинке) или подавать полное напряжение через подключаемую внешнюю нагрузку. Если подавать уровни не «0» - «½» - «1» (как на картинке), а «0» - «¼» - «½» - «¾» - «1», то количество шагов в полном обороте увеличится не в 4 раза, а в 8 раз. Можно увеличить количество шагов в 16, 32, 64 раза и т.д., а если заменить дискретные уровни сигналов на синусоиды, то мотор будет вращаться плавно (без шагов). Режимы пониженного энергопотребления - доступны только для 8-выводных двигателей. Эти режимы отличаются от обычных тем, что используют только половину фазы (половину электромагнитов). Данные режимы используются редко, так как они значительно снижают крутящий момент двигателя. Электромоторы нельзя подключать к выводам Arduino напрямую, так как они потребляют значительные токи, шаговые двигатели не являются исключением, поэтому их подключают через драйверы. wiki.iarduino.ru Схема управления шаговым двигателем приведена на рисунке 1. Схема реализована на микросхемах простой логики. В ней используются три микросхемы К561ЛА7 и одна К561ТМ2. В качестве мощных ключей для коммутирования обмоток шагового двигателя применены составные транзисторы КТ829А, способные выдерживать ток до семи ампер. При нажатии на одну из кнопок двигатель начинает вращаться в ту или иную сторону. Кнопки использованы двойные, поэтому при их отпускании размыкается и цепь питания обмоток шагового двигателя, что исключает протекание сквозных токов при остановке двигателя. Но есть ситуации, когда для удержания ротора двигателя в нужном положении, необходимо, чтобы через одну из обмоток протекал удерживающий ток. В этом случае контроллер должен автоматически понизить напряжение питания обмоток двигателя до необходимой величины. В данной схеме этой опции нет, здесь напряжение питания снимается с обмоток двигателя полностью. На микросхеме DD1 собран генератор импульсов, изменение частоты этого генератора влечет за собой изменение частоты вращения шагового двигателя. Каждый импульс данного генератора поворачивает ротор на один шаг. На микросхемах DD2 и DD3 собраны логические элементы «исключающие или» и совместно с двумя триггерами DD4.1 и DD4.2, микросхемы К561ТМ2, образуют схему двухразрядного кольцевого счетчика для коммутации обмоток. Схема обеспечивает работу шагового двигателя в полушаговом режиме. Осциллограммы импульсных последователей полушагов показаны на скриншоте 1. Все обмотки двигателя зашунтированы демпфирующими диодами, устраняющими коммутационные выбросы напряжения. Микросхемы питаются через стабилизатор напряжения DA1 — КР142ЕН8Б. Максимальное входное напряжение этой равно35В. Так что и максимальное напряжение питания двигателя будет равно 35В. Почти все элементы схемы смонтированы на печатной плате. На плате нет микросхемного стабилизатора напряжения, демпфирующих диодов, кнопок и конденсаторов фильтра. При необходимости их можно разместить на плате, изменив немного ее топологию. Скачать схему и рисунок печатной платы можно здесь. Скачать “простая схема управления шаговым двигателем” Shema-upravl-shagov-dvigatel.rar – Загружено 1287 раз – 31 KB Просмотров:34 137 www.kondratev-v.ru Шаговый двигатель – электрический синхронный мотор, совершающий оборот некоторым количеством равноценных эквивалентных перемещений. От длины элементарного сегмента зависит точность, с которой ротор позиционируется нужным образом. В отдельности минимальное перемещение называется шагом. Шаговый двигатель в комплекте с драйвером выполняет преобразование числа входящих импульсов в заданное угловое перемещение вала. Устройство сопрягается с цифровой техникой, управляющий сигнал часто аналоговый. Входы обмоток посещает синусоида нужной фазы. Драйвер, получающий на контакты цифровой сигнал, декодирует волну, формирует нужные сигналы управления двигателем. Одна, две, три, четыре фазы. Определяется конструкцией, нуждами техники. Конструкция шагового двигателя Особенностью шагового двигателя назовем форму стального ротора. Снабжен полюсами, подчеркнутыми путем вынесения на кончик острого либо тупого зубца. Мертвый металл, притягиваемый катушками статора. Характеризуется некоторой намагниченностью остаточного рода, вызванной действием поля. Точное позиционирование полюсов статора обеспечивает шаговому двигателю уникальное свойство: точное позиционирование по углу поворота вала. Из правила встречаются исключения, рассмотренные ниже по тексту. Шаговые двигатели используются промышленностью, цифровой техникой – где требуется обеспечить точное позиционирование вала. Некоторые источники датируют изобретение серединой XIX века, первые сведения просочились в специализированные журналы в 20-х годах XX века. Речь о трехфазном реактивном шаговом двигателе. Исходное применение традиционно стало военным: на кораблях королевского флота Великобритании узлы направляли в нужную сторону торпеды. Позже технология перекочевала, посетив армию США. Первый открытый патент получен на прибор с ротором, статором на 32 зуба шотландским инженером Уолкером в 1919 году. Прибор рассчитан работать с трехфазным напряжением. Сегодня шаговые двигатели встречаются в жестких дисках персональных компьютеров, автоматизированных линиях сборки. Ключевыми достоинствами считают низкую стоимость, простоту позиционирования. Альтернатив не придумано. Устройства применяются приблизительно с 70-х годов XX века, формируют четыре основные группы: Полюсы различной намотки, к примеру, унифилярной, бифилярной (см. Катушка индуктивности). В первом случае ротор совершает обороты однонаправленно, если не предусмотреть дополнительную коммутацию фаз. Бифилярный двигатель отрабатывает реверс простой подачей напряжения на другие пары контактов. На каждом полюсе нить проволоки намотана, образуя две катушки. Конструкция такова, что знаки полей противоположные. Обеспечивает простую организацию реверса. Схожие схемы видим на примере двигателя привода барабана стиральной машины. Мировой практикой принята стандартизированная маркировка указанных разновидностей устройств: Каждая обмотка способна образовывать несколько полюсов. Для включения реверса бифилярных шаговых двигателей коммутируется другая пара контактов. И если для формирования обратного вращения унифилярных разновидностей нужен формирующий контроллер, здесь допустимо использовать рядовой контактор. Изделия функционируют в нескольких режимах: Электрический синхронный мотор Род двигателей возможно встретить в помпе стиральной машины. К примеру, блок, удаляющий воду бака после стирки, между отдельными этапами цикла. Скорость вращения вала невелика, ротор в составе содержит постоянный магнит, шаг большой. Допустим, 45 градусов. На обмотки статора поочередно подается напряжение, создавая вращающееся магнитное поле. Постоянный магнит вала следует изменениям вектора напряженности. Достоинствами шаговых двигателей назовем простоту, низкую стоимость. Постоянные магниты часто применяются принтерами. Отличие от других шаговых двигателей: ротор лишен зубцов, полюсов мало. Бывает два, катушек статора — 4, каждым перемещением вал совершает поворот 90 градусов. Требуется 4 фазы, сдвинутые друг относительно друга на 90 градусов. Драйвер просто реализовать при помощи конденсаторов. Благодаря низкой скорости оборотов двигатель развивает высокий крутящий момент (загружая бумагу из лотка принтера). Двигатель с постоянным магнитом Гибридные синхронные двигатели используются промышленностью по причине развития высокого крутящего момента, хорошо держат статическую нагрузку. Вал по-прежнему представлен постоянным магнитом, снабжается зубцами, на статоре множество полюсов. Тип двигателей обеспечивает высокие скорости вращения. Каждый шаг в стандартном исполнении равен 1,8 угловых градусов (200 шагов/оборот). Выпускают специализированные исполнения: Главным отличием вентильных двигателей считают отсутствие тяжелых постоянных магнитов. Благодаря чему жесткой фиксации положения не происходит при наличии высокой точности. Двигатели идеальны для просмотра слайдов кинопленки. Относительно плавное, точное движение идеально подходит случаю. Ротор облегченный, стальной, имеет ярко выраженные, сравнительно немногочисленные зубцы. Шаг средний, например, для трех фаз, 12 полюсов выйдет 15 градусов. Расстояние меж полюсами составляет 30 градусов. Промежуточные положения вал занимает в случаях, когда активируются одновременно две соседние фазы. Чередование соответствует обычной промышленной сети (к примеру, 400 вольт). Главной особенностью вентильных двигателей является сравнительно малое количество тупых зубцов. Высокой точности позиционирования ожидать не приходится. Для реализации продвинутых алгоритмов применяются сложные драйверы. Шаговые двигатели Лавета временами применяются электрическими часами. Сконструированы работать с сигналом одной фазы. Благодаря возможности миниатюризации двигатели Лавета послужат исполнительной частью наручных часов. Название устройства получили именем изобретателя – инженера Мариуса Лавета. Инженер Мариус Лавет позавидует В 1936 году выпускник Высшей школы электрики сконструировал двигатель, принесший всемирную известность. Статор выглядит, как у электрического мотора с расщепленными полюсами. Одна катушка. Полюсы образованы единичными витками сравнительно толстой медной проволоки, расположенными на магнитопроводе, создавая нужную фазу ЭДС. Индуцированные токи обеспечивают нужный крутящий момент. Задержка распространения магнитного поля по сердечнику используется сдвигать фазу на 90 градусов, имитируя двухфазное напряжение. Ротор представлен постоянным магнитом. Конструкции охотно используются бытовой техникой (блендерами, миксерами). Отличие двигателей Лавета в том, что благодаря зубцам вал фиксируется с некоторым шагом. Становится возможным характерное движение секундной стрелки. Как большинство шаговых двигателей, разновидность не предназначена работать на реверс. Отдельные параметры шаговых двигателей критичны при выборе соответствующего контроллера, формирующего управляющие напряжения: В глобальном смысле выделяют три группы драйверов управления шаговыми двигателями: vashtehnik.ru Это довольно простая схема контроллера шагового двигателя, которая позволит вам осуществить управление шаговым двигателем через параллельный порт вашего компьютера. Шаговый двигатель можно применить в конструировании роботов, в изготовлении печатных плат, использовать в качестве микродрели, автоматической кормушки для аквариумных рыбок и т.д. Если вы никогда не работали с шаговыми двигателями, то эта статья для вас. Шаговые двигатели отличаются от регулируемых двигателей постоянного тока. Вместо того чтобы вращаться как двигатели постоянного тока, шаговый двигатель совершает дискретное вращение под воздействием серии импульсов. В нашем примере двигателю необходимо 48 импульсов чтобы совершить полный оборот в 360 градусов. Другое преимущество шаговых двигателей - то, что их скорость вращения может быть достигнута почти мгновенно при изменении направления вращения на противоположное. Шаговый двигатель состоит из ротора - постоянного магнита, который вращается внутри, и статор - четыре катушки (север, восток, юг, запад), которые являются частью корпуса и не перемещаются. Ротор совершает вращение посредством последовательных импульсов напряжение постоянного тока подаваемого к одной или двум катушкам одновременно. Чтобы управлять шаговым двигателем необходим контроллер. Контроллер - схема, которая подает напряжение к любой из четырех катушек статора. Устройство может быть построено с использованием интегральной микросхемы типа ULN2003 (отечественный аналог К1109КТ22) состоящая из набора мощных составных ключей с защитными диодами на выходе. Наличие защитных диодов позволяет подключать индуктивные нагрузки без дополнительной защиты от выбросов обратного напряжения. Однополярный двигатель должен иметь пять или шесть контактов в зависимости от модели. Если двигатель имеет шесть контактов то необходимо соединить выводы 1 и 2 (красный) вместе и подключить их к плюсу 12-24V напряжения питание. Оставшиеся выводы a1 (желтый), b1 (черный), a2 (оранжевый), b2 (коричневый) подключить к контроллеру согласно схеме. Способы управления. Есть несколько способов, которые вы можете использовать, чтобы управлять шаговым двигателем. 1. Одиночные импульсы - самый простой способ. Одновременно подключается только одна катушка. Необходимо 48 пульсов чтобы ротор совершил один полный оборот. Каждый пульс перемещает ротор на 7,5 градусов. 2. Двойной импульс - одновременное подключение двух соседних катушек. В этом случае также необходимо 48 пульсов чтобы ротор совершил один полный оборот. Каждый пульс перемещает ротор на 7,5 градусов. 3. Комбинированные импульсы - чередование первого и второго способа. Двигатель нуждается в 96 пульсах, чтобы совершить один оборот. Каждый пульс перемещает ротор приблизительно на 3,75 градуса. Программное обеспечение контроллера шагового двигателя. Для управления работой шагового двигателя используем компьютер и программу. При использовании компьютера вы будете в состоянии сделать намного больше с вашим шаговым двигателем и наиболее важно - визуализировать, как ток течет через катушки. В программе понятный графический интерфейс, который позволяет точно управлять скоростью двигателя и направлением вращения в реальном времени, а также позволяет выбирать способы управления. Программа работает с версией Windows (98/ME/2000/XP). www.joyta.ru Шаговые электродвигатели легко решают проблему точного позиционирования, не затратив больших средств. Моторы чаще применяются в роботах, станках с программным управлением. Рассмотрим устройство и действие двигателей. Шаговые двигатели являются двигателями переводящими электричество в механическое движение. Главным отличием его от других электромоторов в методе действия. Благодаря этому методу вал вращается. Моторы с шагом созданы для прерывистого вращения, этим они отличаются от других. Их вращение состоит из шагов, от этого получилось название. Шаг является частью оборота вала мотора. Размер шага зависит от механической части двигателя и от метода управления. Шаговые двигатели подключаются к различным типам питания. В отличие от своих собратьев, шаговый мотор имеет управление импульсами, преобразующимися в градусы, а затем во вращение. Например, 2,20 шаговый мотор вращает вал на 2,20 при каждом поданном импульсе. Эта характеристика дает повод называть их цифровыми. Обмотки в количестве 4-х штук стоят по кругу равномерно между собой на статоре. В зависимости от того, как подключены эти обмотки будет определяться тип шагового двигателя. В нашем случае обмотки разделены, мотор с шагом, углом поворота в 90 градусов. Обмотки подключены по кругу. Порядок подключения направление вращения двигателя с шагом. На рисунке видно, что вал вращается на 90 градусов в то время, как ток поступит в катушку, через 1 секунду.Стандартными составляющими шаговых двигателей являются ротор и статор. Ротор включает в себя сердечники, изготовленные из магнитов. Схематически дано изображение. При разной подаче тока на катушки вал двигателя вращается по-разному. Метод практически нами рассмотрен, волновое действие на катушку. Ток идет через одну катушку. Такой метод редко применяется, характерен пониженным потреблением энергии, дает возможность получения меньше 50% момента вращения двигателя. Большую нагрузку при таком управлении шаговые электродвигатели не выдержат. На один оборот вала приходится четыре шага. Широко применяемый метод — полношаговый. По этому способу напряжение питания на катушки подается попарно. От того, как подключены обмотки, двигателю необходим двойной ток. Электродвигатель при такой схеме выдаст 100% момента вращения по номиналу. Полный оборот двигателя соответствует четырем шагам, число шагов по номинальному значению. Это оригинальный метод получения двойной точности позиционирования, не изменяя конструкцию двигателя. Чтобы работать по этому способу, подключают одновременно все имеющиеся пары. Ротор поворачивается на 0,5 шага. Такой способ имеет место при применении двух или одной катушки. По этому способу один и тот же мотор может выдать шагов в 2 раза больше на один оборот. Это значит, что система позиционирования работает с двойной точностью. Наш мотор выдает восемь шагов на один оборот. Смысл микрошага заключается в подаче на катушки двигателя напряжения питания сигнала определенной формы, похожей на синус, а не импульсов. При таком методе изменения положения дает возможность получения плавного перемещения. Благодаря микрошаговому режиму шаговые электродвигатели широко применяются в позиционировании, в программно управляемых станках. Рывки деталей, работающих с двигателем, толчки самого механизма понижаются. В микрошаговом режиме двигатель вращается плавно, как моторы постоянного тока. Конфигурация графика тока, проходящего по обмотке, сходна с синусоидой. В эксплуатации применяются цифровые сигналы. Их примеры показаны на рисунках. Способ микрошага — подключение питания двигателя, не управления катушками. Отсюда следует, что микрошаг применяется при волновом типе. В микрошаговом типе шаги не увеличиваются, хотя визуально это представляется. Для увеличения точности механизма применяют шестерни с трапецеидальными зубьями, чтобы обеспечить плавный ход. Ротор оборудован постоянным дисковым магнитом с несколькими полюсами. Действует по такому же принципу, как микрошаговый мотор. Катушки статора отталкивают и притягивают магнит, расположенный на роторе, образуя момент вращения. Размер шага с постоянным магнитом находится в интервале от 45 до 90 градусов. Ротор не имеет постоянных магнитов. Вместо них сердечник ротора производится из металла, похожего на диск с зубьями, или на шестерню. На статоре расположены обмотки в количестве более 4-х штук. Катушки подключаются в парах друг к другу. Крутящий момент уменьшается, так как постоянные магниты отсутствуют. Однако, имеется положительная сторона — у шаговых моторов отсутствует момент стопорения. Стопорящий момент вращения создан постоянными магнитами, притягивающимися к корпусу статора при отключенном питании в катушках. Можно просто определить, какой момент, если попробовать повернуть отсоединенный мотор. Сразу будут понятны ощутимые щелчки в двигателе при каждом шаге. Эти ощущения и будут являться моментом фиксации. Момент притягивает к себе магниты корпуса. На рисунке изображено действие мотора. Шаг равен интервалу от 5 до 15 градусов. Шаговые электродвигатели называются «гибридными», потому что включают в себя разные типы характеристик. Они имеют хорошие моменты, малый размер шага, находящийся в интервале от 0,9 до 5 градусов. При этом он обеспечивает высокую точность. Механическая конструкция вращается со значительными скоростями. Такие виды моторов применяются в станках с программным управлением, в роботах. Недостатком является высокая цена. Обыкновенный двигатель вместе с восьмью катушками. Из-за невозможности изготовления магнита, нашли оригинальное решение. Взяли два диска с зубьями 50 штук, постоянный магнит. Приварили диски к полюсам. Получилось, что два диска имеют соответственно каждый полюс. Оригинальность конструкции в том, что диски размещены так, что, смотря на них сверху, они похожи на один диск со 100 зубьями. Вершина зуба на одном диске совпадает со впадиной. На рисунке изображено действие гибридного мотора 75 шагов на один оборот. Шесть обмоток сделаны парами, которые имеют катушку на противоположных краях. Первая пара – это пара вверху и внизу обмотки, тогда 2-я пара смещена на угол 60+5 градусов от первой, а 3-я смещена на 65 градусов от второй. Разница углов позволяет вращаться валу двигателя. Управляющие режимы применяются, как волновые для экономии электроэнергии. Когда катушка задействована, имеется три положительных полюса в 5 градусов сзади, они притягиваются в сторону вращения, и три отрицательных полюса в 5 градусов впереди, толкают ротор в сторону вращения вала. Рабочая обмотка всегда расположена между отрицательным и положительным полюсами. Шаговые моторы принадлежат к моторам с несколькими фазами. Чем больше фаз, тем работа двигателя мягче, но и выше стоимость. Момент вращения не зависит от числа фаз. Большое применение получили двигатели с 2-мя фазами. Двигатели подключают тремя типами схем для 2-фазных шаговых моторов. Катушки соединены друг с другом, применено разное количество проводов для соединения двигателя с контроллером. Это самая простая конструкция, применяется четыре провода для соединения мотора с контроллером. Катушки подключены параллельно или последовательно. Двигатель имеет 4 контакта. Два желтых экрана подключают вертикальную катушку, два розовых – горизонтальную. Проблема в изменении полярности, можно изменить направление тока, драйвер станет сложнее. Применяя общий провод, изменяют полюса магнитов. Если соединить общий провод с землей, один и другой вывод катушки к питанию, то полюса изменятся. Схема соединения двигателя биполярного типа простая для понимания, она обычно состоит из 2-х транзисторов на одну фазу. Недостаток – применение половины катушек, как при волновой управляемости электромотором. Момент вращения получается равным половине возможного значения. Униполярные электромоторы необходимо изготавливать по двойным размерам, для обеспечения сопоставимого момента. 1-полярный электромотор имеет возможность применяться в качестве биполярного мотора. Для этой цели необходимо провод отключить. Это мотор с гибким подключением, обмотки оснащены выводами с обеих сторон. Можно подключать двигатель по любому методу: Моторы Лавета используются в электрических часах. Их конструкция сделана для эксплуатации с одним фазовым сигналом. Моторы Лавета обладают возможностью делать их конструкцию миниатюрной, применяются для исполнительной части часов ручного ношения. Этот тип моторов изобрел инженер Мариус Лавет. По его имени назвали тип шаговых двигателей. Лавет – выпускник школы электрики изобрел двигатель, который дал ему известность во всем мире. Вид статора похож на статор электромотора с расщепленными полюсами. Имеется одна обмотка, полюса созданы витками с одним проводом из медной жилы толстого сечения, расположены на магнитном проводе, образуют необходимую фазу. Токи индукции образуют необходимый момент вращения. Магнитное поле распространяется с задержкой, применяется для сдвига фаз, на прямой угол 90 градусов, чтобы имитировать напряжение из двух фаз. Конструкция ротора создана в виде постоянного магнита. Конструкции такого типа имеют широкую сферу применения в технике для быта (миксерах, блендерах). Моторы Лавета отличаются тем, что из-за зубцов вал стопорится с определенным шагом. Результатом этого возможно движение стрелки секунд. Разновидность двигателя Лавета не предназначена для реверсивной работы, как и большинство шаговых моторов. electrosam.ru Схема драйвера униполярного шагового двигателя, описанная в данной статье, реализует следующие задачи:• управление 4-фазовым униполярным шаговым двигателем.• обеспечивает плавную регулировку скорости вращения и изменение направления вращения.• выполняет функцию остановки двигателя. Ниже представлена принципиальная схема драйвера шагового двигателя. Драйвер построен с использованием трех микросхем 4000 серии и четырех силовых MOSFET транзисторов. Схема тактируется генератором прямоугольных импульсов, построенного на логических элементах 2И-НЕ с триггером Шмитта на выходе. Рабочая частота генератора определяется общим сопротивлением PR1 + R2 и емкостью конденсатора С1, и может быть изменена в широком диапазоне с помощью потенциометра PR1. Фрагмент схемы на элементах EXOR и J-K триггере создает счетчик по модулю 4, с тактами высокого уровня. Переключатель SB1 (JP1) предназначен для изменения направления работы счетчика, а, следовательно, для изменения направления вращения шагового двигателя. С помощью переключателя SB2 (JP2) можно запускать и останавливать двигатель. Управление катушками 4-фазного шагового двигателя осуществляется с помощью четырех MOSFET транзисторов (VT1...VT4). Использование в данной схеме транзисторов высокой мощности типа BUZ11 - это решение, гарантирующее надлежащую работу двигателя высокой мощности. Ниже показаны формы сигналов на разъеме Х2, к которому подключаются обмотки шагового двигателя. Драйвер собран на печатной плате, рисунок которой приведен ниже. Монтаж следует начать с установки резисторов, панельки под микросхемы и закончить разъемами и силовыми транзисторами. Разъемы JP1 и JP2 имеют ту же функцию, что и нажатие кнопки SB1 и SB2, так что вы можете подключить к ним кнопки и вынести их за пределы платы.Печатная плата разработана таким образом, что вы можете установить транзисторы на общий радиатор, предварительно изолировав их слюдяными или силиконовыми прокладками. После сборки необходимо тщательно проверить плату на предмет короткого замыкания дорожек. Драйвер, собранный из исправных деталей не требует настройки и начинает работать сразу. Следует, упомянуть о способе подключения питания и обмоток двигателя к плате драйвера. В случае питания схемы управления и двигателя тем же напряжением, которое находится в диапазоне от 5...15 В, и ток потребления не превышает 1 А, то необходимо установить перемычку JP3 и питание подать к разъему VDD. Если параметры питания шагового двигателя не находится в пределах напряжения питания схемы драйвера, то необходимо снять перемычку JP3, и к разъему VDD подвести напряжение питания от 5...15 В, а к разъему X2 подать питание в соответствии с параметрами шагового двигателя. www.joyta.ru Здравствуйте Юрий Валерьевич! Опишу изменения в схеме > Что меня подвигло к изменению схемы? В исходной схеме управление двигателем производится двумя кнопками каждая, из которых содержит по две группы контактов. Одна группа подаёт высокий логический уровень на вход микросхем, другая подаёт питание на двигатель. В виду того, что некоторые двигатели потребляют значительный ток, группа контактов, управляющая двигателем должна быть достаточно мощной, а, следовательно, и габаритной. Это конечно не удобно и не желательно в виду снижения надёжности устройства по причине использования механических контактов в сильноточных цепях. Я предлагаю управлять питанием двигателя при помощи мощного полевого транзистора, который в свою очередь управляется теми же кнопками. При замыкании кнопок SB-1 или SB-2 высокий логический уровень через логический элемент ИЛИ образованный диодами VD-6 и VD-7 поступает на затвор полевого транзистора VT-5,открывая его, и тем самым замыкая цепь питания двигателя. Это даёт возможность разделить цепи питания и управления, и использовать для управления миниатюрные слаботочные кнопки например тактовые кнопки и кроме того даёт возможность производить управление от внешнего устройства (например компьютера) подачей соответствующих логических уровней. Естественно через дополнительное устройство согласования. Можно ещё реализовать пошаговое управление, но не буду усложнять. Ведь это ПРОСТОЕ устройство. Диоды можно применить любые, кремниевые, какие влезут. Полевой транзистор следует выбирать исходя из напряжения питания и потребляемого тока применяемого двигателя. Полевых транзисторов сейчас продаётся много различной мощности с напряжениями сток-исток до сотен вольт и с токами стока до десятков ампер. Если применяется низковольтный двигатель, то желательно и транзистор выбирать низковольтный, так как у них меньшее сопротивление сток-исток, что предполагает меньшее падение напряжения и меньший нагрев и потери мощности. По этой же причине желательно и в качестве VT1-VT5, так же использовать полевики с N-каналом. В этом случае сопротивление резисторов в цепи базы можно уменьшить, это не приведёт к перегрузке логических элементов. В исходной схеме не указан тип применённого стабилизатора, но я думаю, что 12вольт будет как раз. Следует учитывать, что мощные полевики, как правило, начинают интенсивно открываться при напряжении на затворе около 4 вольт и насыщаются при напряжении около 10 вольт. Вот вроде и всё. Изменённая схема и изменённая печатка прилагаются. Скачать “Управление шаговым двигателем” Uprav_shag_dvig.rar – Загружено 1 раз – 34 KB Но можно обойтись и без диодов, если для управления транзистором использовать сигнал разрешения работы генератора. Это вывод 2 микросхемы DD1.1. В качестве полевого транзистора лучше использовать транзисторы, в маркировке которых присутствует буква «L». Например, IR2505L. Такие транзисторы как раз предназначены для работы с логическими микросхемами и совместимы даже с пятивольтовой логикой. Просмотров:23 688 www.kondratev-v.ruпростая схема управления шаговым двигателем. Двигатель шаговый схема
Шаговые двигатели (подробный разбор 4 типов)
Общие сведения:
Виды шаговых двигателей по типу ротора:
Какой тип шагового двигателя у меня?
Виды шаговых двигателей по типу соединения электромагнитов статора:
Какой тип шагового двигателя у меня?
Режимы работы шаговых двигателей:
Для работы шагового двигателя (вне зависимости от его вида) можно выбрать один из трех режимов работы:
Пример работы шаговых двигателей с разными видами роторов:
Подключение шаговых двигателей к Arduino:
Драйверы делятся на две категории:
Простая схема управления шаговым двигателем
Опубликовал admin | Дата 10 января, 2014 

Обсудить эту статью на - форуме "Радиоэлектроника, вопросы и ответы".
принцип действия, виды, режимы работы
Принцип действия шаговых двигателей, разновидности

Режимы работы шаговых двигателей

Шаговые двигатели на постоянном магните

Гибридные синхронные двигатели
Вентильные шаговые двигатели
Шаговые двигатели Лавета

Параметры шаговых двигателей
Разновидности драйверов шаговых двигателей
Управление шаговым двигателем. Инструкция | joyta.ru
Как работает шаговый двигатель?
Устройство Шагового двигателя.

Подключения шагового двигателя.







 Файлы к данной схеме (1,5 Mb, скачано: 7 585)
Файлы к данной схеме (1,5 Mb, скачано: 7 585)Шаговые электродвигатели. Виды и работа. Особенности
Устройство
Метод действия
Режимы управления
Волновое управление
Управление полным шагом
Режим полушага
Микрошаговый режим
Типы моторов
Мотор с постоянным магнитом
Шаговые электродвигатели с сопротивлением переменной величины
Шаговый мотор гибридного типа
Схема подключения обмоток
Биполярный двигатель
Униполярный двигатель
Униполярные шаговые электродвигатели имеют несколько вариантов подключения.
Общий провод соединен внутриШаговый мотор с 8-ю выводами
Подключение 4 обмотокШаговые электродвигатели Лавета
Схема простого драйвера для униполярного шагового двигателя


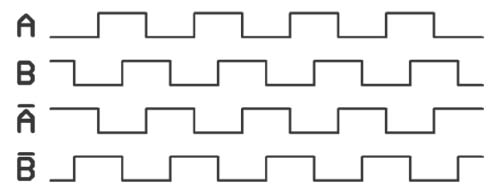


 Рисунок печатной платы (8,5 Kb, скачано: 1 034)
Рисунок печатной платы (8,5 Kb, скачано: 1 034)Управление шаговым двигателем | Все своими руками
Опубликовал admin | Дата 20 января, 2014 

Обсудить эту статью на - форуме "Радиоэлектроника, вопросы и ответы".

интернет-магазин светодиодного освещения
Пн - Вс с 10:30 до 20:00
Санкт-Петербург, просп. Энгельса, 138, корп. 1, тк ''Стройдвор''





Поделиться с друзьями: