
содержание ..
1
2
3
4
5
6
..
Учебно-методическое пособие и лабораторные работы
Часть 1
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
Белорусский национальный технический университет
МЕЖДУНАРОДНЫЙ ИНСТИТУТ ДИСТАНЦИОННОГО ОБРАЗОВАНИЯ
Кафедра «Информационные системы и технологии»
Ю. Е. Лившиц В. И. Лакин Ю. И. Монич
Учебно-методическое пособие и лабораторные работы для студентов всех форм
обучения специальностей
1-53 01 01 «Автоматизация технологических процессов и производств»,
1-53 01 06 «Промышленные роботы и робототехнические комплексы»,
1-40 01 01 «Программное обеспечение информационных технологий»,
1-40 01 02 «Информационные системы и технологии»
В 2 частях Ч а с т ь 1
Минск БНТУ 2014
УДК 004.382+004.31(076.5)(075.8) ББК 32.97я7
Л55
Рецензенты :
канд. техн. наук, доцент, заведующий кафедрой РЭС БГУИР
И. Н. Цырельчук ;
канд. техн. наук, доцент БГУИР В.
А. Алексеев
Л55
Лившиц, Ю. Е.
Программируемые логические контроллеры для управления технологическими
процессами : учебно-методическое пособие и лабораторные работы для студентов
всех форм обучения специальностей 1-53
01 01 «Автоматизация технологических процессов и производств, 1-53 01 06
«Промыш-
ленные роботы и робототехнические комплексы», 1-40 01 01 «Программное
обеспечение информационных технологий», 1-40 01 02 «Информационные системы и
технологии»:
в 2 ч. / Ю. Е. Лившиц, В. И. Лакин, Ю. И. Монич. – Минск : БНТУ, 2014. – Ч. 1. –
206 с.
ISBN 978-985-550-022-4 (Ч. 1).
В первой части учебно-методического пособия рассмотрены структура, основные
характеристики программируемых логических контроллеров (ПЛК). Показаны
возможности конфигурации системы управления на базе ПЛК Mitsubishi серии MELSEC
FX0S, FX2N.
Приведена классификация языков программирования ПЛК по стандарту МЭК 1131-3 и
основные правила составления программ на языке релейноконтактных схем (LD).
В приложениях дан краткий обзор стандартов сетевого взаимодействия ПЛК и
SCADA-систем.
Во второй части приведен курс лабораторных работ для получения практических
навыков создания автоматизированных систем управления на базе ПЛК.
Авторы глубоко признательны научно-производственному объединению «Техникон» за
информационную и техническую поддержку, которая позволила подготовить данное
издание.
УДК 004.382+004.31(076.5)(075.8)
ББК 32.97я7
ISBN 978-985-550-022-4 (Ч. 1) ©
Лившиц Ю. Е., Лакин В. И.,
ISBN 978-985-550-024-8 Монич
Ю. И., 2014
© Белорусский национальный технический университет, 2014
Введение 6
Раздел первый. Аппаратная часть контроллера 8
Глава 1. Общие сведения. Введение в ПЛК 8
Назначение и структура программируемого
контроллера 8
Классификация контроллеров 13
Глава 2. Основные характеристики и параметры ПЛК 18
Питание 22
Входы ПЛК 23
Выходы ПЛК 26
Время реакции – быстродействие 27
Глава 3. Установка и подключение ПЛК 31
Конструктивные элементы ПЛК 31
Размещение 32
Общие рекомендации по электробезопасности 34
Подключение источника питания 36
Подключение входов 38
Подключение выходов 42
Глава 4. Конфигурация системы 46
Наращивание количества входов/выходов 47
Модули аналоговых входов/выходов 48
Модули позиционирования 49
Аппаратные средства программирования 50
Средства визуализации процесса 50
Коммуникационные модули 51
Глава 5. Расчет энергопотребления 54
Глава 6. Вопрос выбора ПЛК 56
Из чего выбирать 56
Как выбирать 57
Раздел второй. Программирование контроллера 63
Глава 7. Основы программирования ПЛК. Реле и контроллер 63
Глава 8. Языки программирования, пакеты ПО 65
Глава 9. Организация PLCopen и уровни совместимости 66
Глава 10. Классификация языков по стандарту МЭК 1131-3 68
Язык релейно-контактных схем (LD) 69
Язык последовательных функциональных схем
(SFC) 69
Язык функциональных блоков (FBD) 71
Язык списка инструкций (IL) 72
Язык структурированного текста (ST) 72
Глава 11. Язык релейно-контактных схем ( LD ) 74
Основные команды 75
Программирование внутреннего реле 83
Программирование счетчика. Команда COUNTER 87
Программирование таймера. Команда TIMER 89
Программирование одиночных импульсов.
Команды (PLF) и (PLS) 95
Глава 12. Инструкции процесса отработки программы 97
Структуризация программы 97
Переход внутри программы (CJ) 98
Вызов подпрограммы (CALL / SRET) 99
Ввод прерывания программы (IRET, EI, DI) 101
Конец области программы (FEND) 104
Обновление таймера времени
работы программы (WDT) 105
Повторение части программы,
задание цикла (FOR, NEXT) 106
Программирование STL-инструкций 108
Глава 13. Высокоскоростные инструкции 128
Обновление входов и выходов (REF) 128
Использование высокоскоростного счетчика
(DHSCS, DHSCR) 129
Определение скорости (SPD) 131
Выдача определенного числа импульсов
(PLSY, DPLSY) 133
Выдача импульсов с модуляцией
ширины импульса [ШИМ] (PWM) 135
Выдача определенного числа импульсов (PLSR) 136
Глава 14. Регистры 139
Классификация регистров 139
Структура регистра 140
Применение индексных регистров 140
Применение регистров файлов 141
Регистры данных 142
Представление чисел 143
Глава 15. Работа с регистрами с помощью языка
релейно-контактных схем (LD) 148
Основные команды 148
Арифметические инструкции 156
Логические инструкции 162
Глава 16. Рекомендации по проектированию системы с ПЛК 166
Глава 17. Примеры программ 169
Штамповочная машина 169
Конвейер – Разделение потоков 174
Литература 176
ПРИЛОЖЕНИЕ А. Обзор стандартов сетевого
взаимодействия ПЛК 177
ПРИЛОЖЕНИЕ Б. Краткий обзор SCADA-систем 190
Необходимость использования контроллеров назрела в начале 1960-ых, когда
промышленность начала предъявлять высокие требования к эффективному
использованию производственных мощностей, а существующие решения на
основе релейно-контактных схем не могли обеспечить гибкое и эффективное
управление технологическими процессами, так как изменение
технологических циклов требовало замены большого числа элементов
управления и контроля. Громоздкость и ограниченный срок службы реле
требовали создания сложных систем контроля, а поиск неисправности среди
1000 реле требовал содержания большого числа специалистов. Создание
промышленных контроллеров позволило объединить сотни, тысячи реле,
таймеров, счетчиков в единый и компактный модуль. Возможность
перепрограммирования позволила предприятиям быстро перестраивать
производство в соответствии с требованиями рынка. Требования к
управлению на расстоянии начали появляться приблизительно в 1973. С
момента, когда Программируемые Логические Контроллеры (ПЛК) получили
возможность управлять другим ПЛК и могли находиться далеко от
оборудования, которым они управляли, вопрос о необходимости перехода на
повсеместное использование контроллеров стал очевидным для всех.
ПЛК может использоваться повсеместно там, где есть производство –
любая задача, которая требует использования электрических устройств
управления, имеет потребность в ПЛК. Например: предположим, что при
включении выключателя нам необходимо запустить электропривод на 15
секунд, а затем выключить независимо от того, как долго выключатель
включен. С помощью таймера мы можем легко решить эту задачу, но если для
решения технологического процесса необходимо включить 10 выключателей
и электроприводов? Нам потребуется 10 таймеров, а для расчета числа
циклов включения-выключения нам понадобится такое же количество внешних
счетчиков. Использование одного контроллера позволит легко решить эту
простую задачу, а возможность изменения программы даст возможность
максимально быстро менять технологический процесс в зависимости от
текущей задачи.
ПЛК ориентированы на длительную работу в условиях
промышленной среды. Это обуславливает определенную специфику
схемотехнических решений и конструктивного исполнения.
Хороший контроллер обладает мощной, совместимой и инту-
итивно понятной системой программирования, удобен в монтаже и
обслуживании, обладает высокой ремонтопригодностью, имеет развитые
средства самодиагностики и контроля правильности выполнения прикладных
задач, средства интеграции в единую систему, а также надежен и
неприхотлив.
РАЗДЕЛ ПЕРВЫЙ.
1.1
Назначение и структура программируемого контроллера
Программируемый логический контроллер (ПЛК) − специализированное
микропроцессорное устройство со встроенным аппаратным и программным
обеспечением, которое используется для выполнения функций управления
технологическим оборудованием. Прародителями ПЛК были релейные схемы
автоматики. Это "родство" до сих пор проявляется в виде жесткой
цикличности выполнения программы и своеобразного языка
программирования. ПЛК – устройство, доступное для программирования
неспециалисту в области информатики и предназначенное для управления
последовательными логическими процессами в условиях промышленной среды
в реальном масштабе времени. ПЛК циклически опрашивает входы, к которым
подключены выключатели, датчики и.т.д., и в зависимости от их состояния
(«включено» − 1, «выключено» − 0), включаетвыключает выходы, а
следовательно и подключенные к выходам исполнительные механизмы.
Функциональная схема системы управления (СУ) на базе контроллера
показана на рисунке 1.1. Используя программное обеспечение,
пользователь имеет возможность программировать контроллер или вносить
изменения в уже существующую программу.
Рисунок 1.1 – Функциональная схема СУ на базе ПЛК.
Программируемый логический контроллер, главным образом состоит из
центрального процессора (ЦП), области памяти и функций обработки
сигналов ввода/вывода (т.е., входов и выходов). Условно можно назвать
такой контроллер основным, или базовым блоком (модулем). Можно считать,
что ПЛК − это сотни или тысячи отдельных реле, счетчиков, таймеров и
память. Все эти счетчики, таймеры моделируются ЦП и осуществляют логику
работы согласно заложенной программы. Структурная схема контроллера
показана на рисунке 1.2.
Рисунок 1.2 – Структурная схема контроллера.
•ВХОДЫ обеспечивают
связь с внешними устройствами. Физически существуют и получают сигналы
от выключателей, датчиков, и т.д. Различают аналоговые и цифровые входы,
предназначенные для работы с аналоговыми и цифровыми сигналами
соответственно.
•ЦП – «мозг»
ПЛК, осуществляющий логику работы системы. Это процессор, обрабатывающий
команды программы и управляющий всеми внутренними элементами
контроллера: входами, выходами, счетчиками, таймерами, внутренними
реле, регистрами и т.д. На рисунке 1.2 счетчики, таймеры и внутренние
реле не показаны отдельно, они входят в состав микросхемы ЦП. Т.е.
каждый контроллер обладает фиксированным набором таких элементов,
которые приводятся в спецификации.
•ВНУТРЕННИЕ РЕЛЕ
(МЕРКЕРЫ) предназначены
для обеспечения работы программы, т.к. являются своего рода единицами
хранения информации (смотри раздел 11.2 «Программирование внутреннего
реле»). Наряду с обычными меркерами существуют также и служебные
меркеры, несущие специальную смысловую и функциональную нагрузку
(например, установка разрешающего флага для запуска высокоскоростных
счетчиков). Назначение каждо-
го конкретного служебного меркера приводится в документации к
контроллеру.
•СЧЕТЧИКИ предназначены
для различного рода счета. Отдельно выделяют высокоскоростные
счетчики. Как правило, имеются ограничения на скорость счета и
значение, до которого ведется счет, для чего необходимо обращаться к
документации конкретного контроллера.
•ТАЙМЕРЫ предназначены,
как правило, для установки времени задержки включения/выключения и
т.п. Различаются в основном точностью отсчета времени и, как
следствие, назначением.
•ПАМЯТЬ –
контроллер обладает некоторым объемом памяти, которая в различных
контроллерах может иметь различную организацию. Как правило, память
делится на рабочую область (ОЗУ), куда загружается программа непосредственно во время работы контроллера, и область данных (EEPROM, MMC и
т.п), где хранится программа и различные данные. Часто объем рабочей
области измеряется в килобайтах, а объем области данных – в количестве
шагов программы.
•ВСТРОЕННЫЙ
ИНТЕРФЕЙС обеспечивает
подключение ПЛК к компьютеру или программатору для обмена данными, в том
числе и для перепрограммирования контроллера. В основном это RS-232C
(COM-port), RS-422, RS-485 и т.п.
•ВЫХОДЫ обеспечивают
связь с внешними устройствами, т.е. обеспечивают включение/ выключение
исполнительных механизмов. Существуют два варианта исполнения: релейные,
полупроводниковые (транзисторные и симисторные). Различают аналоговые
и цифровые выходы, предназначенные для работы с цифровыми и аналоговыми сигналами соответственно.
•ИСТОЧНИК
ПИТАНИЯ предназначен для
обеспечения работы контроллера. Могут использоваться внешние источники
питания, как постоянного тока +12/24 В, так и переменного – ~110/220 В.
Многие контроллеры обладают встроенными сервисными источниками питания
(обычно +12/24 В), которые используются для подачи питания на датчики
или другие устройства, подключенные к контроллеру для упрощения
входных и выходных цепей..
Последнее время имеется тенденция к расширению функциональных
возможностей контроллеров за счет реализации встроенных ПИД-регуляторов,
часов реального времени, объединения контроллеров в сеть и
использования возможностей подключения блоков расширения. В любом случае
структура контроллера остается неизменной, и выбор модели определяется
только требованиями технологического процесса, а широкий ряд моделей
позволяет подобрать контроллер с оптимальным соотношением
цена/производительность. Вопросы, связанные с выбором контроллера
рассмотрены в разделе 6 «Вопрос выбора ПЛК».
Для понимания работы контроллера на рисунке 1.3 приведен алгоритм его
работы.
Рисунок 1.3 – Схема алгоритма работы контроллера.
В процессе работы ПЛК непрерывно опрашивает текущее состояние входов
X1, X2…Xn и в соответствии с требованиями производственного процесса
изменяет состояние выходов Y1, Y2…Yn (вкл./выкл). Можно разделить этот
цикл на четыре основных шага.
Шаг первый – инициализация системы. Необходимо помнить, что в случае
сбоев по питанию или при выключении контроллера система обязана
вернуться в исходное состояние. Не следует недооценивать важности этой
части программного кода, так как в противном случае это может привести
к сбоям и поломкам оборудования.
Шаг второй – проверка текущего состояния входов. ПЛК проверяет текущее
состояние входов и в зависимости от их состояния («вкл». или «выкл.»)
выполняет последовательные действия, указанные в программе. Состояние
любого из входов сохраняется в памяти (в области данных) и может в
дальнейшем использоваться при обработке третьего шага программы.
Шаг третий – выполнение программы. Будем считать, что в ходе
технологического процесса переключился вход (Х1) с «выключено» на
«включено», и в соответствии с технологическим процессом нам
необходимо изменить текущее состояние выхода (Y1) с
«выключено» на «включено». Так как ЦП опросил текущее состояния всех
входов и хранит их текущее состояние в памяти, то выбор последующего
действия обусловлен только ходом технологического процесса.
Шаг четвертый – изменение текущего состояния выхода. ПЛК изменяет
текущее состояние выходов в зависимости от того, какие входы являются
выключенными, а какие включенными, исходя из алгоритма записанной в
память программы, которая была отработана на третьем шаге. То есть
контроллер, физически переключил выход (Y1) и
включились исполнительные механизмы: лампочка, двигатель и т.д. После
этого следует возврат на второй шаг.
2 Классификация контроллеров
Как правило, ПЛК объединяет в себе базовый блок и широкий спектр модулей
расширения, позволяющих сконфигурировать оптимальную систему непосредственно
под каждую конкретную задачу. В зависимости от данной задачи можно выбрать как
небольшие и недорогие не наращиваемые контроллеры (которые не поддерживают
подключение модулей расширения), так и масштабируемые решения с возможностью
подключения дополнительных модулей с обширным набором возможностей. Невозможно
сказать, какой из контроллеров лучше, а какой хуже; широкий ряд контроллеров
позволяет решать задачи с оптимальным соотношением ценапроизводительность, и
выбор конкретной модели определяется только требованиями, которые
предъявляются решаемой задачей (память, быстродействие, возможность
расширения, необходимость создания сети).
Мощное вычислительное ядро современных ПЛК делает их очень похожими на
компьютеры. Однако ПЛК это не «железо», а технология. Она включает специфическую
аппаратную архитектуру, принцип циклической работы и специализированные языки
программирования. Программирование ПЛК осуществляется людьми, хорошо знающими
прикладную область, но не обязанными быть специалистами в математике и
программировании.
В настоящее время в промышленности используется несколько типов логических
контроллеров.
«точка-точка» (peer-to-peer) с другой аппаратурой и интерфейсы, связывающие
отдельные устройства через сеть с другими средствами автоматизации. В
контроллер встраивается или подключается к нему специальная панель
интерфейса для оператора, состоящая из алфавитно-цифрового дисплея и набора
функциональных клавиш.
В этом классе следует выделить специальный тип локальных контроллеров,
предназначенных для систем противоаварийной защиты. Такие устройства
отличаются особенно высокой надежностью и быстродействием. В них
предусматриваются различные варианты полной текущей диагностики
неисправностей, вплоть до диагностики неисправностей каждой отдельной
платы; защитные коды, предохраняющие информацию от искажений во время
передачи и хранения; резервирование как отдельных компонентов, так и всего
устройства в целом.
Контроллеры, предназначенные для цепей противоаварийной защиты, должны иметь
специальный сертификат, подтверждающий их высокую надежность и устойчивость
к внешним воздействиям.
Сетевые решения на базе ПЛК наиболее широко применяются для управления
производственными процессами во всех отраслях промышленности. Минимальный
состав данного класса ПТК подразумевает наличие следующих компонентов:
− набор контроллеров;
− несколько дисплейных рабочих станций операторов;
− системную (промышленную) сеть, соединяющую контроллеры между собой и
контроллеры с рабочими станциями.
Контроллеры каждого сетевого комплекса, как правило, имеют ряд
модификаций, отличающихся друг от друга быстродействием, объемом памяти,
возможностями по резервированию, способностью работать в разных условиях
окружающей среды, числом каналов входа/выхода. Так что можно подобрать
контроллер для каждого узла автоматизируемого агрегата с учетом особенностей
и выполняемых функций последнего и использовать один и тот же комплекс для
управления разными производственными объектами.
Следует выделить телемеханический тип сетевого комплекса контроллеров,
предназначенный для автоматизации объектов, распределенных по большой
области пространства.
Системная сеть с характерной структурой и особые физические каналы связи
(радиоканалы, выделенные телефонные линии, оптоволоконные кабели) позволяют
интегрировать узлы объекта, отстоящие друг от друга на многие десятки
километров, в единую систему автоматизации.
Рассматриваемый класс сетевых комплексов контроллеров имеет верхние
ограничения как по сложности выполняемых функций, так и по объему
автоматизируемого объекта. Обычно телемеханические комплексы решают
типовые задачи измерения, контроля, учета, регулирования и блокировки,
учитывая до нескольких десятков тысяч измеряемых и контролируемых величин.
Чаще всего сетевые комплексы применяются на уровне цехов машиностроительных
заводов, агрегатов нефтеперерабатывающих, нефтехимических и химических
производств (правда, не самых мощных), а также цехов предприятий пищевой
промышленности. Телемеханические сетевые комплексы контроллеров используются
для управления газои нефтепроводами, электрическими сетями, транспортными
системами.
Маломасштабные распределенные контроллерные средства в среднем превосходят
большинство сетевых комплексов контроллеров по мощности и гибкости
структуры, а следовательно, по объему и сложности выполняемых функций. В
целом, этот класс еще имеет ряд ограничений по объему автоматизируемого
производства и набору реализуемых функций. Однако данная категория средств
отличается от предшествующего класса тем, что имеет развитую многоуровневую сетевую структуру. Так, нижний уровень может выполнять связь
контроллеров и рабочей станции компактно расположенного технологического
узла, а верхний уровень поддерживать взаимодействие нескольких узлов друг с
другом и с рабочей станцией диспетчера всего автоматизируемого участка
производства. На верхнем уровне (уровне рабочих станций операторов) эти
комплексы, по большей части, имеют достаточно развитую информационную
сеть. В некоторых случаях расширение сетевой структуры идет в направлении
применения стандартных цифровых полевых сетей, соединяющих отдельные
контроллеры с удаленными от них блоками ввода/вывода и интеллектуальными
приборами. Подобная простая и дешевая сеть соединяет по одной витой паре
проводов контроллер с множеством интеллектуальных полевых (заводских)
приборов, что резко сокращает длину кабельных сетей на предприятии и
уменьшает влияние возможных помех, поскольку исключается передача низковольтной аналоговой информации на значительные расстояния.
Мощность контроллеров, применяемых в этом классе средств, позволяет в
дополнение к типовым функциям контроля и управления реализовывать более
сложные и объемные алгоритмы управления (например, самонастройку алгоритмов
регулирования, адаптивное управление).
Маломасштабные распределенные системы управления используются для
автоматизации отдельных средних и крупных агрегатов предприятий
непрерывных отраслей промышленности, а также цехов и участков дискретных
производств и цехов заводов черной и цветной металлургии.
Это наиболее мощный по возможностям и охвату производства класс
контроллерных средств, практически не имеющий границ ни по выполняемым на
производстве функциям, ни по объему авто-
матизируемого производственного объекта. Нередки примеры использования
одной такой системы для автоматизации производственной деятельности целого
крупномасштабного предприятия.
Описываемая группа контроллерных средств отличается:
− развитой многоуровневой структурой, предусматривающей выделение трех
уровней: информационного, системного и полевого, причем для организации
отдельных уровней могут использоваться разные варианты построения сетей;
− клиент-серверным режимом работы;
− выходом на корпоративную сеть предприятия, систему управления
бизнес-процессами, глобальную сеть Интернет, а также на уровень
интеллектуальных приборов;
− широким модельным рядом применяемых контроллеров, различающихся по числу
входов/выходов, быстродействию, объему памяти разного типа, возможностям по
резервированию, наличию встроенных и удаленных интеллектуальных блоков
ввода/вывода на все виды аналоговых и дискретных сигналов;
− широким диапазоном рабочих станций;
− мощным современным программным обеспечением, в состав которого входят:
а) интерфейсы операторов с системой управления, предусматривающие
различные варианты построения на разных уровнях управления;
б) набор технологических языков с объемными библиотеками типовых программных
модулей для решения задач контроля, логического управления и
регулирования;
в) универсальные прикладные пакеты программ, реализующие типовые функции
управления отдельными агрегатами, диспетчерское управление участками
производства, технический учет и планирование производства в целом,
г) системы автоматизированного проектирования и конструкторского
документооборота для разработки системы автоматизации.
Полномасштабные распределенные системы управления устанавливаются на
электростанциях, крупных агрегатах типа «котелтурбина»,
нефтеперерабатывающих заводах для управления крекингпроцессами, охватывают
все производство на химических и нефтехимических заводах и т. д.
К перечисленным выше видам контроллеров можно добавить также то, что
существуют программы, имитирующие работу ПЛК на компьютере, так называемые
SoftPLC (программные ПЛК). В этом
случае, удается совместить на одной машине контроллер, средства
программирования и визуализации. Недостатком такого решения является
значительное время восстановления при сбоях и повреждениях. Перезагрузка
операционной системы (ОС) и запуск прикладной задачи может занимать
несколько минут. Переустановка и настройка ОС, драйверов оборудования и
прикладных программ требует значительного времени и высокой квалификации
обслуживающего персонала, тогда как системное программное обеспечение ПЛК
расположено в постоянной памяти в адресном пространстве центрального
процессора и всегда готово к работе. По включению питания, ПЛК готов взять
на себя управление системой уже через несколько миллисекунд.
содержание ..
1
2
3
4
5
6
.. zinref.ru Представлена на рис. 1. БПР представляет собой адресный компаратор, предназначенный для формирования сигналов прерывания как в сторону ИК1, так и в сторону МКП при обращении к ячейке с фиксированным адресом (в контроллере задан жестко.) МКП представляет собой однокристальное 8-разрядное параллельное центральное процессорное устройство с фиксированной системой команд. СНХ представляет собой генератор, формирующий неперекрывающиеся импульсы фаз с амплитудой 12 В и импульсы частотой 764 кГц для ЭПС. УСП представляет собой двухпортовое ОЗУ с арбитром, организующим асинхронный доступ со стороны МКП и интерфейса ИК1. ДШ предназначен для организации поочередной выборки микропроцессором МКП устройств ввода-вывода, УСП, ПЗУ, а также формированиясигнала готовности микропроцессору при обращении к УСП. ПЗУ предназначено для хранения программы функционирования и диагностики контроллера. УВВ осуществляет синхронный обмен данными с ЭПС. 4.2. Устройства, входящие в состав контроллера, объединенывнутренней магистралью, сигналы которой формируются МКП. Шины управления (ШУ) включают в себя сигналы ПРИЕМ (ПРМ) и ЗАПИСЬ (ЗАЛ), управляющие направлением движения информации, по шинам данных (ШД).16-ти разрядная шина адреса (ША) предназначена для организации выборкиустройств контроллера при обмене информацией с МКП. Формат адресныхслов МКП для выбора устройств контроллера приведен на рис. 2. 4.3. Работа контроллера определяется архитектурными особенностями обращения к нему со стороны интерфейса ИKI. 4.3.1. Со стороны ИК1 контроллер представляет собой оперативно-запоминающее устройство емкостью 1024 байта. Формат адресного слова при обращении и распределений ячеек памяти контроллера приведены на рис. 3. По функциональному назначению память распределен на четыре зоны. Первая зона является служебной и предназначена для организации синхронной работы контроллера по интерфейсу ЙК1. Вторая зона предназначена для хранения массива передаваемой информации в линию связи. Третья зона предназначена для хранения принимаемого массива информации из линии связи. Четвертая зона памяти является специальной и обращение к ней со стороны интерфейса ИК1 запрещено, за исключением, ячеек База +300Н, Баэа +301H. 4.3.2. Общая структура организации канала связи с использованием контроллера приведена на рис. 4. Процесс обмена для элемента управления реализуется по принципу «память-память». Элемент yправления формирует массив передачи и определяет начало цикла приема-передачи через служебную зону. Контроллер независимо от элемента управления организует формирование протокола данных и передает массив в линию связи. Признаки завершения цикла обмена формируются контроллером и запоминаются в служебной зоне после чего возможен доступ к принятому массиву со стороны ИК1. 4.3.3. На рис. 5 представлены протоколы обмена информацией контроллера, работающего на выделенный телефонный канал с использованием ЭПС. Обмен информацией организован в синхронном режиме. Ввиду использования полудуплексного режима передачи, контроллеры, подключенные к противоположным концам радиальной линии связи, разделяются на «ведущий» и «ведомый». «Ведущий» всегда является инициатором приема-передачи по команде со стороны ИК1. «Ведомый» всегда находится в режиме отслеживания и исполнения команд от «Ведущего». Признаком определяющим работу контроллера в режиме «Ведущий» или «Ведомый» является содержимое ячейки База +301H. 4.3.4. Начало выполнения каждой команды осуществляется в загрузке в «ведущий» контроллер командного слова. В зависимости от кода команды реализуется один из трех протоколов. При выполнении команды «Чтение» за кодом команды следует и адрес запрашиваемого массива информации. «Ведомый» контроллер после приема этой посылки, формирует CСK, ССКИ и сигнал ЗПР. Элемент управления на стороне «ведомого» контроллера выдаёт сигнал ЗПР и в соответствии с длиной и адресом организуется перезапись массива с основной памяти в буфер контроллера. «Ведомый» контроллер передает полученный массив о подтвержденным кодом длиной и адресом массива. «Ведущий» контроллер, приняв послание ответа, формирует и передает посылку квитанции, в которой сообщает о правильности прохождения всего цикла обмена, а также формируетССК, ССКИ и сигнал ЗПР. При выполнении команды «Запись» за кодом команды следует адрес записываемого массива и массив информации. «Ведомый»после приема этой посылки, передает посылку ответа, включающуюпринятый адрес и длину массива. «Ведущий», приняв посылку ответпередаёт посылку квитанцию, в которой указывает о правильностипрохождения всего цикла обмена и формирует ССК и ССКИ. Причтении квитанции правильности обмена «ведомой» формируй ССК и ССКИ и сигнал ЗПР. Обмен информацией осуществляется командами «Запись» и «Чтение». Получение информации о состоянии «ведомого» по завершении цикла обмена реализуется командой «Опрос слова состояния». Циклы обмена информацией при выполнении команд осуществляются по асинхронному принципу - посылка запроса, ответа и квитанции. Формат посылок начинается с символа синхронизации (СНХ) и заканчивается символом конца передачи (КП). В посылках запроса и ответа за СНХ следует код выполняемой команды. Синхронизация обмена осуществляется через ячейки памяти служебной зоны, адреса и форматы которых для «ведущего» приведены на рис.6, а для «ведомого» на рис. 7. Назначение ячеек «ведущего» контроллера и разрядов этих ячеек, а также порядок изменения их состояния следующий: ячейка База + 0 - слово состояния контроллера; 0 разряд – «готовность». Устанавливается контроллером после исполнения команды. Сбрасывается контроллером перед выполнением команды. 3,5,7 разряды – «ошибки». Устанавливаются контроллером во время исполнения команды при обнаружении ошибок. Сбрасывается контроллером перед выполнением каждой команды или элементом управления после их обработки. Ячейка База +I - слово состояния контроллера инициативное! 7 разряд – «команда исполнения» Устанавливается контроллером при исполнении команды при работе без маски, при этом формируется сигнал ЗПР на интерфейс ИК1, Сбрасывается элементом управления после обработки этого признака (при чтении этой ячейки со стороны ЙК1 сигнал ЗПР сбрасывается). Ячейка База +3 - командное слово контроллеру. Загружается ЗУ для запуска контроллера на исполнение команды. Ячейка База +300Н - управляющее слово контроллеру, определяетрежим работы контроллера. Запись в данную ячейку слова 84 Н задает контроллеру режим «ведущий», а МКП сигнал «установка» УСТ. Запись слова 00H задает контроллеру режим «ведомый» а МКП сигнал УСТ. Ячейка База +301Н— маркер теста. При записи в ячейку слова 00Н. запускается программа диагностики контроллера. Назначение ячеек «ведомого» контроллера и разрядов этих ячеек, а также порядок изменения их состояния следующее: ячейка Ваза +0 слово состояния контроллера; 0 разряд - «готовность» Устанавливается контроллером после получения команды от «задающего». Сбрасывается ЗУ после обработки этого признака. Отсутствие «готовности» в слове состояния «ведомого» для «ведущего» является готовностью «ведомого» к обмену. 1 разряд – «Запрос связи» Устанавливается при необходимости ЗУ на стороне «ведомого». Сбрасывается ЗУ на стороне «ведомого» после обработки признака на стороне «ведущего». 4..7 разряды - "ошибки" Устанавливаются контроллером при выполнении очередной команды. Сбрасываются контроллером перед выполнением команды или ЗУ после их обработки. Ячейка База +1 слово состояние контроллера инициативное 1-2 разряды – «команды». Устанавливаются контроллером при организации со стороны «ведущего» цикла обмена. При этом устанавливается сигнал ЗПР. При выполнении команды «опрос слово состояния» «ведущий» передает код команды. Приняв код команды, «ведомый» считывает собственное слово состояние (ССК) и, подтвердив код команды, передает слово состояния. «Ведущий», приняв посылку ответа, формирует и передает посылку квитанции, в которой указывает о правильности прохождения всего цикла обмена, а также формирует ССК, ССКИ и ЗПР. Дата добавления: 2015-07-16; просмотров: 107 | Нарушение авторских прав mybiblioteka.su Структурная схема (СС) управления и контроля. Назначение структурной схемы. Требования, предъявляемые к оформлению структурной схемы. Всякое управление предполагает наличие объекта управления и управляющего органа. Объекты управления чрезвычайно разнообразны: предприятия, сложная технологическая установка, отрасль народного хозяйства, живой организм или его часть, учебное заведение, город, область, республика. Управление представляет собой сложный информационный процесс. Желательно, чтобы управление осуществлялось наилучшим образом, было оптимальным. СС являются для каждого проектного объекта основным проектным документом, т.к. ими устанавливаются оптимальные каналы административно-технического и оперативного управления технологическим процессом для достижения наивысших эксплуатационных показателей. В СС управления и контроля отображаются особенности технологического характера данного производства, а также технические средства, используемые при создании локальных систем контроля и автоматизации. Рис 1. Структурная схема системы управления Благодаря, определенному взаимодействию между СУ и объектом системы автоматизации, обеспечивается требуемый результат работы объекта, который характеризуется величинами Х, т.е. это величины характеризующие целесообразность конечного продукта, отдельные параметры, определяющие ход ТП, его экономичность и обеспечение безаварийности режима работы ТП. Работа комплексного объекта автоматизации характеризуется вспомогательными параметрами У, которые должны контролироваться и регулироваться. Это величины, характеризующие работу установок, подготовки технологического пара, насосных отделений и т.д. В процессе работы на объект поступают возмущающие воздействия f, которые вызывают отклонение параметров Х от требуемых значений. Информация о текущих значения Х и У поступает в СУ и сравнивается с заданным значением g. В результате чего система управления вырабатывает управляющие воздействия е для компенсации отклонений выходного параметра. Т.о. объект автоматизации состоит из связанных друг с другом участков управления, которые могут быть представлены в виде отдельных установок или в виде локальных каналов управления отдельными параметрами одних и тех же установок. Процесс управления – это информационный процесс, заключающийся в сборе информации о ходе процесса, передаче ее в пункты накопления и переработки, анализе поступающей, накопленной и справочной информации, принятии решения на основе выполненного анализа, выработке соответствующего решения на основе выполненного анализа, выработке соответствующего управляющего воздействия и доведения его до объекта управления. Каждая фаза процесса управления протекает во взаимодействии с окружающей средой при воздействии различного рода помех. Цели, принципы и границы управления зависят от сущности решаемой задачи. Рис.2 Процесс управления как информационный процесс Система управления – совокупность взаимодействующих между собой объекта управления и органа управления, деятельность которых направлена на достижение заданной цели управления. Помехи52.Назначение, структурная схема контроллера пдп(dma). Структурная схема контроллера
Назначение и структура программируемого контроллера
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
Белорусский национальный технический университет
МЕЖДУНАРОДНЫЙ ИНСТИТУТ ДИСТАНЦИОННОГО ОБРАЗОВАНИЯ
Кафедра «Информационные системы и технологии»
Ю. Е. Лившиц В. И. Лакин Ю. И. Монич
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ ДЛЯ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ
ПРОЦЕССАМИ
Минск БНТУ 2014
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ КОНТРОЛЛЕРЫ ДЛЯ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ
ПРОЦЕССАМИ
Оглавление
АППАРАТНАЯ ЧАСТЬ КОНТРОЛЛЕРА
Глава 1. Общие сведения. Введение в ПЛК
Встроенный,
являющийся неотъемлемой частью агрегата, машины, прибора. Такой контроллер
может управлять станком с ЧПУ, современным интеллектуальным аналитическим
прибором, автомашинистом и другим оборудованием. Выпускается на раме без
специального кожуха, поскольку монтируется в общий корпус оборудования.
Такой контроллер может быть как однокристальным, так и представлять собой
набор плат и интегральных схем без собственного корпуса.
Автономный модуль,
реализующий функции контроля и управления небольшим изолированным
технологическим узлом, как, например, районные котельные, электрические
подстанции, резервуарные парки. Автономные контроллеры помещаются в
защитные корпуса, рассчитанные на разные условия окружающей среды. Почти
всегда эти контроллеры имеют порты для соединения в режиме
Сетевой комплекс контроллеров (PLC, Network).
Распределенные маломасштабные системы управления (DCS, Smaller Scale).
Полномасштабные распределенные системы управления (DCS, Full Scale).
Структурная схема контроллера
Структурная
Рис.3 Система управления как совокупность объектов.
Задачи, решаемые системой управления. В СУ решаются четыре основные задачи управления: стабилизация, выполнение программы, слежение, оптимизация.
Задачами стабилизации системы являются задачи поддержания ее выходных величин вблизи некоторых неизменных заданных значений, несмотря на действие помех.
Задача выполнения программы возникает в случаях, когда заданные значения управляемых величин изменяются во времени заранее известным образом.
В тех случаях, когда изменение заданных значений управляемых величин заранее неизвестно и когда эти величины должны изменяться в зависимости от значений других величин, возникает задача слежения, т.е. как можно более точного соблюдения соответствия между текущим состоянием данной системы и состоянием другой системы.
В системах оптимального управления требуется наилучшим образом выполнить поставленную перед системой задачу при заданных реальных условиях и ограничениях. Понятие оптимальности должно быть конкретизировано для каждого отдельного случая.
Особенности сложной системы часто приводят к тому, что цель управления таким объектом в полной мере никогда не достигается, как бы совершенно ни было управление.
В зависимости от уровня автоматизации СС подразделяются:
1. Система централизованного управления и контроля (функции управления осуществляет оператор и применяет средства централизованного сбора информации, и ее частичной переработки).
2. Система децентрализованного (локального) управления и контроля (функции управления осуществляет оператор).
3. Автоматизированные системы управления (функции управления остаются за оператором, применяется ВТ для обработки информации и подготовки ее оператору для принятия решения).
4. Автоматические системы управления (оператор осуществляет функции контроля над системой).
Системы управления делятся на два больших класса: системы автоматического управления (САУ) и автоматизированные системы управления (АСУ). В САУ управление объектом или системой осуществляется без непосредственного участия человека автоматическими устройствами. Это замкнуты системы. Основные функции САУ: автоматический контроль и измерения, автоматическая сигнализация, автоматическая защита, автоматические пуск и остановка различных двигателей и приводов, автоматическое поддержание заданных режимов работы оборудования, автоматическое регулирование. В отличие от САУ в АСУ в сферу управления включен человек, на которого возлагаются функции принятия наиболее важных решений и ответственности за принятые решения. Под АСУ обычно понимают человеко-машинные системы, использующие современные экономико-математические методы, средства электронно-вычислительной техники (ЭВТ) и связи, а также новые организационные принципы для отыскания и реализации на практике наиболее эффективного управления объектом (системой).
В соответствии с общепринятым представлением под автоматизированной системой понимается «человеко-машинная система, обеспечивающая автоматизированный сбор и обработку информации, необходимой для оптимизации управления в любых сферах человеческой деятельности». В автоматических системах функции человека сводятся к разработке, отладке и контролю системы. Само же управление осуществляется без участия человека. В автоматизированных системах наличие человека (коллектива людей) в контуре управления является принципиальным. Человек ( коллектив людей) является главным определяющим звеном системы управления, поскольку он принимает решения и несет за них всю ответственность – в этом принципиальная разница между автоматическими и автоматизированными системами.
Централизованный вид управления предполагает реализацию всех процессов управления объектами в едином центральном органе управления. Этот орган собирает информацию о состоянии всех объектов управления, осуществляет ее обработку и каждому объекту управления выдает свою собственную управляющую команду. Управляющий орган воздействует на объект управления посредством выдачи команд. Эту информацию называют распорядительной. Поскольку органу управления не безразлично поведение объекта управления, всегда присутствует обратная связь – это осведомительная информация. Она сообщает органу управления о состоянии объекта управления.
Достоинства такой структуры:
-- создается принципиальная возможность реализации
глобально-оптимального управления системой в целом,
поскольку каждое управляющее воздействие
вырабатывается на основе всей информации о системе;
-- достаточно просто реализуются процессы
информационного взаимодействия ;
Рис.4Централизованная
структура управления
-- исключается необходимость в пересылках
промежуточных результатов процессов управления;
-- легко осуществляется корректировка оперативно изменяющихся данных;
-- возникает возможность достижения максимальной эксплуатационной
эффективности при минимальной избыточности технических средств.
Недостатки такой структуры:
-- необходимость для органа управления собирать, запоминать и обрабатывать чрезвычайно большие объемы информации;
--необходимость наличия запоминающих устройств очень большого объема;
-- необходимость использования вычислительных средств очень высокой
производительности;
-- чрезвычайно высокие требования по надежности ко всем элементам технического обеспечения и ко всем элементам программного обеспечения, потому что выход из строя любого элемента приводит к выходу из строя всей системы;
--высокая суммарная протяженность и перегруженность каналов связи при наличии территориально разнесенных объектов управления.
В централизованном виде управления существует еще одна разновидность управления – так называемая централизованная рассредоточенная структура.
В рассматриваемой структуре сохраняются все свойства и особенности принципа централизованного управления, а именно: выработка управляющего воздействия на каждый объект управления осуществляется на основе информации о состоянии всей совокупности объектов управления. Однако в отличие от полностью централизованной структуры она не имеет четкой локализации в едином управляющем органе.
Алгоритмы управления в этом случае состоят из совокупности взаимосвязанных алгоритмов управления объектами.
В процессе функционирования каждый управляющий орган производит прием и обработку соответствующей информации, а также выдачу управляющих команд на подчиненные объекты. Кроме того, каждый локальный орган управления по мере необходимости вступает в процесс информационного взаимодействия с другими органами управления.
Достоинства такой структуры:
-- Снижение требований к объемам памяти, производительности и надежности каждого управляющего органа без снижения качества управления;
-- Суммарная протяженность и стоимость каналов связи в такой системе может быть снижена.
Недостатки такой структуры:
-- усложненность информационных процессов вследствие необходимости обмена данными между центрами обработки;
-- сложность корректировки хранимой в памяти системы информации;
-- значительная избыточность технических средств, следовательно, повышение расходов на их приобретение, монтаж и эксплуатацию;
-- сложность синхронизации процессов обмена информацией.
Рис .5 Централизованная рассредоточенная структура
Децентрализованное управление предполагает распределение функций управления по отдельным элементам сложности системы.
Построение системы с такой структурой возможно только в случае независимости объектов управления по материальным, энергетическим, информационным и иным ресурсам. Для выработки управляющего воздействия на каждый объект необходима информация только о состоянии этого объекта и безразлична информация о состоянии других объектов.
Фактически централизованная рассредоточенная структура представляет собой совокупность нескольких независимых систем, каждая из которых обладает своей информационной, алгоритмической, технической и прочими базами.
Децентрализованное управление свободно от многих недостатков чисто централизованного управления. Однако по сравнению с централизованными управлением у децентрализованного управления имеются очевидные недостатки.
Недостатки:
-возможная разность управления при одинаковых объектах управления;
-- высокая стоимость системы управления;
-- сокращение перерабатываемой информации может привести к снижению качества управления.
Поэтому в сложных системах управления, как правило, относится к промежуточному типу, когда степень централизации находится между двумя крайними случаями чисто централизованного и децентрализованного управления.
Структурные схемы управления и контроля выполняются без соблюдения масштаба. На чертеже в обязательном порядке должна быть таблица с поясняющими надписями.
Назначение структурной схемы: определить систему управления и контроля производственными процессами и установить взаимные связи между пунктами управления, операторными рабочими постами, основными группами технологического оборудования и показать административно-техническую сущность централизованного объекта управления..
В общем случае на СС условными изображениями показывается:
-СУ, все операторные и диспетчерские пункты, щиты, входящие в структуру управления проектируемого объекта,
- диспетчерские и операторные пункты управления, которые не входят в состав разрабатываемого проекта, но связаны с ним системами контроля и управления
- цеха проектируемого объекта с разделением на отделения, участки и т.д. с указанием операторских рабочих постов,
-линии тех. потоков между отделения, участками,
- линии связи с указаниями на них буквенного обозначения вида операторной связи.
Функции станции оператора:
- автоматически или по вызову отображать информацию о ходе технологического процесса на обзорных и групповых видеокадрах, мнемосхемах технологических агрегатов, графиков изменения технологических переменных во времени (трендов), экранных панелях предупредительной и аварийной сигнализации;
- световой и звуковой сигнализации нарушений технологического процесса и отказов технических средств систем;
- формирование и вывод сменной ведомости параметров, отклонившихся за уставки предупредительной сигнализации;
- формирование и вывод сменной ведомости времени работы механизмов;
- санкционирование доступа к функциям системы с помощью паролей;
- архивирования информации с возможностью ее последующего просмотра на внесистемном компьютере, создание протоколов с заранее заданной формой представления.
При этом время обновления информации на экранах мониторов не более 1с.
Инжиниринговая станция предназначается для внесения изменений в конфигурацию системы при ее совершенствовании и расширении с установленным программным обеспечением.
На уровне операторского управления (инженерной станции) обеспечивается возможность:
- программирования технологических алгоритмов;
- реализация функций дистанционного управления, защит и блокировок, пошаговых программ;
- формирование единой базы данных проекта;
- конфигурирование структуры аппаратных средств;
- разработка операторского интерфейса.
studfiles.net
52.Назначение, структурная схема контроллера пдп(dma).
DMA (Direct Memory Access — «прямой доступ к памяти» — ПДП) — это механизм максимально быстрого обмена данными между периферийными устройствами и памятью микропроцессора/микроконтроллера без участия ядра процессора (CPU). Его основное назначение — выполнение «рутинной» работы параллельно с основной работой ядра процессора, для которой он, собственно, и проектировался. Такое разделение труда позволяет существенно увеличить производительность системы в целом (а в некоторых системах прирост скорости приложения с использованием DMA возрастает на порядки). А поскольку само ядро разгружается от «лишней» работы, то возникает возможность снижения частоты его тактирования и напряжения питания, что, в свою очередь, повышает экономичность системы. Обычное копирование блока данных из одного места памяти в другое выполняется контроллером DMA значительно быстрее, чем программное (пример: стандартная библиотечная функция в C-компиляторах) и при этом практически не «съедает» процессорного времени.
Упрощенно контроллер DMA можно представить как дополнительный аппаратный блок, размещенный на кристалле микропроцессора. Фактически он является автоматом состояний, управляемым внешними событиями. В относительно «простых» микропроцессорах контроллер DMA подключен к общей внутренней шине данных, являющейся мостом между всеми периферийными устройствами, внутренней или внешней памятью и ядром. В сложных и более быстродействующих процессорах для контроллера DMA чаще всего отводится отдельная шина или даже отдельная область памяти, что в значительной степени сокращает участие ядра процессора в операциях пересылки данных через DMA. Обычно (в зависимости от конкретного процессора) источниками и приемниками данных могут служить как внутренние периферийные узлы, так и внутренняя/внешняя память, причем в любом сочетании.
Как правило, контроллер DMA имеет несколько идентичных каналов, каждый из которых может быть настроен индивидуально и независимо друг от друга. В одну из задач контроллера DMA входит разделение общих ресурсов для каждого из каналов, в частности шины данных. В некоторых процессорах реализовано несколько шин данных, одна из которых предназначена исключительно для DMA. Помимо равноправного управления в некоторых процессорах доступно приоритетное управление каналами, в этом случае управление общими ресурсами, например, арбитраж шины данных определяется исходя из заранее заданного приоритета канала. Чаще всего число каналов в контроллере DMA кратно двум. Такая особенность объясняется просто: данные обычно передаются в обе стороны, то есть используется двунаправленная передача. Например, обмен по последовательному порту (USART, USB, SPI) с внешним устройством, микросхемой на плате или компьютером.
Любой контроллер DMA включает также узел управления прерываниями. Вместо его описания стоит привести один классический пример, касающийся приема непрерывного высокоскоростного потока байт данных по последовательному порту. Если в выбранном процессоре отсутствует контроллер DMA, то после приема очередного байта всякий раз необходима обработка прерывания, требующая некоторого процессорного. Все это будет работать до тех пор, пока хватает производительности ядра процессора. Но может возникнуть такая ситуация, что скорость потока поступающих данных как минимум сравняется и даже превысит скорость обработки этих данных. В этом случае придется либо увеличивать производительность процессора путем увеличения его тактовой частоты, либо вовсе заменить его на более подходящий.
Рис1.Контроллер ПДП (DMA) периферийных модулей
studfiles.net
Структурная схема управления преобразователя
Управляющее устройство (УУ) предназначено для формирования импульсов включения силовых транзисторных ключей. В настоящее время ключевые элементы преобразователя выполняются на биполярных и МОП транзисторах с изолированным затвором. Это обусловлено высокой скоростью их переключения, устойчивостью к скорости нарастания напряжения на закрытом приборе, способностью к пиковым перегрузкам по току и широкой области безопасной работы ключа. Для эффективного управления силовыми транзисторами разработаны семейства интегральных драйверов. Это специализированные микросхемы, например TL493/4/5, 1133ЕУ; 1114ЕУ; 1156ЕУ и т.д. Общим для данных микросхем является использование широтно-импульсной модуляции для регулирования выходного напряжения. При подключении микросхемы необходимо организовать контур обратной связи по напряжению (или току) для его стабилизации.
На рисунках 2.14 показаны упрощенные функциональные схемы управления для одно- и двухтактных преобразователей. Схемы содержат: генератор пилообразного напряжения G, усилитель сигнала ошибки (У), источник опорного напряжения (ИОН), компаратор (ШИМ), делитель напряжения обратной связи (R1, R2).
Если на вход делителя подать выходное напряжение U0, то часть его
Uос =U0 R2/(R1+R2) воздействует на прямой вход ОУ. Выходной сигнал ОУ определяется разностью напряжений Uос и Uион и коэффициентом усиления ОУ
Uу = UОС Ку = (U0 R2/(R1+R2) - Uион) Ку.
Так как на входе компаратора (ШИМ) действуют два сигнала, то на интервале превышения пилообразного над напряжением U на выходе компаратора образуются импульсы прямоугольной формы, длительность которых зависит от величины UОС.
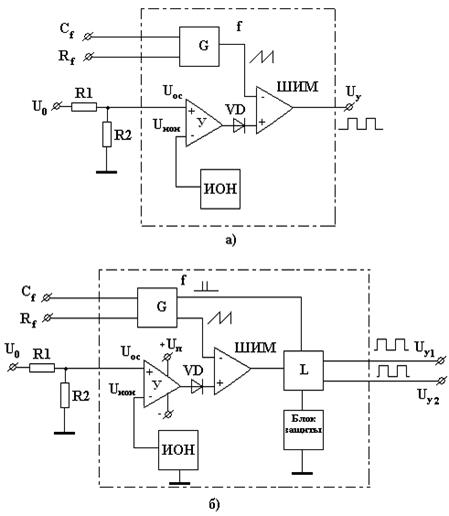
Рисунок 2.14 – Функциональная схема устройства управления
а) однотактным преобразователем; б) двухтактным преобразователем
Особенностью двухтактных схем управления является необходимость разделения последовательности импульсов с выхода компаратора на две, для поочередного управления ключами преобразователя. Для этой цели тактовые импульсы поступают на логическое устройство (L), осуществляющее распределение импульсов по силовым ключам.
Для расширения функциональных возможностей схемы могут содержать ряд дополнительных элементов. К ним относятся пороговые элементы для защиты по току и от превышения (понижения) напряжения и т.д. (блок защиты).
Элементы схемы, объединенные штрих пунктиром выполняются в одном корпусе специализированной микросхемы.
Похожие статьи:
poznayka.org
Разработка аппаратной части контроллера. Обоснование структурной схемы устройства. Структурная схема проектируемого контроллера
Порты с 16 по 19 (выходы дешифратора 1-4) служат для подключения входов разрешения регистров. 19 адрес в принципиальной схеме не используется, но для удобства он присутствует в таблице, так как А0 и А1 на следующем адресе равны нулю, что позволяет применить последующие адреса (выводы микросхемы) для управления интерфейсным блоком на основе КР580ВВ55А.
Таблица 2 –Адресное пространство для внешних устройств
|
Подключаемое внешнее устройство |
Адрес |
Разряды адресной шины |
||||||||
|
<10> |
<16> |
А7 |
А6 |
А5 |
А4 |
А3 |
А2 |
А1 |
А0 |
|
|
Индикация (RG1) DD10 |
16 |
10 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
|
Индикация (RG2) DD11 |
17 |
11 |
0 |
0 |
1 |
0 |
0 |
0 |
0 |
1 |
|
АЦП (RG3) DD12 |
18 |
12 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
|
- |
19 |
13 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
1 |
|
Порт А DD9 |
20 |
14 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
0 |
|
Порт В DD9 |
21 |
15 |
0 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
|
Порт С DD9 |
22 |
16 |
0 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
|
Регистр шин DD9 |
23 |
17 |
0 |
0 |
1 |
0 |
0 |
1 |
1 |
1 |
|
– |
- |
- |
- |
- |
- |
- |
- |
- |
- |
- |
|
– |
31 |
1F |
0 |
0 |
0 |
1 |
0 |
1 |
0 |
1 |
1.6 Блок ввода аналоговых данных
Задача блока ввода аналоговых данных (БВВАД) согласно техническому заданию - обеспечить периодическое преобразование входных аналоговых данных в цифровой код, а также передачу его в микропроцессорный блок.
Целесообразным является построение БВВАД по последовательной схеме, состоящей из аналогового коммутатора (АК) (DA1) и аналого-цифрового преобразователя (АЦП). Структура БВВАД и его интерфейса зависит от типа АЦП и АК, поэтому сначала необходимо выбрать АЦП.
Согласно техническому заданию, максимально допустимое время преобразования в АЦП должно быть не более:
t < T/(P+1) = 990/(11+1) = 82,5 мкс;
Одновременно с этим должна обеспечиваться заданная точность преобразования, определяющая разрядность АЦП:
N > – log2 d = – log2(0.005) = 7,64 » 8;
Требуемую скорость и разрядность может обеспечить АЦП К1113ПВ1 (DA3), имеющий характеристики:
- время преобразования 30 мкс;
- разрядность выходного кода – 10;
- допустимое изменение входного аналогового сигнала 0-10В
АЦП имеет по выходу Z-состояние, что облегчает его согласование в ряде случаев с системной шиной микропроцессорных систем; включается в восьмиразрядном режиме с внутренней синхронизацией.
Микросхема имеет два общих провода – «аналоговая» земля и «цифровая» земля для предотвращения импульсных наводок на входные аналоговые устройства. Вход LZ управляет допустимым диапазоном изменения аналогового сигнала на входе AIN АЦП. Если вход LZ присоединен к «аналоговой» земле (выводу GRDA), то диапазон АЦП равен 0-10В. Если LZ никуда не подключен, то диапазон составляет -5 - +5В. Преобразование аналогового сигнала в цифровой код начинается при подаче на вход STR напряжения низкого уровня. После окончания преобразования аналогово-цифровым преобразователем на выводе готовности RDY формируется сигнал низкого уровня, а на цифровых выходах D0-D9 появляется цифровой код, соответствующий уровню входного сигнала. После перехода сигнала на входе STR в состояние «логической единицы» снимается сигнал готовности, и цифровые выходы переводятся в Z-состояние.
Для преобразования аналогового сигнала каждого из 11 датчиков применяется аналоговый коммутатор К591КН1 с 16 аналоговыми входами (DА1). Канал коммутатора задаётся четырёхразрядным адресом. Перебор адресов производится выходами PА(0-3) параллельного интерфейса (DD14).
Для связи АК с АЦП применяется операционный усилитель К140УД6 (DA2). Так как напряжение аналогового сигнала (5В) меньше допустимого входного напряжения АЦП (10 В), для увеличения точности преобразования, этот операционный усилитель включается в режиме прямого усиления. Для этого производится расчет элементов обвязки ОУ. R6 стандартный для микросхем этого типа и он равен 10кОм (предназначен для компенсации дрейфа нуля). Коэффициент усиления по напряжению должен быть равен 10В/6В=1.67, он находится по формуле K=1+R4/R5, R4 выбирается равным 4кОм (по характеристикам ОУ), тогда R5 = 6.1кОм.
1.7 Блок отображения информации и блок вывода результата
Для отображения результата вычислений применяются семисегментные знакосинтезирующие индикаторы АЛС324А (HG1 – HG3). Количество разрядов отображаемого десятичного числа определяется разрядностью данных. Так при разрядности данных равной 8 количество индикаторов должно быть равным 3, так как семиразрядное число может принимать значения 0 – 28 = 256. Для преобразования двоичного кода в код индикатора применяются дешифраторы К514ИД1 (DD13 – DD15). Код результата записывается в буферные регистры (DD10, DD11), сохраняющие код до следующей записи. В регистры записывается двоично-десятичный код.
Для преобразования результата из двоичного цифрового вида в аналоговую форму применяем цифро-аналоговый преобразователь КР572ПА1А (DА4). В цепь ЦАП входит операционный усилитель, который и организует связь с ЦАП. Входы ЦАП D2 – D9 подключаются к выходам Q0 – Q7 буферного регистра
vunivere.ru
3.1 Разработка структурной схемы. Создание системы Internet управления на базе микроконтроллера
Похожие главы из других работ:
Автоматизированная система построения лабиринта и поиска выхода из него
2.1 Разработка структурной схемы
Как следует из определения, отличительным (главным свойством) системы является ее целостность: комплекс объектов, рассматриваемых в качестве системы, должен обладать общими свойствами и поведением. Очевидно...
Вариатор скорости вращения асинхронного двигателя
2 Разработка структурной схемы
Структурная схема замкнутой системы строится следующим образом. Электропривод с асинхронным двигателем управляется от тиристорного регулятора. С целью контроля температуры корпуса двигателя будет использоваться датчик температуры...
Микропроцессорная система сбора и обработки сигналов
2. Разработка структурной схемы
Структурная схема представляет собой соединение и модификация типовой микропроцессорной системы с учетом особенностей конкретных элементов этой структуры. Рисунок 2...
Модель генератора последовательности случайных чисел
3.1 Разработка структурной схемы
Сообщения от датчиков сигналов поступают в канал, где они буферизируются и предварительно обрабатываются перед обработкой на ЭВМ. Если ЭВМ находится в активном состоянии (не сломана) и не занята обработкой...
Модуль ввода/вывода аналоговых, дискретных и цифровых сигналов
1. Разработка структурной схемы
Проектируемая МПСУ предназначена для сбора данных со встроенных дискретных и аналоговых входов с последующей их передачей в сеть и управления встроенными дискретными вычислительными элементами...
Программные средства защиты информации в сетях
2.3.1 Разработка структурной схемы программы
Программа условно подразделяется на блоки: · Интерфейс пользователя; · Шифрование файлов; · Шифрование сообщений; · Расшифровка файлов; · Расшифровка сообщений. Структурная схема программы представлена на рисунке 2.1. Рис. 2...
Проектирование микроконтроллера
1.2 Разработка структурной схемы
Структурная схема устройства, выбирается исходя из технического задания. Согласно техническому заданию микроконтроллер в своем составе дожжен содержать: - системную шину ISA, для управления работой микроконтроллера; - клавиатуру...
Процессор шифрования по методу Риветса
1.2 Разработка структурной схемы
Структурная схема разрабатываемого контроллера может быть представлена как совокупность функциональных блоков, соединённых между собой...
Разработка гипотетической ЭВМ
3. Разработка структурной схемы ЭВМ
Т.к. состав проектируемой ЭВМ уже определен в исходных данных, проектирование удобно будет начать с рассмотрения структурной схемы ЭВМ, а затем подробно рассмотреть ее отдельные части. Согласно заданию, ЭВМ построена на основе общей шины...
Разработка системы поддержки принятия решений для корпоративной сети
РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ
На основании анализа проведенного выше были выделены следующие функции системы. · Обнаружение устройств. · Мониторинг сети. · Хранение данных мониторинга. · Отображение данных мониторинга. · Управление отказами...
Разработка системы сбора и обработки данных
2. Разработка структурной схемы системы
Рис. 1 - Структурная схема системы сбора и обработки данных Аналоговые сигналы приходят на АЦП, которые преобразует их в 14-разрядную кодовую комбинацию. Кодовые комбинации с обоих АЦП передаются в ПЛИС...
Разработка устройства обработки информации на основе микроконтроллера ATmega8
2. разработка структурной схемы
Согласно ТЗ, в качестве устройства обработки информации будем использовать микроконтроллер (МК) ATmega8, который производится фирмой Atmel. В качестве устройства ввода информации в МК будем использовать кнопку SB0...
Разработка, монтаж, наладка комбинированного стенда с использованием интеллектуального реле "Zelio" и GSM модема
2.2 РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ СТЕНДА
Структурная схема содержит самые общие сведения об изделии, где показаны его функциональные части, их назначение и взаимосвязь. Структурная схема применяется при проектировании изделия...
Создание системы Internet управления на базе микроконтроллера
3.1 Разработка структурной схемы
Рисунок 4 - Структурная схема разрабатываемой системы В структурную схему входят следующие блоки: · Устройтва сопряжения с сетью Ethernet...
Устройство калибровки цифрового трёхосного MEMS акселерометра
4. РАЗРАБОТКА СТРУКТУРНОЙ СХЕМЫ УСТРОЙСТВА
...
prog.bobrodobro.ru










Поделиться с друзьями: