Двигатели постоянного тока используется в промышленности лишь в том случае, когда требуется регулировать скорость вращения очень точно. В данной публикации подробно рассмотрим методы подключения, а также принцип работы двигателя постоянного тока. Стоит отметить, что данная статья является ознакомительной. Она предоставляет лишь поверхностную информацию в отношении подключения электрического двигателя. Ниже будут представлены два элемента, без которых электрический двигатель существовать не может: Статор – неподвижная часть электрического двигателя. В нем располагаются пазы, куда и укладывается электрическая обмотка. В зависимости от количества витков изменяются технические характеристики двигателя. Ротор – это подвижная часть электрического двигателя. Стоит отметить огромную важность воздушного зазора между статором и ротором. И речь идет не только о том, чтобы ротор вращался свободно. Именно в воздушном зазоре возникает магнитный поток, который начинает вращать ротор. Существует несколько различных систем подключения: с независимым возбуждением, с последовательным возбуждением, с параллельным возбуждением, смешанная. В зависимости от этих типов подключения будут зависеть пусковые характеристики двигателя постоянного тока. В завершение следует несколько слов сказать и о сфере применения двигателей постоянного тока. Дело в том, что ДТП является наиболее популярным электрическим двигателем. Он широко используется не только в промышленности, но и в быту. Вряд ли стоит объяснять, что любой двигатель может быть превращен в генератор. Генераторы постоянного тока используется в автомобилях. Кроме того, практически все малогабаритные двигатели, которые используются в быту от аккумулятора, представляют собой не что иное, как двигатель постоянного тока. Как уже было сказано выше, широкое распространение двигатель постоянного тока получил за счет того, что имеется простая возможность регулировки скорости его вращения. Осуществляется это при помощи изменения сопротивления якоря. Смотрите также: Канал «Советы электрика» расскажет о принципах функционирования двигателя постоянного тока: По материалам: http://www.servomh.ru/elektrodvigateli/postoyannogo-toka euroelectrica.ru Обмотка возбуждения подключается к независимому источнику. Характеристики двигателя получаются такие же, как у двигателя с постоянными магнитами. Скорость вращения регулируется сопротивлением в цепи якоря. Регулируют ее и реостатом (регулировочным сопротивлением) в цепи обмотки возбуждения, но при чрезмерном уменьшении его величины или при обрыве ток якоря возрастает до опасных значений. Двигатели с независимым возбуждением нельзя запускать на холостом ходу или с малой нагрузкой на валу. Скорость вращения резко увеличится, и двигатель будет поврежден. Схема независимого возбуждения Остальные схемы называют схемами с самовозбуждением. Обмотки ротора и возбуждения подключаются параллельно к одному источнику питания. При таком включении ток через обмотку возбуждения в несколько раз меньше, чем через ротор. Характеристики электродвигателей получаются жесткими, позволяющие использовать их для привода станков, вентиляторов. Регулировка скорости вращения обеспечивается включением реостатов в цепь ротора или последовательно с обмоткой возбуждения. Схема параллельного возбуждения Обмотка возбуждения включается последовательно с якорной, по ним течет один и тот же ток. Скорость такого двигателя зависит от его нагрузки, его нельзя включать на холостом ходу. Но он обладает хорошими пусковыми характеристиками, поэтому схема с последовательным возбуждением применяется на электрифицированном транспорте. Схема последовательного возбуждения При этой схеме используются две обмотки возбуждения, расположенные попарно на каждом из полюсов электродвигателя. Их можно подключить так, чтобы потоки их либо складывались, либо вычитались. В результате двигатель может иметь характеристики как у схемы последовательного или параллельного возбуждения. Схема смешанного возбуждения Для изменения направления вращения изменяют полярность одной из обмоток возбуждения. Для управления пуском электродвигателя и скоростью его вращения применяют ступенчатое переключение сопротивлений Двигатель постоянного тока независимого возбуждения (ДПТ НВ) В этом двигателе (рисунок 1) обмотка возбуждения подключена к отдельному источнику питания. В цепь обмотки возбуждения включен регулировочный реостат rрег, а в цепь якоря — добавочный (пусковой) реостат Rп. Характерная особенность ДПТ НВ — его ток возбуждения Iв не зависит от тока якоря Iя так как питание обмотки возбуждения независимое. Схема двигателя постоянного тока независимого возбуждения (ДПТ НВ) Рисунок 1 Уравнение механической характеристики двигателя постоянного тока независимого возбуждения имеет вид где: n0 — частота вращения вала двигателя при холостом ходе. Δn — изменение частоты вращения двигателя под действием механической нагрузки. Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой (график 1). Механические характеристики двигателя, полученные при номинальных значениях напряжения на обмотках якоря и возбуждения и при отсутствии добавочных сопротивлений в цепи якоря, называют естественными (график 7). Если же хотя бы один из перечисленных параметров двигателя изменен (напряжение на обмотках якоря или возбуждения отличаются от номинальных значений, или же изменено сопротивление в цепи якоря введением Rдоб), то механические характеристики называют искусственными. Искусственные механические характеристики, полученные введением в цепь якоря добавочного сопротивления Rдоб, называют также реостатными (графики 7, 2 и 3). При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого возбуждения: где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин. Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя. откуда: На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения. studfiles.net Электрические двигатели, приводящиеся в движение путем воздействия постоянного тока, применяются значительно реже, по сравнению с двигателями, работающими от переменного тока. В бытовых условиях электродвигатели постоянного тока используются в детских игрушках, с питанием от обычных батареек с постоянным током. На производстве электродвигатели постоянного тока приводят в действие различные агрегаты и оборудование. Питание для них подводится от мощных батарей аккумуляторов. Электродвигатели постоянного тока по конструкции подобны синхронным двигателям переменного тока, с разницей в типе тока. В простых демонстрационных моделях двигателя применяли один магнит и рамку с проходящим по ней током. Такое устройство рассматривалось в качестве простого примера. Современные двигатели являются совершенными сложными устройствами, способными развивать большую мощность. Главной обмоткой двигателя служит якорь, на который подается питание через коллектор и щеточный механизм. Он совершает вращательное движение в магнитном поле, образованном полюсами статора (корпуса двигателя). Якорь изготавливается из нескольких обмоток, уложенных в его пазах, и закрепленных там специальным эпоксидным составом. Статор может состоять из обмоток возбуждения или из постоянных магнитов. В маломощных двигателях используют постоянные магниты, а в двигателях с повышенной мощностью статор снабжен обмотками возбуждения. Статор с торцов закрыт крышками со встроенными в них подшипниками, служащими для вращения вала якоря. На одном конце этого вала закреплен охлаждающий вентилятор, который создает напор воздуха и прогоняет его по внутренней части двигателя во время работы. Принцип действия такого двигателя основывается на законе Ампера. При размещении проволочной рамки в магнитном поле, она будет вращаться. Проходящий по ней ток создает вокруг себя магнитное поле, взаимодействующее с внешним магнитным полем, что приводит к вращению рамки. В современной конструкции мотора роль рамки играет якорь с обмотками. На них подается ток, в результате вокруг якоря создается магнитное поле, которое приводит его во вращательное движение. Выводы обмоток якоря объединены в один узел, называемый коллектором, выполненным в виде кольца из ламелей, закрепленных на валу якоря. При вращении вала щетки по очереди подают питание на обмотки якоря через ламели коллектора. В результате вал двигателя вращается с равномерной скоростью. Чем больше обмоток имеет якорь, тем равномернее будет работать двигатель. Щеточный узел является наиболее уязвимым механизмом в конструкции двигателя. Во время работы медно-графитовые щетки притираются к коллектору, повторяя его форму, и с постоянным усилием прижимаются к нему. В процессе эксплуатации щетки изнашиваются, а токопроводящая пыль, являющаяся продуктом этого износа, оседает на деталях двигателя. Эту пыль необходимо периодически удалять. Обычно удаление пыли выполняют воздухом под большим давлением. Щетки требуют периодического их перемещения в пазах и продувки воздухом, так как от накопившейся пыли они могут застрять в направляющих пазах. Это приведет к зависанию щеток над коллектором и нарушению работы двигателя. Щетки периодически требуют замены из-за их износа. В месте контакта коллектора со щетками также происходит износ коллектора. Поэтому при износе якорь снимают и на токарном станке протачивают коллектор. После проточки коллектора изоляция, находящаяся между ламелями коллектора стачивается на небольшую глубину, чтобы она не разрушала щетки, так как ее прочность значительно превышает прочность щеток. При таком характере возбуждения обмотка подключается к внешнему источнику питания. При этом параметры двигателя аналогичны двигателю на постоянных магнитах. Обороты вращения настраиваются сопротивлением обмоток якоря. Скорость регулируют специальным регулировочным реостатом, включенным в цепь обмоток возбуждения. При значительном снижении сопротивления или при обрыве цепи ток якоря повышается до опасных величин. Электродвигатели с независимым возбуждением запрещается запускать без нагрузки или с небольшой нагрузкой, так как его скорость резко возрастет, и двигатель выйдет из строя. Обмотки возбуждения и ротора соединяются параллельно с одним источником тока. При такой схеме ток обмотки возбуждения значительно ниже тока ротора. Параметры двигателей становятся слишком жесткими, их можно применять для привода вентиляторов и станков. Регулировка оборотов двигателя обеспечивается реостатом в последовательной цепи с обмотками возбуждения или в цепи ротора. В этом случае возбуждающая обмотка подключается последовательно с якорем, в результате чего по этим обмоткам проходит одинаковый ток. Обороты вращения такого мотора зависят от его нагрузки. Двигатель нельзя запускать на холостом ходу без нагрузки. Однако такой двигатель обладает приличными пусковыми параметрами, поэтому подобная схема используется в работе тяжелого электротранспорта. Такая схема предусматривает применение двух обмоток возбуждения, находящихся парами на каждом полюсе двигателя. Эти обмотки можно соединять двумя способами: с суммированием потоков, либо с их вычитанием. В итоге электродвигатель может обладать такими же характеристиками, как у двигателей с параллельным или последовательным возбуждением. Чтобы заставить двигатель вращаться в другую сторону, на одной из обмоток изменяют полярность. Для управления скоростью вращения мотора и его запуском используют ступенчатое переключение разных резисторов. Электродвигатели постоянного тока отличаются экологичностью и надежностью. Их главным отличием от двигателей переменного тока является возможность регулировки оборотов вращения в большом диапазоне. Такие электродвигатели можно также применять в качестве генератора. Изменив направление тока в обмотке возбуждения или в якоре, можно изменять направление вращения двигателя. Регулировка оборотов вала двигателя осуществляется с помощью переменного резистора. В двигателях с последовательной схемой возбуждения это сопротивление расположено в цепи якоря и позволяет уменьшить скорость вращения в 2-3 раза. Этот вариант подходит для механизмов с длительным временем простоя, так как при работе реостат сильно нагревается. Повышение оборотов создается путем включения в цепь возбуждающей обмотки реостата. Для моторов с параллельной схемой возбуждения в цепи якоря также применяются реостаты для уменьшения оборотов в два раза. Если в цепь обмотки возбуждения подключить сопротивление, то это позволит повышать обороты до 4 раз. Применение реостата связано с выделением тепла. Поэтому в современных конструкциях двигателей реостаты заменяют электронными элементами, управляющими скоростью без сильного нагревания. На коэффициент полезного действия мотора, работающего на постоянном токе, влияет его мощность. Слабые модели электродвигателей обладают малой эффективностью, и их КПД около 40%, в то время, как электродвигатели мощностью 1 МВт могут обладать коэффициентом полезного действия до 96%. electrosam.ru Наличие обмотки возбуждения (ОВ) у двигателя постоянного тока позволяет осуществлять различные схемы подключения. В зависимости от того как включена ОВ, различают двигатели с независимым возбуждением, с самовозбуждением, которое делится на последовательное, параллельное и смешанное. В ДПТ с независимым возбуждением обмотку возбуждения подключают к отдельному источнику питания (рис. 1). Это может быть связано с различными напряжениями возбуждение Uв и напряжения цепи якоря U. При данной схеме подключения ОВ не имеет электрической связи с обмоткой якоря. Для уменьшения потерь в ОВ, и создания необходимой МДС необходимо уменьшить ток возбуждения, увеличив число витков. Обмотку возбуждения выполняют из малого числа витков, так чтобы ток Iв составлял 2…5% от Iя. Выбор данной схемы возбуждения для двигателя зависит от свойств электропривода. По сути, схема подключения ОВ с параллельным возбуждением(рис.2) аналогична схеме с независимым возбуждением. Свойства двигателя при подключении по обеим схемам одинаковы. Плюсом данного вида подключения является то, что отпадает необходимость в отдельном источнике питания. При подключении по данной схеме ОВ соединена последовательно цепи якоря (рис.3), при этом ток якоря равен току возбуждения. В связи с этим ОВ изготавливают из провода толстого сечения. Данную схему используют, если требуется обеспечить большой пусковой момент. При уменьшении нагрузки на валу меньше 25% от номинальной, частота вращения резко увеличивается и достигает опасных для двигателя значений. Характеристика ДПТ с последовательным возбуждением “мягкая”. ДПТ со смешанным возбуждением (рис.4) имеет две ОВ, одна из которых соединена последовательна, а другая параллельно якорной цепи. При согласном соединении обмоток с увеличением нагрузки на валу растёт магнитный поток, что приводит к уменьшению частоты вращения. При встречном соединении суммарный магнитный поток с увеличением нагрузки уменьшается, что приводит к резкому увеличению частоты вращения. Это приводит двигатель к нестабильному режиму работы, поэтому последовательную обмотку выполняют из малого числа витков, чтобы при увеличении нагрузки магнитный поток снижался незначительно, тем самым стабилизируя работу двигателя. electroandi.ru Часто в условиях домашней мастерской, оснащенной различным оборудованием и механизмами, возникает необходимость подключения к сети двигателя постоянного тока. Самой востребованной и популярной выступает схема с использованием пускового реостата. Этот элемент отвечает за понижение показателей пускового тока, возникающего при включении двигателя. Пусковой ток нуждается в корректировке, так как превышает номинальный показатель в 10-20р. Двигатель постоянного тока, а точнее обмотка может не справиться с такой нагрузкой. На схеме ниже представлено подключение пускового реостата по последовательной схеме с цепью якоря. Расшифровка обозначений: Включение и управление двигателем постоянного тока важно выполнять, принимая во внимание информацию, приведенную на самом агрегате или в инструкции (если таковая еще сохранилась). Представленная схема двигателя постоянного тока оптимальна для агрегатов, мощность которых превышает 0,5кВт. Чтобы рассчитать пусковое сопротивление реостата, воспользуйтесь формулой: Расшифровка обозначений: Rn – пусковое сопротивление реостата, U – напряжение сети (100 или 220), Iном – номинальное значение тока электрического двигателя, Rя – показатели сопротивления обмотки якоря. Схема двигателя постоянного тока предполагает и определенную последовательность действий для его отключения. Двигатель постоянного тока отключается не сразу. После перевода рукояти реостата в крайнее левое положение агрегат отключится, но обмотка останется замкнутой. Только после этого питание двигателя можно выключать. Если игнорировать приведенный выше порядок действий, при размыкании цепи велик риск возникновения напряжения такой силы, которая выведет электрический двигатель из строя. Включение двигателя постоянного тока для промышленных применений может отличаться. www.deltaprivod.ru При пуске двигателя в ход необходимо: 1) обеспечить надлежащий пусковой момент и условия для достижения необходимой скорости вращения; 2) предотвратить возникновение чрезмерного пускового тока, опасного для двигателя.Возможны три способа пуска двигателя в ход: 1) прямой пуск, когда цепь якоря подключается непосредственно к сети на ее полное напряжение; 2) пуск с помощью пускового реостата или пусковых сопротивлений, включаемых последовательно в цепь якоря; 3) пуск при пониженном напряжении цепи якоря. При n = 0 также Eа = 0 и, согласно выражению (5), в статье "Общие сведения о двигателях постоянного тока" В нормальных машинах Rа = 0,02 – 0,1, и поэтому при прямом пуске с U = Uн ток якоря недопустимо велик: Iа = (5 – 10) Iн . Вследствие этого прямой пуск применяется только для двигателей мощностью до нескольких сотен ватт, у которых Rа относительно велико и поэтому при пуске Iа ≤ (4 – 6) Iн, а процесс пуска длится не более 1 – 2 с. Рисунок 1. Схема пуска двигателя параллельного возбуждения с помощью пускового реостата (а) и пусковых сопротивлений (б) Для двигателей с параллельным возбуждением самым распространенным является пуск с помощью пускового реостата или пусковых сопротивлений (рисунок 1).При этом вместо выражения (5), в статье "Общие сведения о двигателях постоянного тока" имеем а в начальный момент пуска, при n = 0, где Rп – сопротивление пускового реостата, или пусковое сопротивление. Значение Rп подбирается так, чтобы в начальный момент пуска было Iа = (1,4 – 1,7) Iн [в малых машинах до (2,0 – 2,5) Iн]. Рассмотрим подробнее пуск двигателя параллельного возбуждения с помощью реостата (рисунок 1, а). Перед пуском (t < 0) подвижный контакт П пускового реостата стоит на холостом контакте 0 и цепь двигателя разомкнута. В начальный момент пуска (t = 0) подвижный контакт П с помощью рукоятки переводится на контакт 1, и через якорь пойдет ток Iа, определяемый равенством (3). Цепь обмотки возбуждения ОВ подключается к неподвижной контактной дуге д, по которой скользит контакт П, чтобы во время пуска цепь возбуждения все время была под полным напряжением. Это необходимо для того, чтобы iв и Фδ при пуске были максимальными и постоянными, так как при этом, согласно выражению (8), в статье "Общие сведения о двигателях постоянного тока", при данных значениях Iа развивается наибольший момент М. С этой же целью регулировочный реостат возбуждения ставится при пуске в положение Rп.в = 0. При положении контакта П пускового реостата на контакте 1 (t = 0) возникают токи Iа и iв, а так же момент М, и если М больше Мст, то двигатель придет во вращение и скорость n будет расти со значения n = 0 (рисунок 2). При этом в якоре будет индуктироваться электродвижущая сила (э. д. с.) Eа ∼ n и, согласно выражениям (2) и (8), представленных в статье "Общие сведения о двигателях постоянного тока", Iа и M, а также скорость нарастания n будут уменьшаться. Изменение этих величин при Mст = const происходит по экспоненциальному закону. Когда Iа достигнет значения Iа мин = (1,1 – 1,3) Iн, контакт П пускового реостата переведется на контакт 2. Вследствие уменьшения Rп ток Iа ввиду малой индуктивности цепи якоря почти мгновенно возрастет, M также увеличится, n будет расти быстрее и в результате увеличения Eа значения Iа и M снова будут уменьшаться (рисунок 2). Подобным же образом развивается процесс пуска при последовательном переключении реостата в положения 3, 4 и 5, после чего двигатель достигнет установившегося режима работы со значениями Iа и n, определяемыми условием M = Mст [смотрите равенства (8) и (9), в статье "Общие сведения о двигателях постоянного тока"]. При пуске на холостом ходу Mст = M0. Ток Iа = Iа0 в этом случае мал и составляет обычно 3 – 8 % от Iн. Заштрихованные на рисунке 2 ординаты представляют собой, согласно выражению (2), представленного в статье "Общие сведения о двигателях постоянного тока", значения избыточного, или динамического, момента Mдин = M – Mст , под воздействием которого происходит увеличение n. Число ступеней пускового реостата и значения их сопротивлений рассчитываются таким образом, чтобы при надлежащих интервалах времени переключение ступеней максимальные и минимальные значения Iа на всех ступенях получилось одинаковыми. По условиям нагрева ступени реостата рассчитываются на кратковременную работу под током. Остановка двигателя производится путем его отключения от сети с помощью рубильника или другого выключателя. Схема рисунка 1 составлена так, чтобы при отключении двигателя цепь обмотки возбуждения не размыкалась, а оставалась замкнутой через якорь. При этом ток в обмотке возбуждения после отключения двигателя уменьшается до нуля не мгновенно, а с достаточно большой постоянной времени. Благодаря этому предотвращается индуктирование в обмотке возбуждения большой э. д. с. самоиндукции, которая может повредить изоляцию этой обмотки. Применяются также несколько видоизмененные по сравнению с рисунком 1, а схемы пусковых реостатов, без контактной дуги д. Конец цепи возбуждения при этом можно присоединить, например, к контакту 2, и при работе двигателя последовательно с обмоткой возбуждения будут включены последние ступени реостата. Поскольку их сопротивление по сравнению с Rв = rв + Rр.в мало, то это не оказывает большого влияния на работу двигателя. Автоматизировать переключение пускового реостата неудобно. Поэтому в автоматизированных установках вместо пускового реостата используют пусковые сопротивления (рисунок 1, б), которые поочередно шунтируются контактами К1, К2, К3 автоматически работающих контакторов. Для упрощения схемы и уменьшения количества аппаратов число ступеней принимается минимальным (у двигателей малой мощности обычно 1 – 2 ступени). Ни в коем случае нельзя допускать разрыва цепи параллельного возбуждения. В этом случае поток возбуждения исчезает ни сразу, а поддерживается индуктируемыми в ярме вихревыми токами. Однако этот поток будет быстро уменьшаться и скорость n, согласно выражению (7), представленного в статье "Общие сведения о двигателях постоянного тока", будет сильно увеличиваться ("разнос" двигателя). При этом [смотрите равенство 8, в статье "Общие сведения о двигателях постоянного тока"] ток якоря значительно возрастет и возникнет круговой огонь, вследствие чего возможно повреждение машины, и поэтому, в частности, в цепях возбуждения не ставят предохранителей и выключателей. Ограничение пускового тока достигается также в случае питания цепи якоря при пуске от отдельного источника тока с регулируемым напряжением (отдельный генератор постоянного тока, управляемый выпрямитель). Обмотку возбуждения при этом необходимо питать от другого источника, с полным напряжением, чтобы иметь при пуске полный ток iв. Этот способ пуска применяют чаще всего для мощных двигателей, притом в сочетании с регулированием скорости вращения. Пуск двигателей последовательного и смешанного возбуждения производится аналогичным образом. Схема пуска двигателя смешанного возбуждения ничем не отличается от схемы пуска двигателя параллельного возбуждения (рисунок 1), а схема пуска двигателя последовательного возбуждения упрощается за счет исключения параллельной цепи возбуждения. Для изменения направления вращения (реверсирования) двигателя необходимо изменить направление тока в якоре (вместе с добавочными полюсами и компенсационной обмоткой) или в обмотке (обмотках) возбуждения. Источник: Вольдек А. И., "Электрические машины. Учебник для технических учебных заведений" – 3-е издание, переработанное – Ленинград: Энергия, 1978 – 832с. www.electromechanics.ru Двигатель постоянного тока последовательного возбуждения представляет собой электрическую машину постоянного тока, в которой обмотка возбуждения подключена последовательно с обмоткой якоря. Для данного типа двигателей справедливо равенство: ток, протекающий в якорной обмотке, равен току в обмотке возбуждения I=Iв=Iя, что является его главной отличительной особенностью от остальных типов двигателей. Рисунок 1 – Схема подключения ДПТ ПВ Стоит обратить внимание на зависимость магнитного потока от нагрузки Ф=f(Iя). Если двигатель будет работать на 25% своей номинальной мощности или меньше, то магнитный поток будет крайне мал, что приведет к постоянному увеличению скорости вала. Препятствовать разгону будут лишь механические потери, и двигатель пойдет в "разнос". Это приведет к быстрому выходу машины из строя. Все описанное в соответствии с формулой: Исходя из вышесказанного, ДПТ ПВ нельзя использовать на холостом ходу, постоянно требуется контроль тока якоря. С этой целью последовательно с обмоткой возбуждения устанавливают минимальное токовое реле, которое замыкает якорную цепь только в том случае, если нагрузка на валу достаточна для поддержания номинальной работы двигателя. Пуск двигателя производят с пусковым сопротивлением, также включенным последовательно в цепь якоря. После пуска это сопротивление выводят, и машина продолжает работать в номинальном режиме на своей естественной характеристике. Механическая и электромеханическая характеристики ДПТ ПВ одинаковы и имеют гиперболический вид (рисунок 2). Рисунок 2 – Механическая и электромеханическая характеристики ДПТ ПВ Скорость вращения ротора двигателя постоянного тока с последовательным возбуждением производится регулированием двух параметров: Для изменения скорости при помощи входного напряжения, в роторную цепь вводят специальное добавочное сопротивление, или же можно использовать пусковой реостат и для этой цели. Но следует заметить, данный способ является крайне неэкономичным и нецелесообразным, так как большое количество энергии будет рассеиваться на реостате. Регулировка скорости изменением магнитного потока, осуществляется включением реостата параллельно обмотке возбуждения. Изменяя сопротивление – меняем ток, протекающий через обмотку возбуждения. Иногда обмотку возбуждения разбивают на несколько параллельных секций. В некоторых типах двигателей предусмотрена возможность отключения витков обмотки, так добиваются того же эффекта регулирования. В данном двигателе отсутствует режим генераторного торможения с отдачей энергии в сеть. На рисунке 2 вы можете видеть, что ветка гиперболы естественной характеристики не пересекает ось ординат (отрицательная скорость отсутствует). Торможение противовключением получают путем переключения выводов якорной обмотки. ДПТ ПВ нельзя соединять с механизмом при помощи ременной передачи, так как соскакивание или разрыв ремня приведет к разгрузке двигателя, что вызовет мгновенное повышение числа оборотов и последующему выходу из строя. ДПТ ПВ нашли свое основное применение в качестве тяговых двигателей подвижного состава электровозов общего назначения, электровозов метрополитена и в трамваях. h4e.ru32. Основные схемы включения дпт. Независимое возбуждение. Схемы подключения двигателей постоянного тока
Как подключить двигатель постоянного тока?
Как работает электрический двигатель?

Различные схемы подключения обмоток

32. Основные схемы включения дпт. Независимое возбуждение
Параллельное возбуждение
Последовательное возбуждение
Смешанное возбуждение
33. Характеристика дпт с независимым возбуждением.
Механическая характеристика двигателя постоянного тока независимого возбуждения (дпт нв)
Электродвигатели постоянного тока. Устройство и работа. Виды
Устройство и принцип работы
Для поочередной подачи тока на обмотки якоря применяются специальные щетки из сплава графита и меди.
Виды
Электродвигатели постоянного тока разделяют по характеру возбуждения.
Независимое возбуждение
Параллельное возбуждение
Последовательное возбуждение
Смешанное возбуждение
Особенности эксплуатации
НедостаткиСфера использования
Широко популярными двигатели постоянного тока стали в электрическом транспорте. Такие двигатели обычно входят в конструкции:
Похожие темы:Возбуждение двигателя постоянного тока
Двигатель с независимым возбуждением

ДПТ с параллельным возбуждением

ДПТ с последовательным возбуждением

ДПТ со смешанным возбуждением

Схема включения двигателя постоянного тока в сеть 110 и 220вольт


Порядок и схема включения двигателя постоянного тока

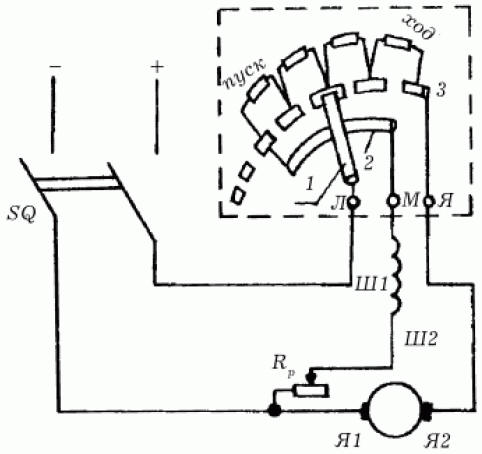
Пуск двигателей постоянного тока
Прямой пуск
Пуск с помощью пускового реостата или пусковых сопротивлений


(2) 
(3) 
Рисунок 2. Зависимость Iа, M и n от времени при пуске двигателя Пуск при пониженном напряжении цепи якоря
Двигатель постоянного тока последовательного возбуждения (ДПТ ПВ) - Help for engineer
Двигатель постоянного тока последовательного возбуждения (ДПТ ПВ)

- питающее напряжение;
- магнитный поток полюсов двигателя.
Тормозные режимы
Добавить комментарий

интернет-магазин светодиодного освещения
Пн - Вс с 10:30 до 20:00
Санкт-Петербург, просп. Энгельса, 138, корп. 1, тк ''Стройдвор''









Поделиться с друзьями: