Пропорционально-интегрально-дифференциальный (ПИД) регулятор — устройство в цепи обратной связи, используемое в системах автоматического управления для поддержания заданного значения измеряемого параметра. ПИД-регулятор измеряет отклонение стабилизируемой величины от заданного значения (уставки) и выдаёт управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально этому отклонению, второе пропорционально интегралу отклонения и третье пропорционально производной отклонения (или, что то же самое, производной измеряемой величины). Если какие-то из составляющих не используются, то регулятор называют пропорционально-интегральным, пропорционально-дифференциальным, пропорциональным и т. п. Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени. Он тем больше, чем больше это отклонение. Если входной сигнал равен уставке, то выходной равен нулю. Однако при использовании только пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал (мощность нагревателя) постепенно уменьшается при приближении температуры к уставке, и система стабилизируется при мощности равной тепловым потерям. Температура не может достичь уставки, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать. Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость. Для устранения статической ошибки используют интегральную составляющую. Она позволяет регулятору «учиться» на предыдущем опыте. Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечивать интегральная составляющая. Дифференциальная составляющая противодействует предполагаемым отклонениям регулируемой величины, которые могут произойти в будущем. Эти отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему. Чем быстрее регулируемая величина отклоняется от уставки, тем сильнее противодействие, создаваемое дифференциальной составляющей. Назначение ПИД-регулятора — в поддержании заданного значения x0 некоторой величины x с помощью изменения другой величины u. Значение x0 называется уставкой, а разность e = (x0 − x) — невязкой или рассогласованием. Выходной сигнал регулятора u определяется тремя слагаемыми: где Кp, Кi, Кd — коэффициенты усиления пропорциональной, интегральной и дифференциальной составляющих регулятора, соответственно. Большинство методов настройки ПИД-регуляторов используют несколько иную формулу для выходного сигнала, в которой на пропорциональный коэффициент усиления умножены также интегральная и дифференциальная составляющие: Часто в качестве параметров ПИД-регулятора используются: Следует учитывать, что термины используются по-разному в различных источниках и разными производителями регуляторов. Эта страница использует содержимое раздела Википедии на русском языке. Оригинальная статья находится по адресу: ПИД-регулятор. Список первоначальных авторов статьи можно посмотреть в истории правок. Эта статья так же, как и статья, размещённая в Википедии, доступна на условиях CC-BY-SA . ru.vlab.wikia.com Есть более «оптимизированный» метод подбора коэффициентов – метод Зиглера–Никольса. Сразу скажу, что метод работает не для любой системы, результаты получаются не самыми оптимальными. Но, зато, метод очень простой и годится для базовой настройки регулятора в большинстве систем. Суть метода состоит в следующем: 1. Выставляем все коэффициенты (Kp, Ki, Kd) в 0.
2. Начинаем постепенно увеличивать значение Kp и следим за реакцией системы. Нам нужно добиться, чтобы в системе начались устойчивые колебания (вызванные перерегулированием). Увеличиваем Kp, пока колебания системы не стабилизируются (перестанут затухать).
3. Запоминаем текущее значение Kp (обозначим его Ku) и замеряем период колебаний системы (Tu). Все. Теперь используем полученные значения Ku и Tu для расчета всех параметров ПИД регулятора по формулам: Kp = 0.6 * Ku
Ki = 2 * Kp / Tu
Kd = Kp * Tu / 8 Готово. Для дискретных регуляторов нужно еще учесть период дискретизации – T ( умножить на Ki та Т, разделить Kd на Т). Еще раз повторюсь, ТАУ изучать нужно, синтез регуляторов рулит, описанный метод годится для базовой настройки, подходит не для всех систем и т. д. Но данный метод очень простой, и вполне годится для «бытового» уровня.
we.easyelectronics.ru Материал из Википедии — свободной энциклопедии Если какие-то из составляющих не используются, то регулятор называют пропорционально-интегрирующим, пропорционально-дифференцирующим, пропорциональным и т. д. Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени. Он тем больше, чем больше это отклонение. Если входной сигнал равен заданному значению, то выходной равен нулю. Однако при использовании только пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал (мощность нагревателя) постепенно уменьшается при приближении температуры к заданной, и система стабилизируется при мощности, равной тепловым потерям. Температура не может достичь заданного значения, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать. Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления при наличии задержек (запаздывания) в системе могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость. Интегрирующая составляющая пропорциональна интегралу по времени от отклонения регулируемой величины. Её используют для устранения статической ошибки. Она позволяет регулятору со временем учесть статическую ошибку. Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечиваться интегрирующей составляющей. Тем не менее, интегрирующая составляющая также может приводить к автоколебаниям при неправильном выборе её коэффициента. Дифференцирующая составляющая пропорциональна темпу изменения отклонения регулируемой величины и предназначена для противодействия отклонениям от целевого значения, которые прогнозируются в будущем. Отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему. Назначение ПИД-регулятора — в поддержании заданного значения x0 некоторой величины x с помощью изменения другой величины u. Значение x0 называется заданным значением (или уставкой, в технике), а разность e = (x0 − x) — невязкой (или ошибкой [регулирования], в технике), рассогласованием или отклонением величины от заданной. Приведённые ниже формулы справедливы в случае линейности и стационарности системы, что редко выполняется на практике. Выходной сигнал регулятора u определяется тремя слагаемыми: где Кp, Кi, Кd — коэффициенты усиления пропорциональной, интегрирующей и дифференцирующей составляющих регулятора соответственно. Большинство методов настройки ПИД-регуляторов используют несколько иную формулу для выходного сигнала, в которой на пропорциональный коэффициент усиления умножены также интегрирующая и дифференцирующая составляющие: В дискретной реализации метода расчета выходного сигнала уравнение принимает следующую форму: где <math>T</math> — время дискретизации. Используя замену <math>K^{discr}_i=K_p K_{ip}T, K^{discr}_d=\frac{K_p K_{dp}}{T}</math> можно записать: В программной реализации для оптимизации расчетов переходят к рекуррентной формуле: Часто в качестве параметров ПИД-регулятора используются: Следует учитывать, что термины используются по-разному в различных источниках и разными производителями регуляторов. Теоретические методы анализа системы с ПИД-регулятором редко применяются на практике. Основная сложность практического применения — незнание характеристик объекта управления. Кроме того, существенную проблему представляют нелинейность и нестационарность системы. Практические регуляторы работают в ограниченном сверху и снизу диапазоне, поэтому в принципе нелинейны. В этой связи получили распространение методы экспериментальной настройки регулятора, подключенного к объекту управления. Прямое использование формируемой алгоритмом управляющей величины также имеет свою специфику. Например, при регулировке температуры часто управляют не одним, а двумя устройствами, одно из них управляет подачей горячего теплоносителя для нагрева, а другое управляет хладагентом для охлаждения. Часто рассматриваются три варианта практических регуляторов. В первом варианте, наиболее близком к теоретическому описанию, выход регулятора — непрерывная аналоговая ограниченная величина. Во втором случае выход представляет собой поток импульсов, который может управлять шаговым двигателем. В третьем случае регулятор выходной управляющий сигнал используется для широтно-импульсной модуляции. В современных системах автоматизации, которые, как правило, строятся на базе PLC ПИД-регуляторы реализуются либо как специализированные аппаратные модули, включаемые в состав управляющего контроллера, либо программными методами, с применением специализированных библиотек. Производители контроллеров часто разрабатывают специализированное ПО (тюнеры) для настройки коэффициентов регулятора. Друзья молчали. Ни тот, ни другой не начинал говорить. Пьер поглядывал на князя Андрея, князь Андрей потирал себе лоб своею маленькою рукой.
– Пойдем ужинать, – сказал он со вздохом, вставая и направляясь к двери.
Они вошли в изящно, заново, богато отделанную столовую. Всё, от салфеток до серебра, фаянса и хрусталя, носило на себе тот особенный отпечаток новизны, который бывает в хозяйстве молодых супругов. В середине ужина князь Андрей облокотился и, как человек, давно имеющий что нибудь на сердце и вдруг решающийся высказаться, с выражением нервного раздражения, в каком Пьер никогда еще не видал своего приятеля, начал говорить:
– Никогда, никогда не женись, мой друг; вот тебе мой совет: не женись до тех пор, пока ты не скажешь себе, что ты сделал всё, что мог, и до тех пор, пока ты не перестанешь любить ту женщину, какую ты выбрал, пока ты не увидишь ее ясно; а то ты ошибешься жестоко и непоправимо. Женись стариком, никуда негодным… А то пропадет всё, что в тебе есть хорошего и высокого. Всё истратится по мелочам. Да, да, да! Не смотри на меня с таким удивлением. Ежели ты ждешь от себя чего нибудь впереди, то на каждом шагу ты будешь чувствовать, что для тебя всё кончено, всё закрыто, кроме гостиной, где ты будешь стоять на одной доске с придворным лакеем и идиотом… Да что!…
Он энергически махнул рукой.
Пьер снял очки, отчего лицо его изменилось, еще более выказывая доброту, и удивленно глядел на друга.
– Моя жена, – продолжал князь Андрей, – прекрасная женщина. Это одна из тех редких женщин, с которою можно быть покойным за свою честь; но, Боже мой, чего бы я не дал теперь, чтобы не быть женатым! Это я тебе одному и первому говорю, потому что я люблю тебя.
Князь Андрей, говоря это, был еще менее похож, чем прежде, на того Болконского, который развалившись сидел в креслах Анны Павловны и сквозь зубы, щурясь, говорил французские фразы. Его сухое лицо всё дрожало нервическим оживлением каждого мускула; глаза, в которых прежде казался потушенным огонь жизни, теперь блестели лучистым, ярким блеском. Видно было, что чем безжизненнее казался он в обыкновенное время, тем энергичнее был он в эти минуты почти болезненного раздражения.
– Ты не понимаешь, отчего я это говорю, – продолжал он. – Ведь это целая история жизни. Ты говоришь, Бонапарте и его карьера, – сказал он, хотя Пьер и не говорил про Бонапарте. – Ты говоришь Бонапарте; но Бонапарте, когда он работал, шаг за шагом шел к цели, он был свободен, у него ничего не было, кроме его цели, – и он достиг ее. Но свяжи себя с женщиной – и как скованный колодник, теряешь всякую свободу. И всё, что есть в тебе надежд и сил, всё только тяготит и раскаянием мучает тебя. Гостиные, сплетни, балы, тщеславие, ничтожество – вот заколдованный круг, из которого я не могу выйти. Я теперь отправляюсь на войну, на величайшую войну, какая только бывала, а я ничего не знаю и никуда не гожусь. Je suis tres aimable et tres caustique, [Я очень мил и очень едок,] – продолжал князь Андрей, – и у Анны Павловны меня слушают. И это глупое общество, без которого не может жить моя жена, и эти женщины… Ежели бы ты только мог знать, что это такое toutes les femmes distinguees [все эти женщины хорошего общества] и вообще женщины! Отец мой прав. Эгоизм, тщеславие, тупоумие, ничтожество во всем – вот женщины, когда показываются все так, как они есть. Посмотришь на них в свете, кажется, что что то есть, а ничего, ничего, ничего! Да, не женись, душа моя, не женись, – кончил князь Андрей.
– Мне смешно, – сказал Пьер, – что вы себя, вы себя считаете неспособным, свою жизнь – испорченною жизнью. У вас всё, всё впереди. И вы…
Он не сказал, что вы , но уже тон его показывал, как высоко ценит он друга и как много ждет от него в будущем.
«Как он может это говорить!» думал Пьер. Пьер считал князя Андрея образцом всех совершенств именно оттого, что князь Андрей в высшей степени соединял все те качества, которых не было у Пьера и которые ближе всего можно выразить понятием – силы воли. Пьер всегда удивлялся способности князя Андрея спокойного обращения со всякого рода людьми, его необыкновенной памяти, начитанности (он всё читал, всё знал, обо всем имел понятие) и больше всего его способности работать и учиться. Ежели часто Пьера поражало в Андрее отсутствие способности мечтательного философствования (к чему особенно был склонен Пьер), то и в этом он видел не недостаток, а силу.
В самых лучших, дружеских и простых отношениях лесть или похвала необходимы, как подмазка необходима для колес, чтоб они ехали.
– Je suis un homme fini, [Я человек конченный,] – сказал князь Андрей. – Что обо мне говорить? Давай говорить о тебе, – сказал он, помолчав и улыбнувшись своим утешительным мыслям.
Улыбка эта в то же мгновение отразилась на лице Пьера.
– А обо мне что говорить? – сказал Пьер, распуская свой рот в беззаботную, веселую улыбку. – Что я такое? Je suis un batard [Я незаконный сын!] – И он вдруг багрово покраснел. Видно было, что он сделал большое усилие, чтобы сказать это. – Sans nom, sans fortune… [Без имени, без состояния…] И что ж, право… – Но он не сказал, что право . – Я cвободен пока, и мне хорошо. Я только никак не знаю, что мне начать. Я хотел серьезно посоветоваться с вами.
Князь Андрей добрыми глазами смотрел на него. Но во взгляде его, дружеском, ласковом, всё таки выражалось сознание своего превосходства. wiki-org.ru ПИД-регулятор – самый сбалансированный из всех регуляторов, построенных на основе типовых звеньев, поэтому широко применяется в различных сферах. По сути, даное устройство это эволюция ПИ-регулятора. Пропорциональная составляющая вырабатывает сигнал, который противодействует отклонению регулируемой величины в данный момент времени (идеология чисто П-регулятора). Интегральная составляющая накапливает результирующее значение, нивелируя, таким образом, недостаток П-регулятора – наличие статической ошибки. ПИД-регулятор обладает Д-составляющей, которая как бы прогнозирует отклонение от задания и следит за скоростью отклонения, поэтому является самой быстрой в данном алгоритме. По сути, это является преимуществом и недостатком одновременно. Это все стоит учитывать при выборе закона регулирования. В случаи если вход регулятора зашумлен, имеют место существенные скачки регулируемой величины или процесс имеет стохастический характер — дифференциальная составляющая в миг приведет вашу систему к расходящемуся процессу. Выбор время дифференцирования – очень сложное и ответственное решение для инженера. Рассмотрим же математическое описание «идеального» ПИД-регулятора. Формула выходного сигнала: где: Как видно из формулы, дифференциальная часть – производная от ошибки, да ещё и с коэффициентом Тд – временем дифференцирования. Эта часть может существенно уменьшить время регулирования и улучшить динамическое качество регулирования. ПИД-регулятор можно просто собрать используя схуму, полученную типовым соединением звеньев – параллельным. Схема для моделирования. Тд=0.2 с, Кд =1 (усиление упреждения) Как видим, в начальный момент времени, ПИД-регулятор дает бесконечный выброс выходной величины. Это имеет место потому, что реакция идеального дифференцирующего звена (которым в данном случае является д-часть алгоритма) на ступенчатое воздействие – это дельта функция. Она имеет бесконечно большой заброс в момент приложения ступенчатого воздействия. ПИД-регулятор работает таким образом, что дифференцирования при применении ИДЗ никак не влияет на результирующее значение выхода регулятора. Идеальное дифференцирующее звено физически нереализуемо, так как невозможно создать элемент, у которого выходной сигнал будет появляться раньше, чем сигнал на входе. И вообще, в прикладной теории управления не существует передаточных функций, в которых порядок числителя выше порядка знаменателя. Д-часть можно реализовать, используюя реальное дифференцирующее звено (РДЗ). Схема для моделирования. Тд=0.2 с, Кд =1 (усиление упреждения) Для определения время дифференцирования стоит лишь провести подкасательную кривой до пересечения с ожидаемым значением E*K и поделить полученное значение на коэффициент усиления упреждения Кд, который в нашем случае равняется 1. Для остальных параметров настройки П, ПИ, ПИД-регуляторы имеют одинаковые методики их определения. Tags законы регулирования общие сведения autoworks.com.ua Пропорционально-интегрально-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования. Если какие-то из составляющих не используются, то регулятор называют пропорционально-интегрирующим, пропорционально-дифференцирующим, пропорциональным и т. д. Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени. Он тем больше, чем больше это отклонение. Если входной сигнал равен заданному значению, то выходной равен нулю. Однако при использовании только пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал (мощность нагревателя) постепенно уменьшается при приближении температуры к заданной, и система стабилизируется при мощности, равной тепловым потерям. Температура не может достичь заданного значения, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать. Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления при наличии задержек (запаздывания) в системе могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость. Интегрирующая составляющая пропорциональна интегралу по времени от отклонения регулируемой величины. Её используют для устранения статической ошибки. Она позволяет регулятору со временем учесть статическую ошибку. Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечиваться интегрирующей составляющей. Тем не менее, интегрирующая составляющая также может приводить к автоколебаниям при неправильном выборе её коэффициента. Дифференцирующая составляющая пропорциональна темпу изменения отклонения регулируемой величины и предназначена для противодействия отклонениям от целевого значения, которые прогнозируются в будущем. Отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему. Назначение ПИД-регулятора — в поддержании заданного значения x0 некоторой величины x с помощью изменения другой величины u. Значение x0 называется заданным значением (или уставкой, в технике), а разность e = (x0 − x) — невязкой (или ошибкой [регулирования], в технике), рассогласованием или отклонением величины от заданной. Приведённые ниже формулы справедливы в случае линейности и стационарности системы, что редко выполняется на практике. Выходной сигнал регулятора u определяется тремя слагаемыми: где Кp, Кi, Кd — коэффициенты усиления пропорциональной, интегрирующей и дифференцирующей составляющих регулятора соответственно. Большинство методов настройки ПИД-регуляторов используют несколько иную формулу для выходного сигнала, в которой на пропорциональный коэффициент усиления умножены также интегрирующая и дифференцирующая составляющие: В дискретной реализации метода расчета выходного сигнала уравнение принимает следующую форму: где T{\displaystyle T} — время дискретизации. Используя замену Kidiscr=KpKipT,Kddiscr=KpKdpT{\displaystyle K_{i}^{discr}=K_{p}K_{ip}T,K_{d}^{discr}={\frac {K_{p}K_{dp}}{T}}} можно записать: В программной реализации для оптимизации расчетов переходят к рекуррентной формуле: Часто в качестве параметров ПИД-регулятора используются: Следует учитывать, что термины используются по-разному в различных источниках и разными производителями регуляторов. Теоретические методы анализа системы с ПИД-регулятором редко применяются на практике. Основная сложность практического применения — незнание характеристик объекта управления. Кроме того, существенную проблему представляют нелинейность и нестационарность системы. Практические регуляторы работают в ограниченном сверху и снизу диапазоне, поэтому в принципе нелинейны. В этой связи получили распространение методы экспериментальной настройки регулятора, подключенного к объекту управления. Прямое использование формируемой алгоритмом управляющей величины также имеет свою специфику. Например, при регулировке температуры часто управляют не одним, а двумя устройствами, одно из них управляет подачей горячего теплоносителя для нагрева, а другое управляет хладагентом для охлаждения. Часто рассматриваются три варианта практических регуляторов. В первом варианте, наиболее близком к теоретическому описанию, выход регулятора — непрерывная аналоговая ограниченная величина. Во втором случае выход представляет собой поток импульсов, который может управлять шаговым двигателем. В третьем случае выходной управляющий сигнал регулятора используется для широтно-импульсной модуляции. В современных системах автоматизации, которые, как правило, строятся на базе PLC ПИД-регуляторы реализуются либо как специализированные аппаратные модули, включаемые в состав управляющего контроллера, либо программными методами, с применением специализированных библиотек. Производители контроллеров часто разрабатывают специализированное ПО (тюнеры) для настройки коэффициентов регулятора. wikiredia.ru Пропорционально-интегрально-дифференциальный (ПИД) регулятор — устройство в цепи обратной связи, используемое в системах автоматического управления для поддержания заданного значения измеряемого параметра. ПИД-регулятор измеряет отклонение стабилизируемой величины от заданного значения (уставки) и выдаёт управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально этому отклонению, второе пропорционально интегралу отклонения и третье пропорционально производной отклонения (или, что то же самое, производной измеряемой величины). Если какие-то из составляющих не используются, то регулятор называют пропорционально-интегральным, пропорционально-дифференциальным, пропорциональным и т. п. Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени. Он тем больше, чем больше это отклонение. Если входной сигнал равен уставке, то выходной равен нулю. Однако при использовании только пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал (мощность нагревателя) постепенно уменьшается при приближении температуры к уставке, и система стабилизируется при мощности равной тепловым потерям. Температура не может достичь уставки, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать. Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость. Для устранения статической ошибки используют интегральную составляющую. Она позволяет регулятору «учиться» на предыдущем опыте. Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечивать интегральная составляющая. Дифференциальная составляющая противодействует предполагаемым отклонениям регулируемой величины, которые могут произойти в будущем. Эти отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему. Чем быстрее регулируемая величина отклоняется от уставки, тем сильнее противодействие, создаваемое дифференциальной составляющей. Назначение ПИД-регулятора — в поддержании заданного значения x0 некоторой величины x с помощью изменения другой величины u. Значение x0 называется уставкой, а разность e = (x0 − x) — невязкой или рассогласованием. Выходной сигнал регулятора u определяется тремя слагаемыми: где Кp, Кi, Кd — коэффициенты усиления пропорциональной, интегральной и дифференциальной составляющих регулятора, соответственно. Большинство методов настройки ПИД-регуляторов используют несколько иную формулу для выходного сигнала, в которой на пропорциональный коэффициент усиления умножены также интегральная и дифференциальная составляющие: Часто в качестве параметров ПИД-регулятора используются: Следует учитывать, что термины используются по-разному в различных источниках и разными производителями регуляторов. ru.cybernetics.wikia.com Пропорционально-интегрально-дифференциальный (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования. Если какие-то из составляющих не используются, то регулятор называют пропорционально-интегральным, пропорционально-дифференциальным, пропорциональным и т. п. Пропорциональная составляющая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени. Он тем больше, чем больше это отклонение. Если входной сигнал равен заданному значению, то выходной равен нулю. Однако при использовании только пропорционального регулятора значение регулируемой величины никогда не стабилизируется на заданном значении. Существует так называемая статическая ошибка, которая равна такому отклонению регулируемой величины, которое обеспечивает выходной сигнал, стабилизирующий выходную величину именно на этом значении. Например, в регуляторе температуры выходной сигнал (мощность нагревателя) постепенно уменьшается при приближении температуры к заданной, и система стабилизируется при мощности равной тепловым потерям. Температура не может достичь заданного значения, так как в этом случае мощность нагревателя станет равна нулю, и он начнёт остывать. Чем больше коэффициент пропорциональности между входным и выходным сигналом (коэффициент усиления), тем меньше статическая ошибка, однако при слишком большом коэффициенте усиления, при наличии задержек в системе, могут начаться автоколебания, а при дальнейшем увеличении коэффициента система может потерять устойчивость. Интегральная составляющая пропорциональна интегралу от отклонения регулируемой величины. Её используют для устранения статической ошибки. Она позволяет регулятору со временем учесть статическую ошибку. Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечивать интегральная составляющая. Тем не менее, интегральная составляющая также может приводить к автоколебаниям. Дифференциальная составляющая пропорциональна темпу изменения отклонения регулируемой величины и предназначена для противодействия отклонениям от целевого значения, которые прогнозируются в будущем. Отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему. Назначение ПИД-регулятора — в поддержании заданного значения x0 некоторой величины x с помощью изменения другой величины u. Значение x0 называется заданным значением, а разность e = (x0 − x) — невязкой, рассогласованием или отклонением величины от заданной. Выходной сигнал регулятора u определяется тремя слагаемыми: где Кp, Кi, Кd — коэффициенты усиления пропорциональной, интегральной и дифференциальной составляющих регулятора, соответственно. Большинство методов настройки ПИД-регуляторов используют несколько иную формулу для выходного сигнала, в которой на пропорциональный коэффициент усиления умножены также интегральная и дифференциальная составляющие: В дискретной реализации метода расчета выходного сигнала уравнение принимает следующую форму: где — время дискретизации. Используя замену можно записать: В программной реализации для оптимизации расчетов переходят к рекуррентной формуле: Часто в качестве параметров ПИД-регулятора используются: Следует учитывать, что термины используются по-разному в различных источниках и разными производителями регуляторов. biograf.academic.ruПИД-регулятор. Pid регулятор
ПИД-регулятор | Virtual Laboratory Wiki
Файл:PID.png
Пропорциональная составляющая Править
Интегральная составляющая Править
Дифференциальная составляющая Править
$ P_b = \frac{1}{K_p} $
$ T_i = \frac{1}{K_i} $ $ T_d = {K_d}\; $ Простой метод настройки ПИД регулятора
 Есть два похода к настройке ПИД регулятора. Первый – синтез регулятора, то есть вычисление параметров регулятора на основании модели системы. Данный метод позволяет очень точно рассчитать параметры регулятора, но он требует основательного погружения в ТАУ. Второй метод – ручной подбор параметров (коэффициентов). Это метод научного тыка проб и ошибок. Берем готовую систему, меняем один (или сразу несколько коэффициентов) регулятора, включаем регулятор и смотрим за работой системы. В зависимости от того, как ведет себя система с выбранными коэффициентами (недо/пере регулирование) опять меняем коэффициенты и повторяем эксперимент. И т. д. Ну, такой метод имеет право на жизнь, главное представлять как изменение того или иного коэффициента повлияет на систему (что бы не действовать совсем наугад).
Есть два похода к настройке ПИД регулятора. Первый – синтез регулятора, то есть вычисление параметров регулятора на основании модели системы. Данный метод позволяет очень точно рассчитать параметры регулятора, но он требует основательного погружения в ТАУ. Второй метод – ручной подбор параметров (коэффициентов). Это метод научного тыка проб и ошибок. Берем готовую систему, меняем один (или сразу несколько коэффициентов) регулятора, включаем регулятор и смотрим за работой системы. В зависимости от того, как ведет себя система с выбранными коэффициентами (недо/пере регулирование) опять меняем коэффициенты и повторяем эксперимент. И т. д. Ну, такой метод имеет право на жизнь, главное представлять как изменение того или иного коэффициента повлияет на систему (что бы не действовать совсем наугад). ПИД-регулятор — Википедия (с комментариями)
 Пропорционально-интегрально-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.
Пропорционально-интегрально-дифференцирующий (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования. Общие сведения
Пропорциональная составляющая
Интегрирующая составляющая
Дифференцирующая составляющая
Теория

<math>P_b = \frac{1}{K_p}</math>
<math>T_i = \frac{1}{K_{ip}}</math> <math>T_d = {K_{dp}}\;</math>Практика применения
Напишите отзыв о статье "ПИД-регулятор"
Ссылки
См. также
Отрывок, характеризующий ПИД-регулятор
– Что мне за дело, что тут мсье Пьер, – вдруг сказала маленькая княгиня, и хорошенькое лицо ее вдруг распустилось в слезливую гримасу. – Я тебе давно хотела сказать, Andre: за что ты ко мне так переменился? Что я тебе сделала? Ты едешь в армию, ты меня не жалеешь. За что? – Lise! – только сказал князь Андрей; но в этом слове были и просьба, и угроза, и, главное, уверение в том, что она сама раскается в своих словах; но она торопливо продолжала: – Ты обращаешься со мной, как с больною или с ребенком. Я всё вижу. Разве ты такой был полгода назад? – Lise, я прошу вас перестать, – сказал князь Андрей еще выразительнее. Пьер, всё более и более приходивший в волнение во время этого разговора, встал и подошел к княгине. Он, казалось, не мог переносить вида слез и сам готов был заплакать. – Успокойтесь, княгиня. Вам это так кажется, потому что я вас уверяю, я сам испытал… отчего… потому что… Нет, извините, чужой тут лишний… Нет, успокойтесь… Прощайте… Князь Андрей остановил его за руку. – Нет, постой, Пьер. Княгиня так добра, что не захочет лишить меня удовольствия провести с тобою вечер. – Нет, он только о себе думает, – проговорила княгиня, не удерживая сердитых слез. – Lise, – сказал сухо князь Андрей, поднимая тон на ту степень, которая показывает, что терпение истощено. Вдруг сердитое беличье выражение красивого личика княгини заменилось привлекательным и возбуждающим сострадание выражением страха; она исподлобья взглянула своими прекрасными глазками на мужа, и на лице ее показалось то робкое и признающееся выражение, какое бывает у собаки, быстро, но слабо помахивающей опущенным хвостом. – Mon Dieu, mon Dieu! [Боже мой, Боже мой!] – проговорила княгиня и, подобрав одною рукой складку платья, подошла к мужу и поцеловала его в лоб. – Bonsoir, Lise, [Доброй ночи, Лиза,] – сказал князь Андрей, вставая и учтиво, как у посторонней, целуя руку.ПИД-регулятор






ПИД-регулятор Википедия
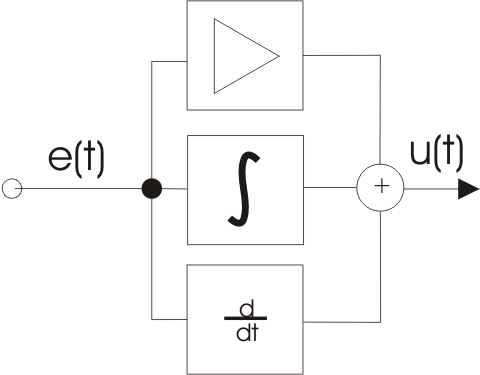
Схема, иллюстрирующая принцип работы ПИД-регулятора. Коэффициенты перед интегралом и производной опущены для большей наглядности иллюстрации. Общие сведения
Пропорциональная составляющая
Интегрирующая составляющая
Дифференцирующая составляющая
Теория
Система управления с обратной связью с участием ПИД-регулятора. Система управляет величиной y(t), то есть выводит величину y(t) на заданное извне значение u(t). На вход ПИД-регулятора подаётся ошибка e(t), выход ПИД-регулятора является управляющим воздействием для некоторого процесса (для объекта управления), управляющего величиной y(t). Влияние изменения параметров PID (Kp,Ki,Kd) на переходную характеристику системы.
Pb=1Kp{\displaystyle P_{b}={\frac {1}{K_{p}}}}
Ti=1Kip{\displaystyle T_{i}={\frac {1}{K_{ip}}}} Td=Kdp{\displaystyle T_{d}={K_{dp}}\;}Практика применения
Ссылки
См. также
ПИД-регулятор | Cybernetics Wiki | FANDOM powered by Wikia
Файл:PID.png
Пропорциональная составляющая Править
Интегральная составляющая Править
Дифференциальная составляющая Править
$ P_b = \frac{1}{K_p} $
$ T_i = \frac{1}{K_i} $ $ T_d = {K_d}\; $ регулятор - это... Что такое ПИД-регулятор?
Схема, иллюстрирующая принцип работы ПИД-регулятора. Коэффициенты перед интегралом и производной опущены для большей наглядности иллюстрации. Общие сведения
Пропорциональная составляющая
Интегральная составляющая
Дифференциальная составляющая
Теория
Ссылки

интернет-магазин светодиодного освещения
Пн - Вс с 10:30 до 20:00
Санкт-Петербург, просп. Энгельса, 138, корп. 1, тк ''Стройдвор''






Поделиться с друзьями: