После предыдущего поста о мотор-редукторе мне пришло несколько вопросов по регулированию двигателя постоянного тока. Так что пора написать очередной пост :) 1. Статор состоит из источника магнитного поля. Далеко не всегда это постоянный магнит, более того, постоянный магнит это скорей исключение, чем правило. Обычно все же это обмотка возбуждения. По крайней мере на всем, что больше кулака по размерам. 2. Якорь состоит из обмотки якоря и коллекторного узла. Работает все очень и очень просто. Обмотка якоря отталкивается от магнитного поля статора силой Ампера и совершает пол оборота, стремясь вывести эту силу на ноль и таки вывела бы если бы не коллектор, который ловко всех обламывает переключает полярность катушки и сила вновь становится максимальной. И так по кругу. Т.е. коллектор служит механическим инвертором напряжения в якоре. Запомните этот момент, он нам еще пригодится :) Обычно в мелких моторчиках всего два полюса обмотки возбуждения (одна пара) и трехзубцовый якорь. Три зуба это минимум для запуска из любого положения, но чем больше зубцов тем более эффективно используется обмотка, меньше токи и более плавный момент, т.к сила является проекцией на угол, а активный участок обмотки проворачивается на меньший угол ▌Происходящие в двигателе процессыДумаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА. Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой. Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость. А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором. ▌Немного формулНе буду грузить никого выводами, их найдете сами если захотите. Чтобы было поменьше матана рекомендую найти учебник по электроприводу для средних учебных заведений и годом выпуска подревней. От 50х-60х годов самое то :) Там и картинки винтажные и расписано для вчерашнего выпускника сельской семилетки. Много букв и никакого грузилова, все четко и по делу. Самая главная формула коллекторного двигателя постоянного тока: U = Е + Iя*Rя Е = Се * Ф * n Ну и зависимость момента от тока и потока: М = См * Iя * Ф См — конструктивная констатнта. Вот тут стоит обратить внимание, что зависимость момента от тока совершенно прямая. Т.е. просто замеряя ток, при неизменном потоке возбуждения, мы можем совершенно точно узнать величину момента. Это может быть важно, например, чтобы не сломать привод, когда двигло может развить такое усилие, что легко поломает то, что оно там вращает. Особенно с редуктором. Ну и из этого же следует, что момент у машины постоянного тока зависит только от способности источника снабжать его током. Так что идеальный нерушимый сверхпроводящий движок вам на раз лом в узел завяжет, пусть даже он сам с ноготок будет. Только энергию подавай. А теперь смешаем все это в кучу и получим зависимость оборотов от момента — механическую характеристику двигателя. Если ее построить, то будет нечто следующее: n0 — это обороты идеального холостого хода сферического двигателя в вакууме. Т.е. когда наш движок ну ваще халявит, момент равен нулю. Ток потребления тоже, естественно, ноль. Т.к. противоэдс равна напряжению. Чисто теоретический вариант. А вторая точка строится уже с каким-либо моментом на валу. Получается прямая зависимость оборотов от момента. А наклон характеристики определяется сопротивлением якорной цепи. Если никаких добавочных резисторов там нет, то это зовут естественной характеристикой. Обороты идеального холостого хода зависят от напряжения и потока. Больше ни от чего. А если поток константа (постоянный магнит), то только от напряжения. Снижая напряжение вся наша характеристика параллельно смещается вниз. Уменьшили напряжение в два раза — скорость упала в два раза. Если есть возможность менять поток возбуждения, то можно поднимать скорость выше номинальной. Тут зависимость обратная. Ослабляем поток — двигатель разгоняется, но либо падает момент, либо ему надо жрать больше тока. Иной двигатель со снятием возбуждения может и в разнос пойти. Помнится сдавал я затянувшийся курсач по электроприводу, уже хрен знает спустя сколько времени после сессии. Вломы мне его делать было, ага :) Ну и сидел в лаборатории, ждал препода. А там какие то балбесы, на курс ниже, лабу делали. Крутили движок вхолостую, а возбуждение к стенду приверчено было на соплях и слетело с клеммы. Движок в разнос пошел. У нас в лаборатории ЭПА ЮУРГУ все серьезно было, машины стояли нешуточные, по десятку киловатт и под сотню другую кг каждый. Все на суровом напряжении в 380 вольт.В общем, когда эта дура взревела как монстр и стала рваться с креплений, я только и успел крикнуть, что все нахер от машины, вырубай к черту. Не успели, двигло сорвало с креплений, обмотка повылетала с пазов и движку пришел кирдык. Ладно никого не покалечило.Впрочем, лабы привода это то еще развлечение было. У нас там и горело и взрывалось. Там я приобрел замечательные навыки чинить что угодно, чем угодно в сжатые сроки. В среднем, каждый успел по разу убить стенд наглухо, а лаба часто начиналась с починки паяльника, которым чинили осциллограф с помощью которого реанимировали убитый стенд. Добавляя резисторы в якорную цепь мы можем увеличить наклон, т.е. чем больше грузим тем больше падает скорость. Есть еще двигатели не независимого, а последовательного возбуждения. Это когда обмотка статора включена последовательно якорю. Не каждый двигатель так можно включить, обмотка возбуждения должна выдерживать ток якоря. Но у них возникает одно интересное свойство. При пуске возникает большой пусковой ток и этот пусковой ток является же током возбуждения, обеспечивая огромный пусковой момент. Механическая характеристика напоминает гиперболу с максимумом в районе нулевых оборотов. А дальше, по мере разгона, момент падает, а обороты наоборот растут. И если нагрузку убрать с вала, то движок сразу же уходит в разнос. Такие движки ставят на тягловый привод в основном. По крайней мере ставили раньше, до развития силовой электроники. С места эта хрень рвет так, что все стритсракеры нервно закуривают. ▌Режимы работы двигателя постоянного токаНаправление вращения движка зависит от направления тока якоря или направления потока возбуждения. Так что если взять коллекторный двигатель и подключить обмотку возбуждения параллельно якорю, то он будет прекрасно вращаться и на переменном токе (универсальные двигатели, их в кухонную технику часто ставят). Т.к. ток будет одновременно меняться и в якоре и в возбуждении. Момент правда будет пульсирующим, но это мелочи. А для реверса там надо будет поменять полярность включения якоря или возбуждения. Если нарисовать механическую характеристику в четырех квадрантах, то у нас будет нечто похожее на это: Вот, например, характеристика 1 на I участке у нас машина работает как двигатель. Нагрузка растет и в определенный момент двигатель останавливается и начинает вращаться в обратную сторону, т.е. нагрузка обращает его вспять. Это тормозной режим, противовключение. Режим очень тяжелый, двигло греется просто зверски, но для торможения очень эффективный. Если же момент на валу сменит направление и пойдет вращать навстречу движку, то мотор сразу же выйдет на генерацию (IV участок). Характеристика 2 это то же самое, только с обратной полярностью питающего напряжения двигателя. А характеристика 3 это динамическое торможение. Оно же реостатное. Т.е. когда мы берем и просто коротим наш двигатель на резистор или сам на себя. Можете сами проверить, возьмите любой моторчик и покрутите его, а потом закоротите ему якорь и покрутите снова. На валу будет ощутимое усилие, тем больше, чем качественнее движок. Кстати, драйвера двигателей вроде L293 или L297 имеют возможность включить реостатное торможение, подачей обоих ключей вверх или вниз. При этом якорь коротится через драйвер на шину земли или питания. ▌Бесколлекторные двигатели постоянного токаКоллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка говна во всей этой вкусняшке — коллектор. Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо. Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток. А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки. А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его. И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история. easyelectronics.ru Направление ЭДС определяется по правилу правой руки. Направление наводимой ЭДС противоположно направлению протекающего в проводнике тока. Наведенная ЭДС последовательно изменяется по направлению из-за перемещения проводников в магнитном поле. Суммарная ЭДС, равная сумме ЭДС в каждой катушке, прикладывается к внешним выводам двигателя. Это и есть противо-ЭДС. Направление противо-ЭДС противоположно приложенному к двигателю напряжению. Значение противо-ЭДС пропорционально частоте вращения и определяется из следующего выражения: [1] Постоянные момента и ЭДС в точности равны между собой KT = KE. Постоянные KT и KE равны друг другу, если они определены в единой системе едениц. Одним из основных параметров электродвигателя постоянного тока является постоянная электродвигателя Kм. Постоянная электродвигателя определяет способность электродвигателя преобразовывать электрическую энергию в механическую. Справка: Постоянная электродвигателя вместе с размерами электродвигателя являются основными параметрами для инженера при выборе электродвигателя с лучшим соотношением мощность / объем. Постоянная электродвигателя не зависит от соединения обмоток, при условии, что используется один и тот же материал проводника. Например, обмотка двигателя с 6 ветками и 2 параллельными проводами вместо 12 одиночных проводов удвоят постоянную ЭДС, при этом постоянная электродвигателя останется не изменой. Уравнение баланса напряжений на зажимах двигателя постоянного тока имеет вид (в случае коллекторного двигателя не учитывается падение напряжения в щеточно-коллекторном узле): Уравнение напряжения выраженное через момент двигателя будет выглядеть следующим образом: Соотношение между моментом и частотой вращения при двух различных напряжениях питания двигателя постоянного тока неизменно. При увеличении частоты вращения момент линейно уменьшается. Наклон этой функции KTKE/R постоянный и не зависит от значения напряжения питания и частоты вращения двигателя. Благодаря таким характеристикам упрощается управление частотой вращения и углом поворота двигателей постоянного тока. Это характерно для коллекторных и вентильных двигателей постоянного тока, что нельзя сказать о двигателях переменного тока и шаговых двигателях [1]. Упрощенная модель электродвигателя выглядит следующим образом: Механическая постоянная времени - это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое частота вращения ненагруженного электродвигателя достигает уровня в 63,21% (1-1/e) от своего конечного значения. engineering-solutions.ru На статоре находится индукторная обмотка (обмотка возбуждения), на которую подаётся постоянный ток — в результате создаётся постоянное магнитное поле (поле возбуждения). В двигателях с постоянными магнитами поле возбуждения создаётся постоянными магнитами. В обмотку ротора (якорная обмотка) также подаётся постоянный ток, на который со стороны магнитного поля статора действует сила Ампера — создаётся вращающий момент, который поворачивает ротор на 90 электрических градусов, после чего щёточно-коллекторный узел коммутирует обмотки ротора – вращение продолжается. По способу возбуждения двигатели постоянного тока делятся на четыре группы: При прямом пуске ток якоря может на порядок превышать номинальный, поэтому при пуске в цепь якоря вводится пусковое сопротивление пусковой реостат. Для плавного пуска реостат делают ступенчатым — в первый момент включаются все ступени (максимальное сопротивление), по мере разгона двигателя растёт противо-ЭДС, ток якоря уменьшается — ступени выключаются одна за другой. Регулирование питания якоря и обмотки возбуждения осуществляется с помощью тиристорных преобразователей (приводов постоянного тока). © Туманов А.В. 2016-2017 Электрический двигатель – неоценимое изобретение человека. Благодаря этому устройству наша цивилизация за последние сотни лет ушла далеко вперёд. Это настолько важно, что принцип работы электродвигателя изучают ещё со школьной скамьи. Круговое вращение электроприводного вала легко трансформируется во все остальные виды движения. Поэтому любой станок, созданный для облегчения труда и сокращения времени на изготовление продукции, можно приспособить под выполнение множества задач. Каков же принцип действия электродвигателя, как он работает и каково его устройство – обо всём этом понятным языком рассказывается в представленной статье. Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта). При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода. Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора. Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс. Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя. Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется асинхронный двигатель переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное. Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко. Что касается электрической схемы включения двигателя, то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше. На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления. Двигатели постоянного тока (ДПТ), используются для превращения энергии постоянного тока в механическую работу. ДПТ был первой из всех изобретенных вращающихся электромашин. Принцип его действия известен с середины прошлого столетия, и до настоящего времени ДПТ продолжают верно служить человеку, приводя в движение огромное количество машин и механизмов. Двигатель постоянного тока — историческая справка В 1821 году Фарадей, проводя эксперименты при взаимодействии проводников с током и магнитом, увидел, что электрический ток вызывает вращение проводника вокруг магнита. Таким образм, опыт Фарадея подготовил почву для создания электрического двигателя. Немногим позже, Томас Дэвенпортв 1833 году изготовил первый роторный электродвигатель постоянного тока, и реализовал его при движении модель поезда. Годом позже, Б. С. Якоби создал первый в мире электрический двигатель постоянного тока, в котором был использован принцип непосредственного вращения подвижной части двигателя. А уже 13 сентября 1838 г в Российской империи первая моторная лодка с 12 пассажирами поплыла по Неве против течения. Колеса с лопостями приводились во вращение электрическим двигателем, который получал ток от батареи из 320 элементов. В 1886 году электродвигатель постоянного тока стал похож на современные варианты. В дальнейшем он всё более и более модернизировался. Сегодня жизнь нашей техноргенной цивиализации совершенно невозможна без электродвигателя. Он используется практически везде: в поездах, троллейбусах, трамваях. На заводах и фабриках используются мощные электрические станки, приборы бытовой техники (Электромясорубки, кухонные комбайны, кофемолки, пылесосы) и т.п Двигатель постоянного тока принцип работы Подавляющее большинство электродвигателей работает в соответствии с физикой магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней электрический ток, то ее начнет выдавливать наружу.Т.к когда ток течет по проводнику. он формирует вокруг себя кмагнитное поле по всей длине проводника. Направление этого поля можно узнать по правилу буравчика. При взаимодействии кругового магнитного поля проводника и однородного поля магнита, между полюсами поле с одной стороны уменьшается, а с другой увеличивается. То есть среда результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, в соответствии с правилом левой руки. а величина вычисляется по формуле где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода В электродвигателях постоянного тока малой мощности для создания постоянного магнитного поля используются типовые постоянные магниты. В случае средней и большой мощности однородное магнитное поле генерируют с помощью обмотки возбуждения. Рассмотрим процесс получения механического движения с помощью электричества более подробно. В однородном магнитном поле вертикально разместим проволочную рамку и подключим ее к источнику тока. Рамка начнет проворачивается и достигает горизонтального положения. Которое считается нейтральным, т.к в нем воздействие поля на проводник с током равно нулю. Чтобы движение не останавливалось, нужно поместить ещё хотя бы одну рамку с током и обеспечить переключение направления движения тока в необходимый момент. Типичный двигатель вместо одной рамки имеет якорь с множеством проводников, уложенных в специальные пазы, а вместо постоянного магнита — статор с обмоткой возбуждения с двумя и более полюсами. На рисунке чуть выше показан двухполюсный электромотор в разрезе. Если по проводам верхней части якоря пропустить ток движущийся «от нас», а в нижней части — «на нас», то в соответствии с правилом левой руки верхние проводники будут выдавливаться из магнитного поля статора влево, а нижней части якоря — выталкиваться вправо. Т.к медный провод размещен в специальных в пазах якоря, то, вся сила будет переходить и на него, и он будет крутиться. Поэтому, когда проводник с направлением тока «от нас» окажется внизу и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и начнется торможение. Чтобы этого избежать требуется поменять направление тока на обратное, в тот момент когда будет пройдена нейтральная линия. Это осуществляется с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с схемой. Итак, обмотка якоря передает вращающий момент на вал движка постоянного тока, а тот приводит в движение рабочие механизмы. Конструктивно все двигатели состоят из индуктора и якоря, разделенных воздушным промежутком. Статор электродвигателя служит для создания неподвижного магнитного поля и состоит из станины, главных и добавочных полюсов. Станина предназначена для крепления основных и добавочных полюсов и служит элементом магнитной цепи. На главных полюсах имеются обмотки возбуждения, используемые для создания магнитного поля, на добавочных полюсах расположена специальная обмотка, используемая для улучшения условий коммутации. Якорь ЭД постоянного тока состоит из магнитной системы, сделанной из отдельных листов, рабочей обмотки, уложенной в специальные пазы, и коллектора для подвода к рабочей обмотке питания. Коллектор похож на цилиндр, насаженный на вал ЭД и сделанный из изолированных друг от друга медных пластин. На коллекторе находятся специальные выступы-петушки, к которым припаяны концы секций обмотки. Съем тока с коллектора происходит с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки находятся в щеткодержателях, которые удерживают их в определенном положении и создают требуемое нажатие на поверхность коллектора. Щетки и щеткодержатели крепятся на траверсе и связанны с корпусом. Коллектор сложный, дорогой и самый ненадежный узел ЭД. Он часто искрит, создает помехи, забивается пылью от щеток. А при большой нагрузке может все закоротить наглухо. Его главная задача переключать напряжение якоря туда сюда. Чтобы лучше понять работу коллектора сообщим рамке вращательное движение в направлении по часовой стрелке. В момент, когда рамка займет положение, А, в ее проводниках будет индуктироваться максимальный по величине ток, так как проводники пересекают магнитные силовые линии, двигаясь перпендикулярно к ним. Индуктированный ток из проводника В, соединенного с пластиной 2, следует на щетку 4 и, проходя внешнюю цепь, через щетку 3 возвращается в проводник А. При этом правая щетка будет положительной, а левая отрицательной. Дальнейший поворот рамки (положение В) приведет снова к индуктированию тока в обоих проводниках; однако направление тока в проводниках будет противоположно тому, которое они имели в положении А. Так как вместе с проводниками повернутся и коллекторные пластины, то щетка 4 снова будет отдавать электрический ток во внешнюю цепь, а по щетке 3 ток будет возвращаться в рамку. Поэтому, несмотря на изменение направления тока в самих вращающихся проводниках, благодаря переключению, направление тока во внешней цепи не изменилось. В следующий момент (Г), рамка вторично займет положение на нейтральной линии, в проводниках и, во внешней цепи тока опять не будет. В последующие временные интервалы рассмотренный цикл движений будет повторяться в той же последовательности, т.о, направление тока во внешней цепи благодаря коллектору все время будет оставаться постоянным, а вместе с этим сохраняеться и полярность щеток. Щеточный узел используется для подвода питания к катушкам на вращающемся роторе и переключения тока в обмотках. Щетка это неподвижный контакт. Они с большой частотой размыкают и замыкают пластины-контакты коллектора ротора. Для уменьшения искрения последних используют различные способы, основным из которых является использование добавочных полюсов. С ростом разгона начинается следующий процесс, обмотка якоря двигаясь поперек магнитного поля статора и наводит в нем ЭДС. но направлена она встречно той, что вращает ЭД. И в результате, ток через якорь резко уменьшается и тем сильнее, чем больше скорость. Схемы включения двигателя. При параллельном соединении обмоток, обмотка якоря изготавливается из большого количества витков тонкой проволоки. Тогда коммутируемый коллектором ток будет ниже и пластины не будут сильно искрить. Если выполнить последовательное соединение обмоток статора и якоря, то обмотка индуктора выполняется проводником большего диаметра с меньшим количеством витков. Поэтому, намагничивающая сила остаётся постоянной, а характеристики ЭД увеличиваются. Недостатками ЭД постоянного тока можно считать быстрый износ щеточно-коллекторного узла. Достоинства – хорошие характеристики запуска, простая регулировка частоты и направления вращения. Обмотка возбуждения двигателя постоянного тока Наличие обмотки возбуждения у двигателя постоянного тока дает возможность реализовывать различные схемы подключения. В зависимости от того каким образом соединена обмотка возбуждения (ОВ), бывают двигатели постоянного тока с независимым возбуждением, и с самовозбуждением, которое, в свою очередь разделяется на последовательное, параллельное и смешанное. Пуск двигателя постоянного тока Пуск двигателей постоянного тока осложнен возникающими в момент старта огромными значениями моментов и пусковых токов. В ДПТ пусковые токи могут превышать номинальные в 10-40 раз. Такое сильное превышение может легко сжечь обмотки. Поэтому токи при пуске стараются ограничить до уровня (1,5-2) Iн Асинхронный двигатель. Устройство и принцип работы Работа асинхронного двигателя основана на принципах физического взаимодействия магнитного поля, появляющегося в статоре, с током, который это же поле генерирует в роторной обмотке. Cинхронный двигатель. Принцип работы Синхронный двигатель – это разновидность электродвигателей, только работающих от переменного напряжения, при этом частота вращения ротора совпадает с частотой вращения магнитного поля. Именно поэтому она остается постоянной вне зависимости от нагрузки, т.к ротор синхронного двигателя – это обычный электромагнит и его, количество пар полюсов совпадает с числом пар полюсов у вращающегося магнитного поля. Поэтому взаимодействие этих полюсов обеспечивает постоянство угловой скорости, с которой крутится ротор. Схемы управление электродвигателями Электродвигатели устройства для преобразования электрической энергии в механическую и наоборот, но это уже генераторы. Существует огромное разнобразие типов электромоторов, поэтому и схем управления электродвигателями существует великое множество. Рассмотрим некоторые из них Источники: http://www.maxplant.ru/article/dc_drive.php, http://ukrlot.com/princip_deystviya_elektrodvigatelya.html, http://www.texnic.ru/books/electrotex/el026.htm electricremont.ru В данной статье рассматриваются моторы постоянного тока (DC-моторы): их устройство и характеристики. Электромотор — устройство для преобразования электрической энергии в механическую. То есть, устройство на которое надо подать электрический ток, а в замен получить вращение вала мотора. Типичный мотор постоянного тока изображён ниже. Разберёмся как устроен мотор постоянного тока на примере простейшей модели. У нас есть магнитное поле, генерируемое полюсами магнита и металлическая рамка. На клеммы «+» и «-» подаётся питающее напряжение (Up) мотора и по рамке начинает проходить постоянный электрический ток (Ip). На любой проводник, по которому проходит электрический ток, действует, так называемая, сила Ампера (Fa), направление которой зависит от направления тока вдоль проводника. Так как ток проходит от плюса к минусу, получается, что на одной стороне рамки ток направлен слева-направо, а на другой справа-налево. Поэтому сила Ампера на противоположных сторонах рамки направлена в разные стороны. Рамка начинает вращаться. Если подать питающее напряжение наоборот — направление тока изменится и рамка начнет вращение в противоположную сторону. Для большей наглядности, можно посмотреть видео. Рассмотрим основные характеристики мотора на конкретном примере. Рабочее напряжение — диапазон допустимых питающих напряжений. Чем питающее напряжение будет больше, тем больше будет мощность мотора и скорость вращения. Однако, бесконечно повышать напряжение нельзя, так как с каждым новым вольтом, повышается риск того, что мотор перегорит. Для наглядности, проведем эксперимент: будем постепенно повышать питающее напряжение мотора, при этом будем контролировать потребляемый ток мультиметром. Первое, что бросается в глаза — при повышении напряжения от 3 до 9 В, ток изменяется от 40 до 60 мА. Получается, что при увеличении напряжения в 3 раза, ток потребления увеличился всего 2 раза. Теперь вспомним закон Ома: Отсюда видно, что, при постоянном сопротивлении провода, ток в цепи должен увеличиваться во столько же раз, во сколько увеличивается напряжение. То есть, обмотка мотора (проволочная рамка) должна иметь переменное сопротивление. Разберемся с этим парадоксом. Нашу проволочную рамку постоянно пронизывает магнитное поле. Если рамка начинает вращаться, то под действием магнитных сил, в ней возникает напряжение, направленное на противодействие внешних сил, то есть, против внешнего напряжения, которое мы подаем на мотор. Потому, в данном случае, закон Ома надо рассматривать вот так: , где E — обратная электродвижущая сила (наведённое магнитным полем напряжение). Чем быстрее вращается мотор, тем больше значение обратной электродвижущей силы, тем меньше будет потребляемый мотором ток. Поэтому, на холостом ходу мотор всегда потребляет меньший ток, чем под нагрузкой. Номинальное напряжение — наиболее подходящее напряжение, для питания мотора, при котором мотор способен быстро вращаться, при этом не перегреваясь. Ток без нагрузки — ток, потребляемый мотором на холостом ходу. Поскольку, на холостом ходу мотор вращается с максимальной скоростью, то потребляемый ток в таком режиме работы будет минимальным для конкретной модели мотора. Ток при блокировке — ток, потребляемый мотором, при блокировке вала мотора. Данная величина тока потребления будет максимальной. Так как, блокировка вала означает — отсутствие вращения, поэтому будет полностью отсутствовать обратная электродвижущая сила. На практике данную величину можно измерить косвенно, не блокируя вал мотора. Для этого достаточно воспользоваться законом Ома: U — напряжение питания. Его значение нам известно. R — сопротивление обмотки мотора. Данное значение можно измерить мультиметром, подключив его к клеммам мотора, как к обычному резистору. Например, для нашего мотора измерим сопротивление обмотки R = 9.9 Ом. При напряжении питания 6 В, получаем: Диаметр выходного вала — диаметр подвижной оси мотора, которая совершает вращение. Передача — полная аналогия с автомобилем. Внутри мотора установлена группа шестеренок, благодаря которым, можно, в известном соотношении, снизить скорость вращения вала мотора, но, при этом, увеличить его выходную мощность. Скорость без нагрузки — скорость вращения вала мотора (количество оборотов в минуту) на холостом ходу. Крутящий момент или момент силы — векторная физическая величина, характеризующая вращательное действие силы на твёрдое тело. В нашем случае данная величина является произведением двух параметров: расстояние от оси мотора до точки прикрепления груза (см) и усилие (кг). Если вы собираете, например, дрель, то данная величина должна вас беспокоить не сильно. Однако, если если вы хотите прикрепить к вашему мотору втулку на вал, то надо помнить, что при увеличении диаметра втулки, уменьшается максимальное усилие, которое может обеспечить мотор. wiki.amperka.ru В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока. В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n. При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n. Eя = Се * Ф * n (1) Ce — постоянный коэффициент определяемой конструкцией двигателя. Применив второй закон Кирхгофа получаем уравнение напряжения двигателя. U = Eя + Iя * ∑R (2) где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление : Выразим из формулы 2 ток якоря. Из формул 1 и 2 выведем формулу для частоты вращения якоря. Pэм = Ея Iя (5) где: ω = 2*π*f — угловая скорость вращения якоря, Cм — постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя) Момент на валу двигателя, т.е. полезный момент, где М0 момент холостого хода; electrikam.com На статоре находится индукторная обмотка (обмотка возбуждения), на которую подаётся постоянный ток - в результате создаётся постоянное магнитное поле (поле возбуждения). В двигателях с постоянными магнитами поле возбуждения создаётся постоянными магнитами. В обмотку ротора (якорная обмотка) также подаётся постоянный ток, на который со стороны магнитного поля статора действует сила Ампера - создаётся вращающий момент, который поворачивает ротор на 90 электрических градусов, после чего щёточно-коллекторный узел коммутирует обмотки ротора – вращение продолжается. По способу возбуждения двигатели постоянного тока делятся на четыре группы: При прямом пуске ток якоря может на порядок превышать номинальный, поэтому при пуске в цепь якоря вводится пусковое сопротивление пусковой реостат. Для плавного пуска реостат делают ступенчатым - в первый момент включаются все ступени (максимальное сопротивление), по мере разгона двигателя растёт противо-ЭДС, ток якоря уменьшается - ступени выключаются одна за другой. Регулирование питания якоря и обмотки возбуждения осуществляется с помощью тиристорных преобразователей (приводов постоянного тока). www.maxplant.ru Электродвигатель постоянного тока был изобретен раньше других типов машин, преобразующих электрическую энергию в механическую. Несмотря на то, что позднее самое широкое распространение получили двигатели переменного тока, существуют сферы применения, в которых нет альтернативы электродвигателям постоянного тока. Подробно о классификации и принципах работы электрических моторов, рекомендуем прочитать в нашей отдельной статье. Содержание: Электродвигатель постоянного и переменного тока Электродвигатель Якоби. Для того чтобы понять принцип работы электрических двигателей постоянного тока (ДПТ) мы обратимся к истории его создания. Итак, первые опытные доказательства того, что электрическую энергию можно превращать в механическую, продемонстрировал Майкл Фарадей. В 1821 году он провел опыт с проводником, опущенным в сосуд, наполненный ртутью, на дне которого располагался постоянный магнит. После подачи электричества на проводник, тот начинал вращаться вокруг магнита, демонстрируя свою реакцию на имеющееся в сосуде магнитное поле. Эксперимент Фарадея не нашел практического применения, но доказал возможность создания электрических машин, и дал старт развитию электромеханики. Первый электрический двигатель постоянного тока, в основу которого был положен принцип вращения подвижной части (ротора) был создан русским физиком-механиком Борисом Семеновичем Якоби в 1834 году. Это устройство работало следующим образом: 1-4 — металлические кольца, 5 — скользящий контакт, 6 — батарея Описанный принцип использовался в двигателе, который Якоби установил на лодке с 12 пассажирами в 1839 году. Судно двигалось рывками со скоростью в 3 км/ч против течения (по другим данным — 4.5 км/ч), но успешно пересекло реку и высадило пассажиров на берег. В качестве источника питания использовалась батарея с 320 гальваническими элементами, а движение осуществлялось с помощью лопастных колес. Дальнейшее изучение вопроса привело исследователей к разрешению массы вопросов, касаемо того, какие источники питания лучше использовать, как улучшить его рабочие характеристики и оптимизировать габариты. В 1886 году Фрэнком Джулиан Спрэгом впервые был сконструирован электродвигатель постоянного тока, близкий по конструкции тем, которые применяются в наши дни. В нем был реализован принцип самовозбуждения и принцип обратимости электрической машины. К этому моменту все двигатели данного типа перешли на питание от более подходящего источника – генератора постоянного тока. Щёточно-коллекторный узел обеспечивает электрическое соединение цепи ротора с цепями, расположенными в неподвижной части машины В современных ДПТ используется все тот же принцип взаимодействия заряженного проводника с магнитным полем. С усовершенствованием технологий устройство лишь дополняется некоторыми элементами, улучшающими производительность. К примеру, в наши дни постоянные магниты используются лишь в двигателях низкой мощности, поскольку в крупных аппаратах они занимали бы слишком много места. Первоначальные прототипы двигателей данного типа были заметно проще современных аппаратов. Их примитивное устройство включало в себя лишь статор из двух магнитов и якорь с обмотками, на которые подавался ток. Изучив принцип взаимодействия магнитных полей, конструкторы определили следующий алгоритм работы двигателя: Данный алгоритм отлично работал в теории, однако на практике перед создателями первых двигателей вставали характерные проблемы, препятствовавшие функционированию машины: Решение первой проблемы было найдено довольно быстро – для этого было предложено использовать более двух магнитов. Позднее в устройство двигателя стали включать несколько обмоток и коллекторно-щеточный узел, который подавал питание только на одну пару обмоток в определенный момент времени. Коллекторно-щеточная система подачи тока решает и проблему торможения ротора – переключение полярности происходит до того момента, когда вращение ротора начинает замедляться. Это значит, что во время одного оборота двигателя происходит как минимум два переключения полярности. Проблема слабых пусковых токов рассматривается ниже в отдельном разделе. Итак, постоянный магнит закрепляется на корпусе двигателя, образуя вместе с ним статор, внутри которого располагается ротор. После подачи питания на обмотке якоря возникает электромагнитное поле, вступающее во взаимодействие с магнитным полем статора, это приводит к вращению ротора, жестко посаженного на вал. Для передачи электрического тока от источника к якорю двигатель оснащается коллекторно-щеточным узлом, состоящим из: Обмотки якоря одними концами соединяются между собой, а другими – с секциями коллектора, образуя таким образом цепь, по которой ток идет по следующему маршруту: входная щетка –> обмотка ротора -> выходная щетка. Приведенная принципиальная схема (рис. 3) демонстрирует принцип работы примитивного электродвигателя постоянного тока с коллектором из двух секций: Детали электродвигателя постоянного тока Здесь, как уже было отмечено, продемонстрирован принцип работы примитивного прототипа. В настоящих двигателях используется более двух магнитов, а коллектор состоит из большего числа контактных площадок, благодаря чему обеспечивается плавное вращение. В высокомощных двигателях использование постоянных магнитов не представляется возможным из-за их большого размера. Альтернативой для них служит система из нескольких токопроводящих стержней, на каждой из которых имеется своя обмотка, подключаемая к питающим шинам. Одноименные полюса включаются в сеть последовательно. На корпусе может присутствовать от 1 до 4 пар полюсов, а их количеству должно соответствовать число токосъемных щеток на коллекторе. Электродвигатели, рассчитанные на большую мощность, обладают рядом функциональных преимуществ перед более «легкими» аналогами. К примеру, здешнее устройство токосъемных щеток поворачивает их на определенный угол относительно вала для компенсации торможения вала, названного «реакцией якоря». Постепенное оснащение ротора двигателя дополнительными элементами, обеспечивающими его бесперебойную работу и исключающими секторальное торможение, возникает проблема его запуска. Но все это увеличивает вес ротора – с учетом сопротивления вала столкнуть его с места становится сложнее. Первым решением этой проблемы, приходящим в голову, может быть увеличение силы тока, подаваемой на старте, но это может привести к неприятным последствиям: Поэтому такое решение можно назвать скорее рискованной полумерой. Вообще, данная проблема является главным недостатком электродвигателей постоянного тока, но включает в себя основное их преимущество, благодаря которому они незаменимы в некоторых областях. Преимущество это заключается в прямой передаче момента вращения сразу же после пуска – вал (если тронется с места) будет крутиться с любой нагрузкой. Двигатели переменного тока на такое не способны. Решить эту проблему полностью до сих пор не удалось. На сегодняшний день для пуска таких двигателей используется автомат-стартер, чей принцип работы схож с автомобильной коробкой передач: Данный цикл повторяется 3-5 раз (рис. 4) и решает необходимость старта двигателя без возникновения критических нагрузок в сети. Фактически, «плавный» запуск по-прежнему отсутствует, однако оборудование работает безопасно, а главное достоинство электродвигателя постоянного тока – крутящий момент – сохраняется. Подключение ДПТ выполняется несколько сложнее, в сравнении с двигателями со спецификацией на переменный ток. У двигателей высокой и средней мощности, как правило, есть специальные контакты обмотки возбуждения (ОВ) и якоря, вынесенные в клеммную коробку. Чаще всего на якорь подают выходное напряжение источника, а на ОВ – ток, отрегулированный, как правило, реостатом. Скорость вращения двигателя напрямую зависит от силы тока, поданного на обмотку возбуждения. Есть три основные схемы включения якоря и обмотки возбуждения электродвигателей постоянного тока: В современных электрических двигателях постоянного тока могут применяться смешанные схемы, основанные на базе трех описанных. Способ регулирования оборотов ДПТ зависит от схемы его подключения: Данные схемы редко применяются в современном высокотехнологичном оборудовании, поскольку обладают узким диапазоном регулировки и другими недостатками. В наши дни для этих целей все чаще создают электронные схемы управления. Для того чтобы реверсировать (обратить) вращение двигателя постоянного тока необходимо: Как вы уже поняли, использование электродвигателей постоянного тока целесообразно в условиях, когда постоянное беспрерывное подключение к сети неосуществимо. Хорошим примером здесь может служить автомобильный стартер, толкающий двигатель внутреннего сгорания «с места», или детские игрушки с моторчиком. В данных случаях для запуска двигателя используются аккумуляторные батареи. В промышленных целях ДПТ применяются на прокатных станах. Основная же сфера применения ДПТ – электрический транспорт. Пароходы, электровозы, трамваи, троллейбусы и другие аналогичные имеют очень большое пусковое сопротивление, преодоление которого возможно только с помощью двигателей постоянного тока с их мягкими характеристиками и широкими пределами регулировки вращения. С учетом стремительного развития и популяризации экологических транспортных технологий, сфера применения ДПТ лишь увеличивается. Самый простой щёточно-коллекторный узел Резюмируя все вышесказанное, можно описать характерные для электродвигателей постоянного тока достоинства и недостатки относительно их аналогов, рассчитанных на работу от переменного тока. Основные достоинства: Главные недостатки: Электродвигатели постоянного тока, безусловно, проигрывают своим «переменным» сородичам по стоимости и надежности, однако используются и будут использоваться, поскольку плюсы от их использования в определенных сферах категорические перечеркивают все минусы. tokidet.ruПринцип работы двигателя постоянного тока. От чего зависит мощность электродвигателя постоянного тока
Двигатель постоянного тока. Характеристики и регулирование
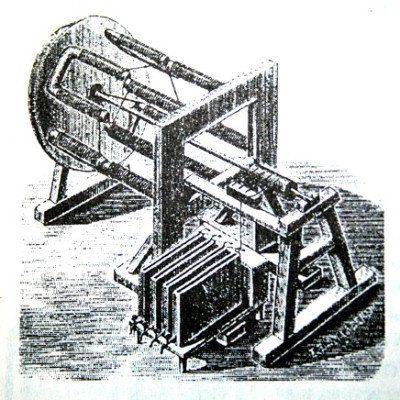
 Двигатель постоянного тока (ДПТ) это один из самых привычных и понятных электродвигателей, он изучается даже в школе, на физике. Он используется практически везде, где нужен малогабаритный моторчик, а также не спешит сдавать своих позиций и там, где мощность измеряется десятками киловатт. О нем и поговорим. ▌Конструктив и базовый принципНе буду тут особо распинаться, покажу картинку из википедии и укажу ряд основных узлов. Все остальное вы и так знаете и трогали своими руками.
Двигатель постоянного тока (ДПТ) это один из самых привычных и понятных электродвигателей, он изучается даже в школе, на физике. Он используется практически везде, где нужен малогабаритный моторчик, а также не спешит сдавать своих позиций и там, где мощность измеряется десятками киловатт. О нем и поговорим. ▌Конструктив и базовый принципНе буду тут особо распинаться, покажу картинку из википедии и укажу ряд основных узлов. Все остальное вы и так знаете и трогали своими руками. 

 Метод плох тем, что резисторы в цепи якоря должны быть расчитаны на ток двигателя, т.е. быть мощными и будут греться зря. Ну и момент резко падает, что плохо.
Метод плох тем, что резисторы в цепи якоря должны быть расчитаны на ток двигателя, т.е. быть мощными и будут греться зря. Ну и момент резко падает, что плохо. Электродвигатель постоянного тока
Постоянная момента
 ,
,Постоянная ЭДС
 ,
, - электродвижущая сила, В,
- электродвижущая сила, В, – постоянная ЭДС, В∙с/рад,
– постоянная ЭДС, В∙с/рад, - угловая частота, рад/с
- угловая частота, рад/сПостоянная электродвигателя
 ,
, - постоянная электродвигателя, Нм/√Вт,
- постоянная электродвигателя, Нм/√Вт, – максимальный момент, Нм,
– максимальный момент, Нм, - мощность потребляемая при максимальном моменте, Вт
- мощность потребляемая при максимальном моменте, ВтЖесткость механической характеристики двигателя
 ,
, - жесткость механической характеристики электродвигателя постоянного тока
- жесткость механической характеристики электродвигателя постоянного токаНапряжение электродвигателя
 ,
,
Мощность электродвигателя постоянного тока

Механическая постоянная времени
 ,
, - механическая постоянная времени, с
- механическая постоянная времени, сСмотрите также
Принцип работы двигателя постоянного тока
Приводы и двигатели постоянного тока
Принцип работы
Двигатели постоянного тока
Пуск двигателя постоянного тока
Регулирование скорости вращения двигателя постоянного тока
Преимущества и недостатки двигателей постоянного тока
Преимущества:
Недостатки:
Как выбрать
Выбор двигателя постоянного тока
Выбор преобразователя постоянного тока

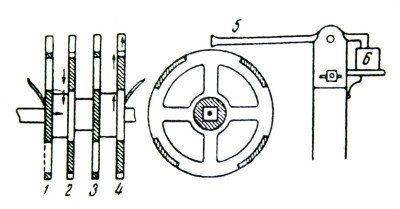
Принцип действия электродвигателя постоянного тока
Как работает двигатель постоянного тока

Принцип действия современных электродвигателей


Двигатель постоянного тока работа









Моторы постоянного тока [Амперка / Вики]
Понятие мотора
Устройство DC-мотора
Характеристики моторов постоянного тока
Электрические параметры
Механические параметры
Основные уравнения двигателя постоянного тока (ДПТ)
Противо ЭДС двигателя Eя
Ток якоря Iя

Частота вращения якоря

Электромагнитная мощность двигателя
Электромагнитный момент



Р2 — полезная мощность двигателя

Принцип работы двигателя постоянного тока
Опубликовано 22.05.2016Принцип работы
Двигатели постоянного тока
Пуск двигателя постоянного тока
Регулирование скорости вращения двигателя постоянного тока
Преимущества и недостатки двигателей постоянного тока
Преимущества:
Недостатки:
Принцип работы электродвигателя постоянного тока, устройство электромотора.

История изобретения

Устройство и принцип работы
Основной принцип
Конструкция

Пусковые токи
Схемы подключения
Регулировка скорости вращения
Реверсирование
Сфера применения

Достоинства и недостатки

интернет-магазин светодиодного освещения
Пн - Вс с 10:30 до 20:00
Санкт-Петербург, просп. Энгельса, 138, корп. 1, тк ''Стройдвор''









Поделиться с друзьями: