
Технические характеристики Г-31 Г32 Г-33 Г- 201 Г-202 Г-203 Г-205 Г-210 ЭГ-10 ГСД-321-6 ГСД-322-6 МГ-30-400 Напряжение питания, В 220 40(32) 220 115 127 127 220 40 40 40 36 60 55 30 115 Частота, Гц 50 500(400) 50 400 50 50 50 500 500 360 300 400 400 200 400 Полезная мощность, Вт 4,0 16(12,8) 7,0 2,0 2 1,5 1,0 3,5 8,2 10 8 15 10 5 30 Вращающий момент •104, Нм 127,3 206 223 24,5 63,7 49 31,9 44,1 78 530 429 119 716 119 265 Скорость вращения, об/мин 3000 7500 (6000) 3000 8000 3000 3000 3000 7500 10000 7200 6000 8000 8000 4000 11000 Гарантийный срок службы, ч 3000 1000 5000 500 5000 5000 5000 1000 500 2000 2000 2000 600 600 500 Технические характеристики ДС -1 СРД-2 ДСД60 ДСД 1/300 ДСД2 СД-09М Напряжение питания, В 220 24 220 220 220 127/220 Частота, Гц 50 50 50 50 50 50 Полезная мощность двигателя, Вт 0,02 0,012 0,0123 6,85.10-5 0,014 Номинальный вращающий момент, Н •м 0,098 1,96.10-3 0,196 0,0687 0.028 Максимальный вращающий момент, Н•м 0,0686 0.078 Пусковой момент, Н•м 0,098 0,049 Скорость вращения, об / мин 2,0 2,0 60 1/300 2,0 3000 Гарантийный срок службы, ч: длит. 1 годЭлектродвигатель синхронный гистерезисный типа г. Гистерезисный двигатель г 31а схема подключения
Электродвигатель синхронный гистерезисный типа г
Электродвигатели синхронные
Электродвигатели постоянного тока типа дпр
| Тип элект-родви-гателя | Ско- рость враще- ния, об/ми | Мо-мент инер - ции рото-ра •108 кг·м2 | Напряжение питания, В | |||||||||
| 3,0 | 6,0 | 12,0 | 14,0 | 27,0 | ||||||||
| N,Вт | T104 Н·м. | N,Вт | T•104 Н·м. | N,Вт | T•104 Н·м. | N,Вт | T•104 Н·м. | N,Вт | T•104Н·м. | |||
| ДПР-1 | 9000 | 0,185 | 1,962 | 0,185 | 1,962 | |||||||
| 6000 | 0,123 | 0,123 | ||||||||||
| 4500 | 0,092 | — | — | |||||||||
| 2500 | 0,051 | — | — | |||||||||
| ДПР-2 | 9000 | 7,0 | 0,74 | 7,848 | 0,924 | 9,81 | 0,924 | 9,81 | ||||
| 6000 | 0,493 | 0,616 | 0,616 | |||||||||
| 4500 | 0,37 | 0,462 | 0,462 | |||||||||
| 2500 | 0,205 | 0,257 | — | — | ||||||||
| ДПР-3 | 9000 | 20,0 | 1,387 | 14,71 | 1,85 | 19,62 | 1,85 | 19,62 | 1,85 | 19,62 | ||
| 6000 | 0,924 | 1,233 | 1,233 | 1,233 | ||||||||
| 4500 | 0,693 | 0,924 | 0,924 | 0,924 | ||||||||
| 2500 | 0,385 | 0,514 | 0,514 | — | — | |||||||
| ДПР-4 | 9000 | 57,0 | 3,698 | 39,24 | 4,62 | 49,05 | 4,62 | 49,05 | 4,62 | 49,05 | ||
| 6000 | 2,465 | 3,082 | 3,082 | 3,082 | ||||||||
| 4500 | 1,85 | 2,311 | 2,311 | 2,311 | ||||||||
| 2500 | 1,027 | 1,284 | 1,284 | 1,284 | ||||||||
| ДПР-5 | 9000 | 170,0 | — | — | 9,245 | 98,10 | 9,245 | 98,1 | 9,245 | 98,1 | ||
| 6000 | 4,93 | 78,48 | 6,164 | 6,164 | 6,164 | |||||||
| 4500 | 3,698 | 4,623 | 4,623 | 4,623 | ||||||||
| 2500 | 2,055 | 2,568 | 2,568 | 2,568 | ||||||||
| ДПР-6 | 9000 | 360,0 | — | — | 14,79 | 157,0 | 14,79 | 157,0 | 18,49 | 196,2 | ||
| 6000 | 9,862 | 157,0 | 12,33 | 196,2 | 12,33 | 196,2 | 12,33 | |||||
| 4500 | 7,396 | 9,25 | 9,25 | 9,25 | ||||||||
| 2500 | 4,109 | 5,136 | 5,136 | 5,136 | ||||||||
| ДПР-7 | 9000 | 780,0 | — | — | 27,74 | 284,3 | 27,73 | 294,3 | 36,98 | 392,4 | ||
| 6000 | — | — | 24,65 | 392,4 | 24,65 | 392,4 | 24,65 | |||||
| 4500 | 13,87 | 294,3 | 18,49 | 18,49 | 18,49 | |||||||
| 2500 | 10,27 | 392,4 | 10,27 | 10,27 | 10,27 | |||||||
studfiles.net
Гистерезисный электродвигатель - Большая Энциклопедия Нефти и Газа, статья, страница 1
Гистерезисный электродвигатель
Cтраница 1
Гистерезисный электродвигатель имеет выгодные пусковые характеристики по току и по моменту, не требует большого пускового тока, момент плавно нарастает. [1]
Синхронные гистерезисные электродвигатели с цилиндрическим ротором могут быть как трехфазными, так и однофазными. Статор этого типа гистерезисного двигателя неявнополюсный с пазами и распределенными в них трехфазной или двумя отдельными однофазными обмотками. Большей частью эти двигатели питаются от однофазной сети переменного тока, поэтому на статоре их помещаются две однофазные обмотки с разным числом витков; обмотки, взаимно сдвинуты по окружности статора на половину полюсного деления, Образование вращающегося магнитного поля в этом двигателе, как и в предыдущих типах, обеспечивается созданием фазного сдвига между токами этих обмоток с помощью конденсатора в цепи вспомогательной обмотки. [2]
Синхронные гистерезисные электродвигатели с цилиндрическим ротором могут быть как трехфазными, так и однофазными. Статор этого типа гистерезисного двигателя неявнополюсный с пазами и распределенными в них трехфазной или двумя отдельными однофазными обмотками. [4]
Под гистерезисным электродвигателем понимают синхронный двигатель с цилиндрическим или дисковым ротором без обмотки, вращающий момент которого в несинхронном режиме создается в основном за счет явления гистерезиса при перемагничивании материала ротора, а при синхронном вращении последнего - сцеплением постоянного поля намагниченности ротора с вращающимся полем статора. Под несинхронным режимом здесь понимают такое состояние, когда скорость вращения ротора отличается от скорости поля. [6]
Под гистерезисным электродвигателем понимается синхронный двигатель с цилиндрическим или дисковым ротором без обмотки, вращающий момент которого в асинхронном режиме создается в основном за счет явления гистерезиса при перемагничивании материала ротора, а при синхронном вращении последнего - сцеплением постоянного поля намагниченности ротора с вращающимся полем статора. [7]
В гистерезисных электродвигателях с неявнополюсным статором в основном применяются двухслойные петлевые обмотки статора с нормальным и сокращенным шагом. [8]
При подключении гистерезисного электродвигателя к сети переменного тока, обмотка статора создает вращающееся магнитное поле, которое перемагничивает активный материал ротора. Благодаря гистерезису, магнитный поток в роторе отстает от магнитодвижущей силы статора на некоторый угол х В результате возникает вращающийся электромагнитный момент, увлекающий ротор в сторону вращения поля. Электромагнитный момент постоянен для данного электродвигателя независимо от того, неподвижен ли ротор или он вращается с какой-либо скоростью, вплоть до синхронной. [10]
Ток холостого хода гистерезисного электродвигателя определяется так же, как и для асинхронных двигателей, по формулам позиций 44 - 50 двадцать третьей главы. [11]
Пусковой и вращающий моменты гистерезисного электродвигателя имеют в основном одинаковую природу и определяются величиной гистерезисных потерь в материале активного слоя ротора при его вращательном перемагничивании. [12]
Как указывалось выше, под гистерезисным электродвигателем понимается синхронный двигатель с цилиндрическим или дисковым ротором без обмотки с постоянным остаточным магнитным полем и асинхронным пуском. [13]
Как указывалось выше, под гистерезисным электродвигателем понимается синхронный двигатель с цилиндрическим или дисковым ротором без обмотки с постоянным остаточным магнитным полем и асинхронным пуоком. [15]
Страницы: 1 2
www.ngpedia.ru
Подключение электродвигателя – основные составляющие узла
Стандартная схема подключения двигателя предполагает использование пяти составляющих, обеспечивающих правильную и безопасную работу оборудования.
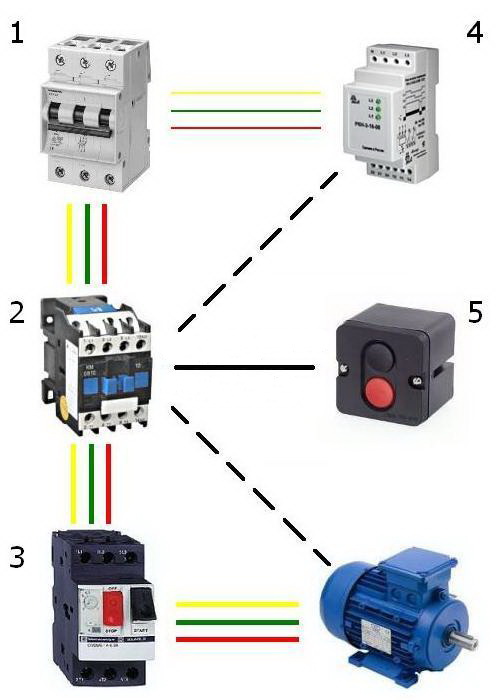
- Вводный автомат – элемент, через который выполняется подключение всех видов оборудования для питания, контроля и управления электрическими агрегатами.
- Магнитный пускатель – коммутационный аппарат, задача которого – включение/отключение питания на стадии рабочего и аварийного режима.
- Тепловое реле – подключение электрического двигателя без этого элемента крайне не рекомендуется. Реле обеспечивает защиту двигателя. Активируется при перегрузках, а также таких негативных явлениях, как обрыв фазы, повреждения механического плана и т.д.
- Реле контроля фаз – контролирует уровень напряжения, симметрии и очередность фаз в трехфазной сети. Если реле фиксирует нарушенную работу какого-либо из объектов контроля, поступает сигнал на отключение/разрыв цепи. Этот элемент играет большую роль не только с позиции подключения двигателя, но и любого другого оборудования, которое предусматривает частую смену местоположения и критично «относится» к правильности подключения фаз.
- Кнопки управления – подключение электродвигателя без применения кнопок в последующем вызывает ряд проблемных моментов. Кнопки позволяют удобно реализовать основное ручное управление работой привода.
В остальном подключение двигателя зависит от типа последнего. Так, некоторые агрегаты могут быть непосредственно подсоединены к источнику питания, а для нормального функционирования других не обойтись без соединения нескольких клемм по определенной схеме.
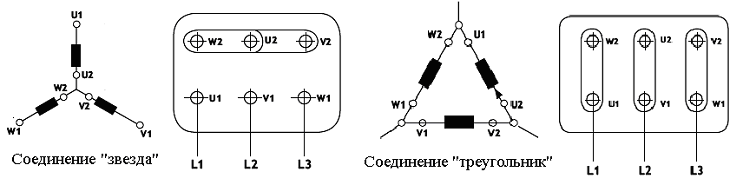
Если у вас есть на руках электродвигатель, как подключить его – подскажет прилагающаяся схема-инструкция с общими рекомендациями. Схема подключения во многом определяется планируемыми условиями использования привода. К примеру, подключение по типу «звезда» гарантирует плавность хода, однако это преимущество омрачается потерей мощности по сравнению с подключением по типу «треугольник» (схема выше).
Последняя схема позволяет задействовать всю мощность, указанную в паспортных данных электрического двигателя. Однако если вы решили подключить электродвигатель по схеме «треугольник», то нужно быть готовым к большим пусковым токам.
Подключение электрического двигателя имеет общие рекомендации только в том случае, если агрегат не подвергался переделкам и его штатная маркировка не изменялась.
www.deltaprivod.ru
Персональный сайт - Область применения гистерезисных двигателей
Исторически – первая область применения гистерезисных двигателей – это счетчики времени. В них использовались малополюсные гистерезисные двигатели со встроенным редуктором. Гистерезисные двигатели применяются так же для завода пружины механических часов, в качестве привода выключателей в программных механизмах, для подачи бумаги в регистрирующих приборах.
В области гироскопии ГД практически не имеют конкурентов. Здесь выгодно используются все их положительные свойства. К данной области примыкают иные инерционные электроприводы, например, электроприводы для центрифуг и центробежных распылителей, которые находят применение в пищевой промышленности, медицине, а также моделировании перегрузок в машиностроении.
Еще одной областью применения гистерезисных двигателей являются устройства записи и воспроизведения звука и изображения, где ГД используются для вращения дисков магнитофонов, магнитных головок видеомагнитофонов, для перемещения ленты в киноаппаратах и в фототелеграфных устройствах.
Гистерезисные преобразователи используются также в качестве муфт, тахогенераторов, генераторов постоянной частоты и демпферов, в частности, для космических объектов.
С повышением энергетических показателей ГД успешно используется в приводе вентиляторов, мешалок, бытовых приборов, автоматических устройств, синхронных транспортеров, станков, в намоточных устройствах текстильной промышленности, в инерционных аккумуляторах энергии и т.д.
Особенности ГД определяют наиболее предпочтительнее области применения: приборный (при небольших мощностях) управляемый электропривод, групповой привод механизмов.
К настоящему времени ГД нашли широкое применение в маломощных управляемых приводах и системах автоматического управления. Их используют в авиации, в объектах навигации, в маркшейдерских устройствах для привода гироскопов, в атомной энергетике, в пищевой, химической и медицинской промышленностях для привода центрифуг, центробежных распылителей и турбомолекулярных насосов, в устройствах записи воспроизведения информации для вращения дисков и магнитных головок, для перемещения ленты в киноаппаратах, фототелеграфах и магнитофонах; в счетчиках времени и программных механизмах часовой промышленности; в качестве муфт, тахогенераторов, демпферов и т.д.
Однако ГД малопригоден там, где требуется высокая точность поддержания углового положения ротора относительно вращающейся синхронной системы координат при отсутствии информации об этом положении и высокая степень линейности характеристик управления.
anboder.narod.ru







Поделиться с друзьями: