Если вы задались целью создать электрический привод, например, собственную мельницу, насосную станцию, транспортерную ленту или другое полезное в хозяйстве устройство, вам надо найти или купить электродвигатель и убедиться в том, что его мощность соответствует поставленным задачам. Сегодня мы осветим некоторые аспекты, касающиеся устройства и рабочих качеств электрических машин, что поможет вам сделать правильный выбор. Подбор электродвигателя стоит начать со знакомства с типами электрических машин. Основное их отличие состоит в способе взаимодействия магнитных полей статора и ротора. По этому признаку они делятся на два типа: У них магнитное поле статора и ротора создается внешними источниками, они независимы друг от друга, их смена положения их полюсов происходит синхронно. Исходя из принципа механики Ньютона, утверждающего, что всякое движение относительно, электродвигатель постоянного тока можно назвать синхронной машиной. Хотя магнитные поля статора и ротора в ней неподвижные, а вращение вала происходит за счет эффекта отталкивания одноименных полюсов магнитов и притягивания разноименных. На них через угольные щетки подается постоянный ток. Во время вращения вала происходит переключение полюсов между парами. Магнитное поле статора может создаваться металлами с остаточным магнетизмом или прохождением тока по обмоткам. Последние применяются в электрических машинах большой мощности. Их достоинством является большой коэффициент полезного действия, до 98%, а также стабильно высокий вращающий момент и малая зависимость от перегрузок. Двигатели постоянного тока отлично подходят для привода подъемных механизмов, а также в качестве тяговых на электротранспорте. Ими очень просто управлять: для снижения скорости вращения надо лишь уменьшить величину подаваемого напряжения, а для реверсирования достаточно сменить полярность. Недостатком является сложность устройства и невысокая надежность щеточного узла, его склонность к искрению и шумность. Кроме того, постоянное напряжение сложно передавать на большие расстояния, из-за чего нет магистральных линий такого типа. Питание придется создавать самостоятельно, используя выпрямительные или инверторные схемы. Также про двигатели постоянного тока можно почитать здесь. По своей конструкции они аналогичны двигателям постоянного тока. Однако питаются переменным однофазным током. Статорная обмотка возбуждения у них включена последовательно с обмоткой якоря. Вращение вала происходит за счет синхронной смены полюсов магнитного поля в статорной и роторной обмотках. К перечисленным выше достоинствам – большому вращающему моменту, нечувствительности к перегрузкам, стоит отнести и то, что это единственная электрическая машина переменного тока, которой можно без проблем управлять. Для изменения скорости вращения вала достаточно уменьшить питающее напряжение, а для реверсирования поменять местами точки подключения коллекторного узла со статорной обмоткой. Поэтому коллекторные электродвигатели широко применяются в бытовых электроприборах. Например, в стиральных машинах, дрелях и другом электрифицированном инструменте. К недостаткам, основным из которых является сложность и малая надежность щеточного узла, стоит отнести и невозможность подключения трехфазного напряжения. Просто потому, что в этом случае щеток должно быть шесть. Это ограничивает максимальную мощность двигателей: у однофазных машин при напряжении 220 вольт это значение не бывает более 2,5 киловатта. Недостатками – сложность пуска и наличие коллектора со щеточным узлом, что снижает их надежность. А также невозможность регулирования частоты вращения. Применяются в установках, которые работают постоянно или с очень длительным рабочим циклом. Например, на перекачивающих станциях или транспортерных лентах. Узнать больше об электродвигателях можно узнать в нашей статье «Электрический двигатель: виды и характеристики». В них магнитное поле ротора является порождением вращающегося магнитного поля статора. Поскольку между этими деталями машины есть воздушный зазор, передача энергии между ними происходит с потерями. Поэтому фаза тока в роторе отстает от фазы тока в статоре на небольшой угол (не более 100), который определяет величину коэффициента мощности cosφ. Это отставание и является причиной того, что электрическую машину этого типа называют асинхронной. Обмотка ротора у них – это набор металлических стержней, которые соединяют два кольца. Получившуюся фигуру называют «беличье колесо». В момент подачи напряжения на статорную обмотку в роторе возникает ток короткого замыкания, энергия которого тратится на раскручивании вала и тем самым гасится. У него несколько меньший КПД, чем у синхронных машин, он не превышает 80%. Для изменения скорости вращения необходимо менять частоту питающего напряжения или количество статорных обмоток, которое определяет количество полюсов электромагнита – чем их больше, тем она ниже. Также электродвигателям с короткозамкнутым ротором свойственен большой пусковой ток, перегружающий сеть, а также резкий рост вращающего момента при подключении питания, что может вызвать поломку редуктора привода. Пуск асинхронных двигателей с короткозамкнутым ротором большой мощности (более 30 кВт) связан с чрезвычайной перегрузкой питающей сети. Для устранения этого явления используют машины с фазным ротором, обмотка которых состоит из трех катушек, соединенных звездой. Их концы соединены угольными щетками с тремя контактными кольцами, расположенными на оси двигателя. Изменяя сопротивление ротора, можно добиться изменения частоты вращения. Достоинством машины такого типа является отсутствие перегрузки в момент запуска и плавное нарастание вращающего момента. Поэтому ее применяют в грузоподъемном оборудовании. Недостаток – сложность устройства и более низкий, чем у машин с короткозамкнутым ротором КПД, он не более 60%. Читайте также «Как работает асинхронный электродвигатель». При расчете мощности электродвигателя надо ориентироваться на потребности обеспечиваемого технологического процесса. В Сети так много методичек для определения этого параметра, что вы можете запутаться окончательно. Предлагаем вам довольно простую универсальную формулу, пригодную для любых случаев. P = T ∙ Ω P – мощность электродвигателя. Т – потребный вращающий момент на валу, а Ω – угловая скорость. T = Ft ∙ R Ft– потребное тяговое усилие, оно рассчитывается по формуле: Ft= t ∙ M ∙ 2.5, где t – коэффициент трения (для подшипников качения он равен 0.02), М – масса перемещаемого груза, а 2.5 – это коэффициент Ньютона. R – радиус рабочего органа, например, крыльчатки насоса. Ω = π ∙ n / 30, где π = 3.14, а n – паспортная частота вращения приводимого в действие устройства.Полученное значение лучше увеличить в 1,5 раза, чтобы предусмотреть возможные перегрузки во время работы привода. При расчете рабочего тока электродвигателя необходимо учитывать, что при соединении обмоток статора асинхронного электродвигателя звездой он в 1,73 раза меньше, чем при соединении треугольником. На эту же величину уменьшается и мощность. Окончательно убедиться в работоспособности созданного привода вы сможете только на практике. Но если вы будете следовать изложенным выше рекомендациям, то вероятность того, что все будет работать как надо без дополнительных переделок, значительно повысится. electriktop.ru Рассмотрим 5 популярных способа как вычислить мощность двигателя автомобиля используя такие данные как: Каждая из формул, по которой будет производиться расчет мощности двигателя автомобиля довольно относительная и не может со 100% точностью определить реальную лошадиную силу движущую машину. Но произведя подсчеты каждым из приведенных гаражных вариантов, опираясь не те или иные показатели, можно рассчитать, по крайней мене, среднее значение будь-то стоковый или тюнингованный движок, буквально с 10-ти процентной погрешностью. Мощность — энергия, вырабатываемая двигателем, она преобразуется в крутящий момент на выходном валу ДВС. Это не постоянная величина. Рядом со значениями максимальной мощности всегда указываются обороты, при которых можно её достигнуть. Точкой максимума достигается при наибольшем среднее эффективном давлении в цилиндре (зависит от качества наполнения свежей топливной смесью, полноты сгорания и тепловых потерь). Наибольшую мощность современные моторы выдают в среднем при 5500–6500 об/мин. В автомобильной сфере измерять мощность двигателя принято в лошадиных силах. Поэтому поскольку большинство результатов выводятся в киловаттах вам понадобится калькулятор перевода кВт в л.с. Самый простой расчет мощности двигателя авто можно определить по зависимости крутящего момента и оборотов. Сила, умноженная на плечо ее приложения, которую может выдать двигатель для преодоления тех или иных сопротивлений движению. Определяет быстроту достижения мотором максимальной мощности. Расчетная формула крутящего момента от объема двигателя: Мкр = VHхPE/0,12566, где Скорость вращения коленчатого вала. Формула для расчета мощности двигателя внутреннего сгорания автомобиля имеет следующий вид: P = Mкр * n/9549 [кВт], где: Поскольку по формуле, результат получим у кВт, то при надобности также можно конвертировать в лошадиные силы или попросту умножать на коэффициент 1,36. Использование данных формул — это самый простой способ перевести крутящий момент в мощность. А дабы не вдаваться во все эти подробности быстрый расчет мощности ДВС онлайн, можно произвести, используя наш калькулятор. Но, к сожалению, данная формула отражает лишь эффективную мощность мотора которая не вся доходит именно до колес автомобиля. Ведь идут потери в трансмиссии, раздаточной коробке, на паразитные потребители (кондиционер, генератор, ГУР и т.п.) и это без учета таких сил как сопротивление качению, сопротивление подъему, аэродинамическое сопротивление. Если же вы не знаете крутящий момент двигателя своего автомобиля, то для определения его мощности в киловаттах также можно воспользоваться формулой такого вида: Ne = Vh * pe * n/120 (кВт), где: Для получения мощности движка в «лошадках», а не киловаттах, результат следует разделить на 0,735. Такой же приблизительный расчет мощности двигателя можно определять и по расходу воздуха. Функция такого расчета доступна тем, у кого установлен бортовой компьютер, поскольку нужно зафиксировать значение расхода, когда двигатель автомобиля, на третьей передаче, раскручен до 5,5 тыс. оборотов. Полученное значение с ДМРВ делим на 3 и получаем результат. Формула как рассчитать мощность ДВС по расходу воздуха в итоге выглядит так: Gв [кг]/3=P[л.с.] Такой расчет, как и предыдущий, показывает мощность брутто (стендовое испытание двигателя без учета потерь), которая выше на 10—20% от фактической. А еще стоит учесть, что показания датчика ДМРВ сильно зависят от его загрязненности и калибровок. Еще один интересный способ как рассчитать мощность двигателя на любом виде топлива, будь-то бензин, дизель или газ – по динамике разгона. Для этого используя вес автомобиля (включая пилота) и время разгона до 100 км. А чтобы Формула подсчета мощности была максимально приближена к истине нужно учесть также потери на пробуксовку в зависимости от типа привода и быстроту реакции разных коробок передач. Приблизительные потери при старте для переднеприводных составит 0,5 сек. и 0,3-0,4 у заднеприводных авто. Используя этот калькулятор мощности ДВС, который поможет определить мощность двигателя исходя из динамики разгона и массы, вы сможете быстро и достаточно точно узнать мощь своего железного коня не вникая в технические характеристики. Не менее эффективным показателем мощности автомобильного двигателя является производительность форсунок. Ранее мы рассматривали её расчет и взаимосвязь, поэтому, труда, высчитать количество лошадиных сил по формуле, не составит. Подсчет предполагаемой мощности происходит по такой схеме: Где, коэффициент загруженности не более 75-80% (0,75…0,8) состав смеси на максимальной производительности где-то 12,5 (обогащенная), а коэффициент BSFC будет зависеть от того какой это у вас двигатель, атмосферный или турбированный (атмо — 0.4-0.52, для турбо — 0.6-0.75). Узнав все необходимые данные, водите в соответствующие ячейки калькулятора показатели и по нажатию кнопки «Рассчитать» Вы сразу же получаете результат, который покажет реальную мощность двигателя вашего авто с незначительной погрешностью. Заметьте, что вам совсем не обязательно знать все представленные параметры, можно расчищать мощность ДВС отдельно взятым методом. Ценность функционала данного калькулятора заключается не в расчете мощности стокового автомобиля, а если ваш автомобиль подвергся тюнингу и его масса и мощность притерпели некоторые изменения. etlib.ru В статье для упрощения обозначений линейные величины напряжения, тока и мощности трехфазной системы будут даваться без индексов, т. е. U, I и P. Мощность трехфазного тока равна тройной мощности одной фазы. При соединении в звезду PY=3∙Uф∙Iф∙ cosφ =3∙Uф∙I∙ cosφ. При соединении в треугольник P∆=3∙Uф∙Iф∙ cosφ =3∙U∙Iф∙ cosφ. На практике применяется формула, в которой ток и напряжение обозначают линейные величины и для соединения в звезду и в треугольник. В первое уравнение подставим Uф=U/√3, а во второе Iф=I/√3, получим общую формулу P=√3∙U∙I ∙ cosφ. 1. Какую мощность P1 берет из сети трехфазный асинхронный двигатель, показанный на рис. 1 и 2, при соединении в звезду и треугольник, если линейное напряжение U=380 В, а линейный ток I=20 А при cosφ =0,7? Вольтметр и амперметр показывают линейные значения, действующие значения. Мощность двигателя по общей формуле будет: P1=√3∙U∙I ∙ cosφ =√3∙380∙20∙0,7=9203 Вт=9,2 кВт. Если подсчитать мощность через фазные значения тока и напряжения, то при соединении в звезду фазный ток равен Iф=I=20 А, а фазное напряжение Uф=U/√3=380/√3, P1=3∙Uф∙Iф ∙ cosφ =3∙U/√3∙I∙ cosφ =3∙380/√3∙20∙0,7; P1=3∙380/1,73∙20∙0,7=9225 Вт ≈9,2 кВт. При соединении в треугольник фазное напряжение Uф=U, а фазный ток Iф=I/√3=20/√3; таким образом, P1=3∙Uф∙Iф ∙ cosφ =3∙U∙I/√3∙ cosφ ; P1=3∙380∙20/1,73∙0,7=9225 Вт ≈9,2 кВт. 2. В четырехпроводную сеть трехфазного тока между линейными и нулевым проводами включены лампы, а к трем линейным проводам подключается двигатель Д, как показано на рис. 3. На каждую фазу включены 100 ламп по 40 Вт каждая и 10 двигателей мощностью по 5 кВт. Какие активную и полную мощности должен отдавать генератор Г при sinφ=0,8? Каковы токи фазный, линейный и в нулевом проводе генератора при линейном напряжении U=380 В? Общая мощность ламп Pл=3∙100∙40 Вт =12000 Вт =12 кВт. Лампы находятся под фазным напряжением Uф=U/√3=380/1,73=220 В. Общая мощность трехфазных двигателей Pд=10∙5 кВт =50 кВт. Активная мощность, отдаваемая генератором, PГ и получаемая потребителем P1 равны, если пренебречь потерей мощности в проводах электропередачи: P1= PГ=Pл+Pд=12+50=62 кВт. Полная мощность генератора S=PГ/ cosφ =62/0,8=77,5 кВА. В этом примере все фазы одинаково нагружены, а потому в нулевом проводе в каждое мгновение ток равен нулю. Фазный ток обмотки статора генератора равен линейному току линии (Iф=I), а его значение можно получить, воспользовавшись формулой для мощности трехфазного тока: I=P/(√3∙U ∙ cosφ )=62000/(√3∙380∙0,8)=117,8 А. 3. На рис. 4 показано, что к фазе B и нулевому проводу подключена плитка мощностью 500 Вт, а к фазе C и нулевому проводу – лампа 60 Вт. К трем фазам ABC подключены двигатель мощностью 2 кВт при cosφ =0,7 и электрическая плита мощностью 3 кВт. Чему равны общая активная и полная мощности потребителей? Какие токи проходят в отдельных фазах при линейном напряжении сети U=380 В? Активная мощность потребителей P=500+60+2000+3000=5560 Вт=5,56 кВт. Полная мощность двигателя S=P/ cosφ =2000/0,7=2857 ВА. Общая полная мощность потребителей будет: Sобщ=500+60+2857+3000=6417 ВА =6,417 кВА. Ток электрической плитки Iп=Pп/Uф =Pп/(U⁄√3)=500/220=2,27 А. Ток лампы Iл=Pл/Uл =60/220=0,27 А. Ток электрической плиты определим по формуле мощности для трехфазного тока при cosφ =1 (активное сопротивление): P=√3∙U∙I∙ cosφ =√3∙U∙I; Ток двигателя IД=P/(√3∙U∙ cosφ )=2000/(√3∙380∙0,7)=4,34 А. В проводе фазы A течет ток двигателя и электрической плиты: В фазе B течет ток двигателя, плитки и электрической плиты: В фазе C течет ток двигателя, лампы и электрической плиты: Везде даны действующие значения токов. На рис. 4 показано защитное заземление З электрической установки. Нулевой провод заземляется наглухо у питающей подстанции и потребителя. Все части установок, к которым возможно прикосновение человека, присоединяются к нулевому проводу и тем самым заземляются. При случайном заземлении одной из фаз, например C, возникает однофазное короткое замыкание и предохранитель или автомат этой фазы отключает ее от источника питания. Если человек, стоящий на земле, коснется неизолированного провода фаз A и B, то он окажется только под фазным напряжением. При незаземленной нейтрали фаза C не была бы отключена и человек оказался бы под линейным напряжением по отношениям к фазам A и B. 4. Какую подводимую к двигателю мощность покажет трехфазный ваттметр, включенный в трехфазную сеть с линейным напряжением U=380 В при линейном токе I=10 А и cosφ =0,7? К. п. д. двигателя η=0,8? Чему равна мощность двигателя на валу (рис. 5)? Ваттметр покажет подводимую к двигателю мощность P1 т. е. мощность полезную P2 плюс потери мощности в двигателе: P1=√(3∙) U∙I∙ cosφ =1,73∙380∙10∙0,7=4,6 кВт. Полезная мощность, за вычетом потерь в обмотках и стали, а также механических в подшипниках 5. Трехфазный генератор отдает ток I=50 А при напряжении U=400 В и cosφ =0,7. Какая механическая мощность в лошадиных силах необходима для вращения генератора при к. п. д. генератора η=0,8 (рис. 6)? Активная электрическая мощность генератора, отдаваемая электродвигателю, PГ2=√(3∙) U∙I∙ cosφ =√3∙400∙50∙0,7=24220 Вт =24,22 кВт. Механическая мощность, подводимая к генератору, PГ1 покрывает активную мощность PГ2 и потери в нем: PГ1=PГ2/ηГ =24,22/0,8≈30,3 кВт. Эта механическая мощность, выраженная в лошадиных силах, равна: PГ1=30,3∙1,36≈41,2 л. с. На рис. 6 показано, что к генератору подводится механическая мощность PГ1. Генератор преобразует ее в электрическую, которая равна PГ2=PГ1∙ηГ. Эта мощность, активная и равна PГ2=√3∙U∙I∙ cosφ. передается по проводам электродвигателю, в котором она преобразуется в механическую мощность. Кроме того, генератор посылает электродвигателю реактивную мощность Q, которая намагничивает двигатель, но в нем не расходуется, а возвращается в генератор. Она равна Q=√3∙U∙I∙sinφ и не превращается ни в тепло, ни в механическую мощность. Полная мощность S=P⁄ cosφ. как мы видели раньше, определяет только степень использования материалов, затраченных на изготовление машины. 6. Трехфазный генератор работает при напряжении U=5000 В и токе I=200 А при cosφ =0,8. Чему равен его к. п. д. если мощность, отдаваемая двигателем, вращающим генератор, равна 2000 л. с. Мощность двигателя, поданная на вал генератора (если нет промежуточных передач), Мощность, развиваемая трехфазным генератором, PГ2=√(3∙) U∙I∙ cosφ =1,73∙5000∙200∙0,8=1384000 Вт =1384 кВт. К. п. д. генератора η= PГ2/PГ1 =1384/1472=0,94=94%. 7. Какой ток проходит в обмотке трехфазного трансформатора при мощности 100 кВА и напряжении U=22000 В при cosφ =1? Полная мощность трансформатора S=√3∙U∙I=1,73∙22000∙I. Отсюда ток I=S/(√3∙U)=(100∙1000)/(1,73∙22000)=2,63 А. 8. Какой ток потребляет трехфазный асинхронный двигатель при мощности на валу 40 л. с. при напряжении 380 В, если его cosφ =0,8, а к. п. д. η=0,9? Мощность двигателя на валу, т. е. полезная, P2=40∙736=29440 Вт. Подводимая к двигателю мощность, т. е. мощность, получаемая из сети, Ток двигателя I=P1/(√3∙U∙I∙ cosφ )=32711/(1,73∙380∙0,8)=62 А. 9. Трехфазный асинхронный двигатель имеет на щитке следующие данные: P=15 л. с.; U=380/220 В; cosφ =0,8; η=85%; соединение – звезда. Величины, обозначенные на щитке, называются номинальными. Чему равны активная, полная и реактивная мощности двигателя? Каковы величины токов: полного, активного и реактивного (рис. 7)? Механическая мощность двигателя (полезная) равна: Подводимая к двигателю мощность P1 больше полезной на величину потерь в двигателе: Полная мощность S=P1/ cosφ =13/0,8=16,25 кВА; Q=S∙sinφ=16,25∙0,6=9,75 кВАр (см. треугольник мощностей). Ток в соединительных проводах, т. е. линейный, равен: I=P1/(√3∙U∙ cosφ )=S/(√3∙U)=16250/(1,73∙380)=24,7 А. Активный ток Iа=I∙ cosφ =24,7∙0,8=19,76 А. Реактивный (намагничивающий) ток Iр=I∙sinφ=24,7∙0,6=14,82 А. 10. Определить ток в обмотке трехфазного электродвигателя, если она соединена в треугольник и полезная мощность двигателя P2=5,8 л. с. при к. п. д. η=90%, коэфφциенте мощности cosφ =0,8 и линейном напряжении сети 380 В. Полезная мощность двигателя P2=5,8 л. с. или 4,26 кВт. Поданная к двигателю мощность P1=P2/η=4,26/0,9=4,74 кВт. I=P1/(√3∙U∙ cosφ )=(4,74∙1000)/(1,73∙380∙0,8)=9,02 А. При соединении в треугольник ток в обмотке фазы двигателя будет меньше, чем ток подводящих проводов: Iф=I/√3=9,02/1,73=5,2 А. 11. Генератор постоянного тока для электролизной установки, рассчитанный на напряжение U=6 В и ток I=3000 А, в соединении с трехфазным асинхронным двигателем образует двигатель-генератор. К. п. д. генератора ηГ=70%, к. п. д. двигателя ηД=90%, а его коэфφциент мощности cosφ =0,8. Определить мощность двигателя на валу и подводимую к нему мощность (рис. 8 и 6). Полезная мощность генератора PГ2=UГ∙IГ=6∙3000=18000 Вт. Подводимая к генератору мощность равна мощности на валу P2 приводного асинхронного двигателя, которая равна сумме PГ2 и потерь мощности в генераторе, т. е. PГ1=PГ2/η=18000/0,7=25714 Вт. Активная мощность двигателя, подаваемая к нему из сети переменного тока, P1=P2/ηД =25714/0,9=28571 Вт =28,67 кВт. 12. Паровая турбина с к. п. д. ηТ=30% вращает генератор с к. п. д. ηГ=92% и cosφ =0,9. Какую подводимую мощность (л. с. и ккал/сек) должна иметь турбина, чтобы генератор обеспечивал ток 2000 А при напряжении U=6000 В? (Перед началом расчета см. рис. 6 и 9.) Мощность генератора переменного тока, отдаваемая потребителю, PГ2=√(3∙) U∙I∙ cosφ =1,73∙6000∙2000∙0,9=18684 кВт. Подводимая к генератору мощность равна мощности P2 на валу турбины: PГ1=P2=PГ2/ηГ =18684/0,92=20308 кВт. Подводимая к турбине при помощи пара мощность P1=P2/ηТ =20308/0,3=67693 кВт, или P1=67693∙1,36=92062 л. с. Подводимую мощность к турбине в ккал/сек определим по формуле Q=0,24∙P∙t; 13. Определить сечение провода длиной 22 м, по которому идет ток к трехфазному двигателю мощностью 5 л. с. напряжением 220 В при соединении обмотки статора в треугольник. cosφ =0,8; η=0,85. Допустимое падение напряжения в проводах ∆U=5%. Подводимая к двигателю мощность при полезной мощности P2 По соединительным проводам протекает ток I=P1/(U∙√3∙ cosφ ) = 4430/(220∙√3∙0,8)=14,57 А. В трехфазной линии токи складываются геометрически, поэтому падение напряжения в проводе следует брать ∆U. √3, а не ∆U. 2, как при однофазном токе. Тогда сопротивление провода: где ∆U – в вольтах. S=(ρ∙l)/r=1/57∙22/0,436=0,886 мм2 ≈1 мм2. Сечение проводов в трехфазной цепи получается меньшим, чем в однофазной. 14. Определить и сравнить сечения проводов для постоянного переменного однофазного и трехфазного токов. К сети подсоединены 210 ламп по 60 Вт каждая на напряжение 220 В, находящиеся на расстоянии 200 м, от источника тока. Допустимое падение напряжения 2%. а) При постоянном и однофазном переменном токах, т. е. когда имеются два провода, сечения будут одинаковыми, так как при осветительной нагрузке cosφ =1 и передаваемая мощность а ток I=P/U=12600/220=57,3 А. Допустимое падение напряжения ∆U=220∙2/100=4,4 В. Сопротивление двух проводов r=∆U/I∙4,4/57,3=0,0768 Ом. Для передачи мощности необходимо общее сечение проводов 2∙S1=2∙91,4=182,8 мм2 при длине провода 200 м. б) При трехфазном токе лампы можно соединить в треугольник, по 70 ламп на сторону. При cosφ =1 передаваемая по проводам мощность P=√3∙Uл∙I. Допустимое падение напряжения в одном проводе трехфазной сети не ∆U⁄2 (как в однофазной сети), a ∆U⁄√3. Сопротивление одного провода в трехфазной сети будет: Общее сечение проводов для передачи мощности 12,6 кВт в трехфазной сети при соединении в треугольник меньше, чем в однофазной: 3∙S3ф=137,1 мм2. в) При соединении в звезду необходимо линейное напряжение U=380 В, чтобы фазное напряжение на лампах было 220 В, т. е. чтобы лампы включались между нулевым проводом и каждым линейным. Ток в проводах будет: I=P/(U:√3)=12600/(380:√3)=19,15 А. Сопротивление провода r=(∆U:√3)/I=(4,4:√3)/19,15=0,1325 Ом; Общее сечение при соединении в звезду – самое маленькое, что достигается увеличением напряжения тока для передачи данной мощности: 3∙S3зв=3∙25,15=75,45 мм2. Автор: admin Рубрика: Электродвигателя 4 комментария Перед этим я уже немного затрагивал темы электродвигателей, когда писал о том как запустить асинхронные двигателей. и когда писал какие бывают номиналы электродвигателей . Ну а теперь приступим конкретно к самому расчёту. Допустим: у вас есть трёхфазный асинхронный электродвигателей переменного тока, номинальная мощность, которого составляет 25 кВт, и вам хочется узнать какой же у него будет номинальный ток. Для этого существует специальная формула: Iн = 1000Pн /√3•(ηн • Uн • cosφн ), Где Pн – это мощность электродвигателя; измеряется в кВт Uн – это напряжение, при котором работает электродвигатель; В ηн – это коэффициент полезного действия, обычно это значение 0.9 ну и cosφн – это коэффициент мощности двигателя, обычно 0.8. Последние два значения обычно пишутся на заводской бирке, хотя они у всех двигателей практически одинаковые. Но все же нужно брать данные именно с заводской бирки на двигателе. Вот как на этой картинке все значения видны, а ток нет. Только если КПД написан 81%, то для расчёта нужно брать 0.81. Теперь подставим значения Iн = 1000•25/√3 • (0.9 • 380 • 0.8) = 52.81 А Тем, кто не помнит, сколько будет √3, напоминаю – это будет 1,732 Вот и всё, все расчёты закончены. Всё очень легко и просто. По моему образцу вы можете легко рассчитать номинальный ток электродвигателя, вам всего лишь нужно подставить своих данных. Ещё в заключении, хотел поделиться с вами, тем как я определяю приблизительное значение тока без всяких расчётов. Если реально посмотреть, что у нас с вами получилось при расчёте, то реально вид, что номинальный ток приблизительно в два раза больше чем его мощность. Вот так я определяю ток на практике, мощность умножаю на два. Но это только приблизительное значение. А ток холостого хода будет обычно в два раза меньше, чем его мощность. Но про то, как определить эти значения, мы поговорим с вами в следующих статьях. Так что подписывайтесь на обновления и не забываете поделиться этой статьёй со своими друзьями в социальных сетях. На этом у меня всё. Пока. С уважением Александр! Привет посетители сайта fazanet.ru, и в сегодняшней статье мы с вами разберём, как же сделать, этот непонятный расчёт тока электродвигателя. Каждый уважающий себя электромонтёр, робота которого связана с обслуживанием электрических, машин просто обязан это знать. Я в своё время тоже помню, что меня это очень сильно интересовало, когда меня перевили с одного цеха в другой. […] Правильность подбора электродвигателя, учитывающая специфику приводного механизма, условия работы и окружающей среды, определяет длительность безаварийной работы и надежность системы «двигатель – нагрузка». Далее приведены рекомендации по выбору электродвигателя (последовательность, в которой они представлены, не является обязательной). На первом этапе необходимо определиться с типом электрического двигателя. Ниже даны краткое описание, преимущества и недостатки, сферы предпочтительного применения основных типов двигателей. Основным преимуществом данных двигателей, которое определяло повсеместное их использование на этапе развития электрических приводов, является легкость плавного регулирования скорости в широких пределах. Поэтому с развитием полупроводниковой промышленности и появлением относительно недорогих преобразователей частоты процент их использования постоянно уменьшается. Там, где это возможно двигатели постоянного тока заменяются приводами на основе асинхронных двигателей с короткозамкнутым ротором. Основные недостатки двигателя постоянного тока (невысокая надежность, сложность обслуживания и эксплуатации) обусловлены наличием коллекторного узла. Кроме того, для питания двигателя необходим источник постоянного тока или тиристорный преобразователь переменного напряжения в постоянное. При всех своих недостатках двигатели постоянного тока обладают высоким пусковым моментом и большой перегрузочной способностью. Что определило их использование в металлургической промышленности, станкостроении и на электротранспорте. Основным преимуществом данных двигателей является то, что они могут работать с коэффициентом мощности cosφ =1, а в режиме перевозбуждения даже отдавать реактивную мощность в сеть, что благоприятно сказывается на характеристиках сети: увеличивается ее коэффициент мощности, уменьшаются потери и падение напряжения. Кроме того, синхронные двигатели устойчивы к колебаниям сети. Максимальный момент синхронного двигателя пропорционален напряжению, при этом момент асинхронного двигателя пропорционален квадрату напряжения. Следовательно, при снижении напряжения синхронный двигатель сохраняет большую перегрузочную способность, а возможность форсировки возбуждения увеличивает надежность их работы при аварийных понижениях напряжения. Больший воздушный зазор по сравнению с асинхронным двигателем и применение постоянных магнитов делает КПД синхронных двигателей выше. Их особенностью также является постоянство скорости вращения при изменении момента нагрузки на валу. При всех достоинствах синхронного двигателя основными недостатками, ограничивающими их применение являются сложность конструкции, наличие возбудителя, высокая цена, сложность пуска. Поэтому синхронные двигатели преимущественно используются при мощностях свыше 100 кВт. Основное применение – насосы, компрессоры, вентиляторы, двигатель-генераторные установки. По конструктивному принципу асинхронные двигатели подразделяются на двигатели с короткозамкнутым и фазным ротором. При этом большинство используемых электродвигателей являются асинхронными с короткозамкнутым ротором. Столь широкое применение обусловлено простотой их конструкции, обслуживания и эксплуатации, высокой надежностью, относительно низкой стоимостью. Недостатками таких двигателей являются большой пусковой ток, относительно малый пусковой момент, чувствительность к изменениям параметров сети, а для плавного регулирования скорости необходим преобразователь частоты. Кроме того, асинхронные двигатели потребляют реактивную мощность из сети. Предел применения асинхронных электродвигателей с короткозамкнутым ротором определяется мощностью системы электроснабжения конкретного предприятия, так как большие пусковые токи при малой мощности системы создают большие понижения напряжения. Использование асинхронных двигателей с фазным ротором помогает снизить пусковой ток и существенно увеличить пусковой момент, благодаря введению в цепь ротора пусковых реостатов. Однако, ввиду усложнения их конструкции, и как следствие, увеличения стоимости их применение ограничено. Основное применение – приводы механизмов с особо тяжелыми условиями пуска. Для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть использовано устройство плавного пуска или преобразователь частоты. В системах, где необходимо ступенчатое изменение скорости (например, лифты) используют многоскоростные асинхронные двигатели. В механизмах, требующих остановки за определенное время и фиксации вала при исчезновении напряжения питания, применяются асинхронные двигатели с электромагнитным тормозом (металлообрабатывающие станки, лебедки). Существуют также асинхронные двигатели с повышенным скольжением, которые предназначены для работы в повторно-кратковременных режимах, а также режимах с пульсирующей нагрузкой. После того, как определен тип электродвигателя, полностью учитывающий специфику рабочего механизма и условия работы, необходимо определиться с рабочими параметрами двигателя: мощностью, номинальным и пусковым моментами, номинальными напряжением и током, режимом работы, коэффициентом мощности, классом энергоэффективности. В общем случае для квалифицированного подбора электродвигателя должна быть известна нагрузочная диаграмма механизма. Однако, в случае постоянной или слабо меняющейся нагрузки без регулирования скорости достаточно рассчитать требуемую мощность по теоретическим или эмпирическим формулам, зная рабочие параметры нагрузки. Ниже приведены формулы для расчета мощности двигателя P2 [кВт] некоторых механизмов. где Q [м 3 /с] – производительность вентилятора, Н [Па] – давление на выходе вентилятора, ηвент . ηпер – КПД вентилятора и передаточного механизма соответственно, kз – коэффициент запаса. где Q [м 3 /с] – производительность насоса, g =9,8 м/с 2 – ускорение свободного падения, H [м] – расчетная высота подъема, ρ [кг/м 3 ] – плотность перекачиваемой жидкости, ηнас , ηпер – КПД насоса и передаточного механизма соответственно, kз – коэффициент запаса. где Q [м 3 /с] – производительность компрессора, А [Дж/м 3 ] – работа изотермического и адиабатического сжатия атмосферного воздуха объемом 1 м 3 давлением 1,1·10 5 Па до требуемого давления, ηкомпр , ηпер – КПД компрессора и передаточного механизма соответственно, kз – коэффициент запаса. Кроме того, необходимо сопоставить пусковой момент двигателя (особенно в случае асинхронного с короткозамкнутым ротором) и рабочего механизма, так как некоторые механизмы имеют повышенное сопротивление в момент трогания. Следует иметь в виду и то обстоятельство, что при замене трехфазного асинхронного двигателя на однофазный пусковой момент последнего почти в три раза меньше и механизм, успешно функционировавший ранее, может не тронуться с места. Развиваемый электродвигателем момент M [Нм] и полезная мощность на валу Р2 [кВт] связаны следующим соотношением Полная мощность, потребляемая из сети: для двигателей постоянного тока (она же активная) для двигателей переменного тока при этом потребляемые активная и реактивная мощности соответственно В случае синхронного двигателя значение Q1 может получиться отрицательным, это означает, что двигатель отдает реактивную мощность в сеть. Важно отметить следующее. Не следует выбирать двигатель с большим запасом по мощности, так как это приведет к снижению его КПД, а в случае двигателя переменного тока также к снижению коэффициента мощности. При выборе напряжения электродвигателя необходимо учитывать возможности системы энергоснабжения предприятия. При этом нецелесообразно при больших мощностях выбирать двигатель с низким напряжением, так как это приведет к неоправданному удорожанию не только двигателя, но и питающих проводов и коммутационной аппаратуры вследствие увеличения расхода меди. Если при трогании момент сопротивления нагрузки невелик и для уменьшения пусковых токов асинхронного двигателя с короткозамкнутым ротором может быть применен способ пуска с переключением со «звезды» на «треугольник», необходимо предусмотреть вывод в клеммную коробку всех шести зажимов обмотки статора. В общем случае применение схемы соединения «звезда» является предпочтительным, так как в схеме «треугольник» имеется контур для протекания токов нулевой последовательности, которые приводят к нагреву обмотки и снижению КПД двигателя, в соединении «звезда» такой контур отсутствует. Нагрузка электродвигателя в процессе работы может изменяться различным образом. ГОСТом предусмотрены восемь режимов работы. При этом для обоснованного выбора двигателя с целью оптимального его использования рекомендуется применять методы эквивалентных величин. В настоящее время вопросам энергоэффективности уделяется огромное внимание. При этом под энергоэффективностью понимается рациональное использование энергетических ресурсов, с помощью которого достигается уменьшение потребления энергии при том же уровне мощности нагрузки. Основным показателем энергоэффективности двигателя является его коэффициент полезного действия где Р2 – полезная мощность на валу, Р1 – потребляемая активная мощность из сети. Стандартом IEC 60034-30 для асинхронных электродвигателей с короткозамкнутым ротором были установлены три класса энергоэффективности: IE1, IE2, IE3. Рис. 1. Классы энергоэффективности Так, например, использование двигателя мощностью 55 кВт повышенного класса энергоэффективности позволяет сэкономить около 8000 кВт в год от одного двигателя. Степень защиты IP, виды климатических условий и категорий размещения ГОСТ Р МЭК 60034-5 – 2007 устанавливает классификацию степеней защиты, обеспечиваемых оболочками машин. Обозначение степени защиты состоит из букв латинского алфавита IP и последующих двух цифр (например, IP55). Большинство электродвигателей, выпускаемых в настоящее время, имеют степени защиты IP54 и IP55. Категория размещения обозначается цифрой: 1 – на открытом воздухе; 2 – под навесом при отсутствии прямого солнечного воздействия и атмосферных осадков; 3 – в закрытых помещениях без искусственного регулирования климатических условий; 4 – в закрытых помещениях с искусственно регулируемыми климатическими условиями. У – умеренный климат; УХЛ – умеренно холодный климат; ХЛ – холодный климат; Т – тропический климат. Таким образом, при выборе электродвигателя необходимо учитывать условия окружающей среды (температура, влажность), а также необходимость защиты двигателя от воздействия инородных предметов и воды. Например, использование электродвигателя с типом климатического исполнения и категорией размещения У3 на открытом воздухе является недопустимым. Усилия, действующие на вал двигателя со стороны нагрузки Наиболее нагруженными в двигателе являются подшипниковые узлы. Поэтому при выборе двигателя должны быть учтены радиальные и осевые усилия, действующие на рабочий конец вала двигателя со стороны нагрузки. Превышения допустимых значений сил приводит к ускоренному выходу из строя не только подшипников, но и всего двигателя (например, задевание ротора о статор). Обычно допустимые значения сил для каждого подшипника приведены в каталогах. Рекомендуется в случае повышенных радиальных усилий (ременная передача) на рабочий конец вала установить роликовый подшипник, при этом предпочтительным является двигатель с чугунными подшипниковыми щитами. Особенности конструкции двигателя при работе от преобразователя частоты В настоящее время все большее распространение приобретает использование частотно-регулируемого привода (ЧРП), выполненного на основе асинхронного электродвигателя с короткозамкнутым ротором. При использовании частотно-регулируемого привода достигается: 1. экономия электроэнергии; 2. плавность пуска и снижение пусковых токов; 3. увеличение срока службы двигателя. В общем случае стандартный электродвигатель нельзя использовать в составе частотно-регулируемого привода, так как при уменьшении скорости вращения снижается эффективность охлаждения. При регулировании скорости вверх от номинальной резко увеличивается нагрузка от собственного вентилятора. В обоих случаях уменьшается нагрузочная способность двигателя. Кроме того, в случае использования двигателя в системах точного регулирования необходим датчик положения ротора двигателя. При работе электродвигателя от преобразователя частоты в контуре вал – фундаментная плита могут протекать токи. При этом возникает точечная эрозия на шариках и роликах, на беговых кольцах подшипников качения, а также на баббитовой поверхности подшипников скольжения. От электролиза смазка чернеет, подшипники греются. Для разрыва контура прохождения подшипниковых токов на неприводной конец вала устанавливается изолированный подшипник. При этом по условиям безопасности установка изолированных подшипников с двух сторон двигателя не допустима. Величина подшипниковых токов становится опасной для безаварийной работы двигателя при напряжении между противоположными концами вала более 0,5 В. Поэтому установка изолированного подшипника обычно требуется для электродвигателей с высотой оси вращения более 280 мм. Необходимо отметить, что в случае отклонения условий эксплуатации двигателя (например, температуры окружающей среды или высоты над уровнем моря), мощность нагрузки должна быть изменена. Кроме того, при снижении мощности нагрузки в определенные моменты времени для рационального использования двигателя может быть изменена схема соединения обмотки, а, следовательно, и фазное напряжение. ©2012-2017 НТЦ Энерго-Ресурс Источники: http://electricalschool.info/ecalc/1326-raschet-moshhnosti-trekhfaznogo-toka.html, http://fazanet.ru/raschet-toka-elektrodvigatelya.html, http://en-res.ru/stati/vybor-elektrodvigatelya-i-raschet-ego-rabochix-parametrov.html electricremont.ru Данная глава посвящена вращающему моменту: что это такое, для чего он нужен и др. Мы также разберём типы нагрузок в зависимости от моделей насосов и соответствие между электродвигателем и нагрузкой насоса. Вы когда-нибудь пробовали провернуть вал пустого насоса руками? Теперь представьте, что вы поворачиваете его, когда насос заполнен водой. Вы почувствуете, что в этом случае, чтобы создать вращающий момент, требуется гораздо большее усилие. А теперь представьте, что вам надо крутить вал насоса несколько часов подряд. Вы бы устали быстрее, если бы насос был заполнен водой, и почувствовали бы, что потратили намного больше сил за тот же период времени, чем при выполнении тех же манипуляций с пустым насосом. Ваши наблюдения абсолютно верны: требуется большая мощность, которая является мерой работы (потраченной энергии) в единицу времени. Как правило, мощность стандартного электродвигателя выражается в кВт. Вращающий момент (T) - это произведение силы на плечо силы. В Европе он измеряется в Ньютонах на метр (Нм). Как видно из формулы, вращающий момент увеличивается, если возрастает сила или плечо силы - или и то и другое. Например, если мы приложим к валу силу в 10 Н, эквивалентную 1 кг, при длине рычага (плече силы) 1 м, в результате, вращающий момент будет 10 Нм. При увеличении силы до 20 Н или 2 кг, вращающий момент будет 20 Нм. Таким же образом, вращающий момент был бы 20 Нм, если бы рычаг увеличился до 2 м, а сила составляла 10 Н. Или при вращающем моменте в 10 Нм с плечом силы 0,5 м сила должна быть 20 Н. Теперь остановимся на таком понятии как «работа», которое в данном контексте имеет особое значение. Работа совершается всякий раз, когда сила - любая сила - вызывает движение. Работа равна силе, умноженной на расстояние. Для линейного движения мощность выражается как работа в определённый момент времени. Если мы говорим о вращении, мощность выражается как вращающий момент (T), умноженный на частоту вращения (w). Частота вращения объекта определяется измерением времени, за которое определённая точка вращающегося объекта совершит полный оборот. Обычно эта величина выражается в оборотах в минуту, т.е. мин-1 или об/мин. Например, если объект совершает 10 полных оборотов в минуту, это означает, что его частота вращения: 10 мин-1 или 10 об/мин. Итак, частота вращения измеряется в оборотах в минуту, т.е. мин-1. Приведем единицы измерения к общему виду. Для наглядности возьмём разные электродвигатели, чтобы более подробно проанализировать соотношение между мощностью, вращающим моментом и частотой вращения. Несмотря на то, что вращающий момент и частота вращения электродвигателей сильно различаются, они могут иметь одинаковую мощность. Например, предположим, что у нас 2-полюсный электродвигатель (с частотой вращения 3000 мин-1) и 4-полюсной электродвигатель (с частотой вращения 1500 мин-1). Мощность обоих электродвигателей 3,0 кВт, но их вращающие моменты отличаются. Таким образом, вращающий момент 4-полюсного электродвигателя в два раза больше вращающего момента двухполюсного электродвигателя с той же мощностью. Как образуется вращающий момент и частота вращения? Теперь, после того, как мы изучили основы вращающего момента и скорости вращения, следует остановиться на том, как они создаются. В электродвигателях переменного тока вращающий момент и частота вращения создаются в результате взаимодействия между ротором и вращающимся магнитным полем. Магнитное поле вокруг обмоток ротора будет стремиться к магнитному полю статора. В реальных рабочих условиях частота вращения ротора всегда отстаёт от магнитного поля. Таким образом, магнитное поле ротора пересекает магнитное поле статора и отстает от него и создаёт вращающий момент. Разницу в частоте вращения ротора и статора, которая измеряется в %, называют скоростью скольжения. Скольжение является основным параметром электродвигателя, характеризующий его режим работы и нагрузку. Чем больше нагрузка, с которой должен работать электродвигатель, тем больше скольжение. Помня о том, что было сказано выше, разберём ещё несколько формул. Вращающий момент индукционного электродвигателя зависит от силы магнитных полей ротора и статора, а также от фазового соотношения между этими полями. Это соотношение показано в следующей формуле: Сила магнитного поля, в первую очередь, зависит от конструкции статора и материалов, из которых статор изготовлен. Однако напряжение и частота тока также играют важную роль. Отношение вращающих моментов пропорционально квадрату отношения напряжений, т.е. если подаваемое напряжение падает на 2%, вращающий момент, следовательно, уменьшается на 4%. Ток ротора индуцируется через источник питания, к которому подсоединён электродвигатель, а магнитное поле частично создаётся напряжением. Входную мощность можно вычислить, если нам известны данные источника питания электродвигателя, т.е. напряжение, коэффициент мощности, потребляемый ток и КПД. В Европе мощность на валу обычно измеряется в киловаттах. В США мощность на валу измеряется в лошадиных силах (л.с.). Если вам необходимо перевести лошадиные силы в киловатты, просто умножьте соответствующую величину (в лошадиных силах) на 0,746. Например, 20 л.с. равняется (20 • 0,746) = 14,92 кВт. И наоборот, киловатты можно перевести в лошадиные силы умножением величины в киловаттах на 1,341. Это значит, что 15 кВт равняется 20,11 л.с. Мощность [кВт или л.с.] связывает вращающий момент с частотой вращения, чтобы определить общий объём работы, который должен быть выполнен за определённый промежуток времени. Рассмотрим взаимодействие между вращающим моментом, мощностью и частотой вращения, а также их связь с электрическим напряжением на примере электродвигателей Grundfos. Электродвигатели имеют одну и ту же номинальную мощность как при 50 Гц, так и при 60 Гц. Это влечёт за собой резкое снижение вращающего момента при 60 Гц: частота 60 Гц вызывает 20%-ное увеличение числа оборотов, что приводит к 20%-ному уменьшению вращающего момента. Большинство производителей предпочитают указывать мощность электродвигателя при 60 Гц, таким образом, при снижении частоты тока в сети до 50 Гц электродвигатели будут обеспечивать меньшую мощность на валу и вращающий момент. Электродвигатели обеспечивают одинаковую мощность при 50 и 60 Гц. Графическое представление вращающего момента электродвигателя изображено на рисунке. Иллюстрация представляет типичную характеристику вращающий момент/частота вращения. Ниже приведены термины, используемые для характеристики вращающего момента электродвигателя переменного тока. Пусковой момент (Мп): Механический вращающий момент, развиваемый электродвигателем на валу при пуске, т.е. когда через электродвигатель пропускается ток при полном напряжении, при этом вал застопорен. Минимальный пусковой момент (Ммин): Этот термин используется для обозначения самой низкой точки на кривой вращающий момент/частота вращения электродвигателя, нагрузка которого увеличивается до полной скорости вращения. Для большинства электродвигателей Grundfos величина минимального пускового момента отдельно не указывается, так как самая низкая точка находится в точке заторможенного ротора. В результате для большинства электродвигателей Grundfos минимальный пусковой момент такой же, как пусковой момент. Блокировочный момент (Мблок): Максимальный вращающий момент - момент, который создаёт электродвигатель переменного тока с номинальным напряжением, подаваемым при номинальной частоте, без резких скачков скорости вращения. Его называют предельным перегрузочным моментом или максимальным вращающим моментом. Вращающий момент при полной нагрузке (Мп.н.): Вращающий момент, необходимый для создания номинальной мощности при полной нагрузке. Выделяют следующие типы нагрузок: Постоянная мощность Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п. Постоянный вращающий момент Как видно из названия - «постоянный вращающий момент» - подразумевается, что величина вращающего момента, необходимого для приведения в действие какого- либо механизма, постоянна, независимо от скорости вращения. Примером такого режима работы могут служить конвейеры. Переменный вращающий момент и мощность «Переменный вращающий момент» - эта категория представляет для нас наибольший интерес. Этот момент имеет отношение к нагрузкам, для которых требуется низкий вращающий момент при низкой частоте вращения, а при увеличении скорости вращения требуется более высокий вращающий момент. Типичным примером являются центробежные насосы. Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности. Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами. Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%. Во-вторых, напор насоса будет меняться пропорционально квадрату изменения скорости вращения. Если частота вращения увеличивается на 25%, напор возрастает на 56%. В-третьих, что особенно интересно, мощность пропорциональна кубу изменения скорости вращения. Это означает, что если требуемая частота вращения уменьшается на 50%, это равняется 87,5%-ному уменьшению потребляемой мощности. Итак, законы подобия объясняют, почему использование приводов с переменной частотой вращения более целесообразно в тех областях применения, где требуются переменные значения расхода и давления. Grundfos предлагает ряд электродвигателей со встроенным частотным преобразователем, который регулирует частоту вращения для достижения именно этой цели. Так же как подача, давление и мощность, потребная величина вращающего момента зависит от скорости вращения. На рисунке показан центробежный насос в разрезе. Требования к вращающему моменту для такого типа нагрузки почти противоположны требованиям при «постоянной мощности». Для нагрузок при переменном вращающем моменте потребный вращающий момент при низкой частоте вращения - мал, а потребный вращающий момент при высокой частоте вращения - велик. В математическом выражении вращающий момент пропорционален квадрату скорости вращения, а мощность - кубу скорости вращения. Это можно проиллюстрировать на примере характеристики вращающий момент/частота вращения, которую мы использовали ранее, когда рассказывали о вращающем моменте электродвигателя: Когда электродвигатель набирает скорость от нуля до номинальной скорости, вращающий момент может значительно меняться. Величина вращающего момента, необходимая при определённой нагрузке, также изменяется с частотой вращения. Чтобы электродвигатель подходил для определённой нагрузки, необходимо чтобы величина вращающего момента электродвигателя всегда превышала вращающий момент, необходимый для данной нагрузки. В примере, центробежный насос при номинальной нагрузке имеет вращающий момент, равный 70 Нм, что соответствует 22 кВт при номинальной частоте вращения 3000 мин-1. В данном случае насосу при пуске требуется 20% вращающего момента при номинальной нагрузке, т.е. приблизительно 14 Нм. После пуска вращающий момент немного падает, а затем, по мере того, как насос набирает скорость, увеличивается до величины полной нагрузки. Очевидно, что нам необходим насос, который будет обеспечивать требуемые значения расход/напор (Q/H). Это значит, что нельзя допускать остановок электродвигателя, кроме того, электродвигатель должен постоянно ускоряться до тех пор, пока не достигнет номинальной скорости. Следовательно, необходимо, чтобы характеристика вращающего момента совпадала или превышала характеристику нагрузки на всём диапазоне от 0% до 100% скорости вращения. Любой «избыточный» момент, т.е. разница между кривой нагрузки и кривой электродвигателя, используется как ускорение вращения. Если нужно определить, отвечает ли вращающий момент определённого электродвигателя требованиям нагрузки, Вы можете сравнить характеристики скорости вращения/вращающего момента электродвигателя с характеристикой скорости вращения/ вращающего момента нагрузки. Вращающий момент, создаваемый электродвигателем, должен превышать потребный для нагрузки вращающий момент, включая периоды ускорения и полной скорости вращения. Характеристика зависимости вращающего момента от скорости вращения стандартного электродвигателя и центробежного насоса. Если мы посмотрим на характеристику , то увидим, что при ускорении электродвигателя его пуск производится при токе, соответствующем 550% тока полной нагрузки. Когда двигатель приближается к своему номинальному значению скорости вращения, ток снижается. Как и следовало ожидать, во время начального периода пуска потери на электродвигателе высоки, поэтому этот период не должен быть продолжительным, чтобы не допустить перегрева. Очень важно, чтобы максимальная скорость вращения достигалась как можно точнее. Это связано с потребляемой мощностью: например, увеличение скорости вращения на 1% по сравнению со стандартным максимумом приводит к 3%-ному увеличению потребляемой мощности. Потребляемая мощность пропорциональна диаметру рабочего колеса насоса в четвертой степени. Уменьшение диаметра рабочего колеса насоса на 10% приводит к уменьшению потребляемой мощности на (1- (0.9 * 0.9 * 0.9 * 0.9)) * 100 = 34%, что равно 66% номинальной мощности. Эта зависимость определяется исключительно на практике, так как зависит от типа насоса, конструкции рабочего колеса и от того, насколько вы уменьшаете диаметр рабочего колеса. Если нам необходимо подобрать типоразмер электродвигателя для определённой нагрузки, например для центробежных насосов, основная наша задача состоит в том, чтобы обеспечить соответствующий вращающий момент и мощность в номинальной рабочей точке, потому что пусковой момент для центробежных насосов довольно низкий. Время пуска достаточно ограниченно, так как вращающий момент довольно высокий. Нередко для сложных систем защиты и контроля электродвигателей требуется некоторое время для их пуска, чтобы они могли замерить пусковой ток электродвигателя. Время пуска электродвигателя и насоса рассчитывается с помощью следующей формулы: tпуск = время, необходимое электродвигателю насоса, чтобы достичь частоты вращения при полной нагрузке n = частота вращения электродвигателя при полной нагрузке Iобщ = инерция, которая требует ускорения, т.е. инерция вала электродвигателя, ротора, вала насоса и рабочих колёс. Момент инерции для насосов и электродвигателей можно найти в соответствующих технических данных. Мизб = избыточный момент, ускоряющий вращение. Избыточный момент равен вращающему моменту электродвигателя минус вращающий момент насоса при различных частотах вращения. Мизб можно рассчитать по следующим формулам: Как видно из приведённых вычислений, выполненных для данного примера с электродвигателем мощностью 4 кВт насоса CR, время пуска составляет 0,11 секунды. Современные сложные системы управления электродвигателями могут контролировать число пусков в час каждого конкретного насоса и электродвигателя. Необходимость контроля этого параметра состоит в том, что каждый раз, когда осуществляется пуск электродвигателя с последующим ускорением, отмечается высокое потребление пускового тока. Пусковой ток нагревает электродвигатель. Если электродвигатель не остывает, продолжительная нагрузка от пускового тока значительно нагревает обмотки статора электродвигателя, что приводит к выходу из строя электродвигателя или сокращению срока службы изоляции. Обычно за количество пусков, которое может выполнить электродвигатель в час, отвечает поставщик электродвигателя. Например, Grundfos указывает максимальное число пусков в час в технических данных на насос, так как максимальное количество пусков зависит от момента инерции насоса. Существует прямая связь между мощностью, потребляемой электродвигателем от сети, мощностью на валу электродвигателя и гидравлической мощностью, развиваемой насосом. При производстве насосов используются следующие обозначения этих трёх различных типов мощности. P1 (кВт) Входная электрическая мощность насосов - это мощность, которую электродвигатель насоса получает от источника электрического питания. Мощность P! равна мощности P2, разделённой на КПД электродвигателя. P2 (кВт) Мощность на валу электродвигателя - это мощность, которую электродвигатель передает на вал насоса. Р3 (кВт) Входная мощность насоса = P2, при условии, что соединительная муфта между валами насоса и электродвигателя не рассеивает энергию. Р4 (кВт) Гидравлическая мощность насоса. www.eti.su Расчётные формулы электродвигателей Ток в статоре трёхфазного электродвигателя при номинальной нагрузке, а
где Рн — номинальная мощность электродвигателя, квт, η — к. п. д. электродвигателя, cos φ— коэффициент мощности, U — напряжение на зажимах электродвигателя, в. Синхронное число оборотов электродвигателя где р —число пар полюсов обмотки статора электродвигателя, f — частота. Номинальное число оборотов асинхронного электродвигателя где s — скольжение асинхронного электродвигателя, %. Скольжение асинхронного электродвигателя, % Номинальный момент вращения электродвигателя, кГ·м где D — диаметр шкива, м; F — усилие, передаваемое ремнём, кГ. Количество тепла, выделяемого электродвигателем в 1 сек, ккал/сек где Окружная скорость (шкива, вала, коллектора, ротора), м/сек. где D — диаметр соответствующего элемента машины, м. Коэффициент полезного действия (к. п. д.) асинхронного электродвигателя при регулировании скорости реостатом в цепи ротора где прег — пониженное число оборотов двигателя в минуту; ηрег — к. п. д. при пониженном числе оборотов. Соотношения между единицами измерения работы Соотношения между единицами измерения мощности trudova-ohrana.ru Расчётные формулы электродвигателей Ток в статоре трёхфазного электродвигателя при номинальной нагрузке, а
где Рн — номинальная мощность электродвигателя, квт, η — к. п. д. электродвигателя, cos φ— коэффициент мощности, U — напряжение на зажимах электродвигателя, в. Синхронное число оборотов электродвигателя где р —число пар полюсов обмотки статора электродвигателя, f — частота. Номинальное число оборотов асинхронного электродвигателя где s — скольжение асинхронного электродвигателя, %. Скольжение асинхронного электродвигателя, % Номинальный момент вращения электродвигателя, кГ·м где D — диаметр шкива, м; F — усилие, передаваемое ремнём, кГ. Количество тепла, выделяемого электродвигателем в 1 сек, ккал/сек где Окружная скорость (шкива, вала, коллектора, ротора), м/сек. где D — диаметр соответствующего элемента машины, м. Коэффициент полезного действия (к. п. д.) асинхронного электродвигателя при регулировании скорости реостатом в цепи ротора где прег — пониженное число оборотов двигателя в минуту; ηрег — к. п. д. при пониженном числе оборотов. Соотношения между единицами измерения работы Соотношения между единицами измерения мощности trudova-ohrana.ru Для расчета мощности, кВт, и вращающего момента, Н·м, на валу двигателя следует пользоваться формулами: вращательное движение подъем груза привод вентилятора где κ — коэффициент, учитывающий действие противовеса;v — скорость подъема груза, м/с;Q — расход воздуха, м³/с;р — давление на выходе вентилятора, Па;g — ускорение свободного падения, м/с²;η — КПД вентилятора, подъемника;m — масса, кг;n — частота вращения об/мин. Полученные значения следует увеличить до ближайшего каталожного значения. Двигатели эксплуатируются в самых разнообразных режимах.Учет режима работы имеет большое значение при подборе двигателя. Мощности двигателей, указанные в каталогах, приведены для режима S1 и нормальных условий работы, кроме двигателей с повышенным скольжением. Если двигатель работает в режиме S2 или SЗ, он нагревается меньше, чем в режиме S1, и поэтому он допускает большую мощность на валу. При работе в режиме S2 допустимая мощность может быть повышена на 50 % при длительности нагружения 10 мин, на 25 % — при длительности нагружения 30 мин, на 10% — при длительности нагружения 90 мин. Для режима SЗ рекомендуются двигатели с повышенным скольжением. Подробнее, о номинальных данных электрических машин, здесь. Источник: Кравчик А.Э. и др. Выбор и применение асинхронных двигателей. electrichelp.ruКалькулятор расчета мощности двигателя автомобиля. Формула мощность электродвигателя
Расчет мощности электродвигателя - ElectrikTop.ru

Как выбрать электродвигатель
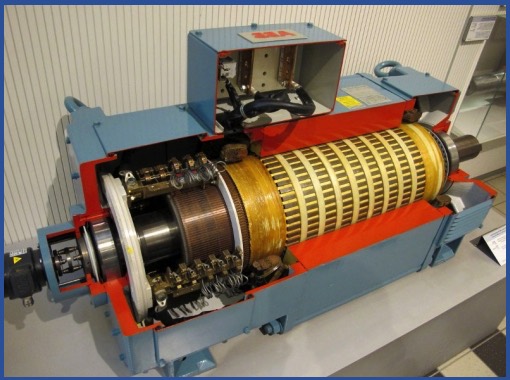
Синхронные электрические машины
Двигатели постоянного тока
 Синхронизация их положения относительно друг друга происходит особого устройства – коллектора, расположенного на валу ротора. Это кольцо из меди, поделенное на секторы диэлектриком. Концы обмоток ротора подключаются к этим секторам и создают контактные пары.
Синхронизация их положения относительно друг друга происходит особого устройства – коллектора, расположенного на валу ротора. Это кольцо из меди, поделенное на секторы диэлектриком. Концы обмоток ротора подключаются к этим секторам и создают контактные пары.Коллекторные двигатели
Синхронные электродвигатели переменного тока
 У них статорная обмотка питается переменным трехфазным током, а роторная – постоянным. Чтобы их магнитные полюса сцепились и вызвали движение вала, такой электродвигатель надо раскрутить вручную или другим мотором. Фактически они являются генератором переменного тока, работающим в режиме вращения. Достоинством машины являются высокий крутящий момент и стабильность частоты вращения.
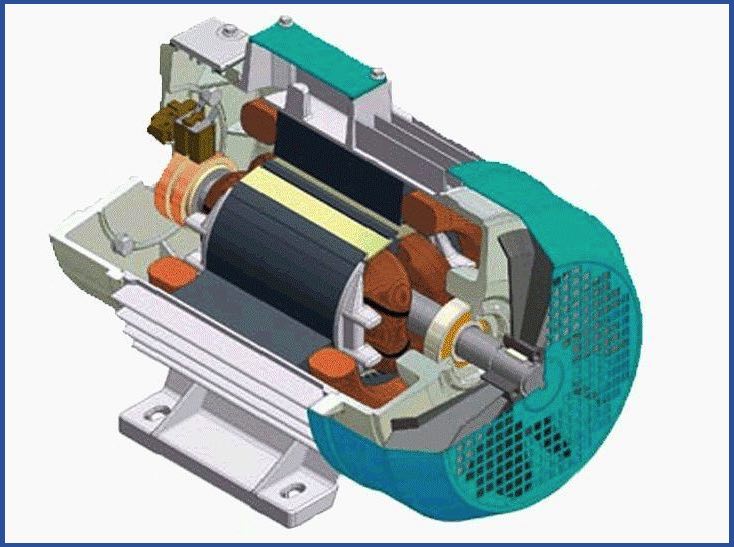
У них статорная обмотка питается переменным трехфазным током, а роторная – постоянным. Чтобы их магнитные полюса сцепились и вызвали движение вала, такой электродвигатель надо раскрутить вручную или другим мотором. Фактически они являются генератором переменного тока, работающим в режиме вращения. Достоинством машины являются высокий крутящий момент и стабильность частоты вращения.Асинхронные электрические машины
Двигатели с короткозамкнутым ротором
 После набора оборотов он имеет очень стабильный вращающий момент на валу и хорошо выдерживает перегрузки. Главными достоинствами таких двигателей является его простота и надежность, благодаря которым они очень широко распространены. Недостатками – сложность управления.
После набора оборотов он имеет очень стабильный вращающий момент на валу и хорошо выдерживает перегрузки. Главными достоинствами таких двигателей является его простота и надежность, благодаря которым они очень широко распространены. Недостатками – сложность управления.Двигатели с фазным ротором
 В отличие от коллектора двигателя постоянного тока они не поделены на сектора. При запуске такой машины используется трехфазный реостат, сопротивление которого в момент пуска максимальное. Постепенно уменьшая активное сопротивление ротора, добиваются плавной раскрутки вала электродвигателя. При достижении номинальных оборотов его закорачивают.
В отличие от коллектора двигателя постоянного тока они не поделены на сектора. При запуске такой машины используется трехфазный реостат, сопротивление которого в момент пуска максимальное. Постепенно уменьшая активное сопротивление ротора, добиваются плавной раскрутки вала электродвигателя. При достижении номинальных оборотов его закорачивают.Как рассчитать мощность электродвигателя
Калькулятор расчета мощности двигателя автомобиля
Как рассчитать мощность через крутящий момент
Крутящий момент

Обороты двигателя
Как рассчитать мощность по объему двигателя

Расчет мощности двигателя по расходу воздуха
Расчет мощности по массе и времени разгона до сотни

Расчет мощности ДВС по производительности форсунок

Расчет тока двигателя по мощности
Расчет мощности трехфазного тока










Статьи и схемы
Полезное для электрика
Расчет тока электродвигателя
 Привет посетители сайта fazanet.ru, и в сегодняшней статье мы с вами разберём, как же сделать, этот непонятный расчёт тока электродвигателя. Каждый уважающий себя электромонтёр, робота которого связана с обслуживанием электрических, машин просто обязан это знать. Я в своё время тоже помню, что меня это очень сильно интересовало, когда меня перевили с одного цеха в другой. А конкретно именно работать электромонтёром.
Привет посетители сайта fazanet.ru, и в сегодняшней статье мы с вами разберём, как же сделать, этот непонятный расчёт тока электродвигателя. Каждый уважающий себя электромонтёр, робота которого связана с обслуживанием электрических, машин просто обязан это знать. Я в своё время тоже помню, что меня это очень сильно интересовало, когда меня перевили с одного цеха в другой. А конкретно именно работать электромонтёром.
Как определить ток электродвигателя на практике.
Читайте также статьи:
 Хочешь получать статьи этого блога на почту?
Хочешь получать статьи этого блога на почту?Выбор электродвигателя и расчет его рабочих параметров
Типы электрических двигателей
Двигатели постоянного тока
Синхронные двигатели
Асинхронные двигатели.
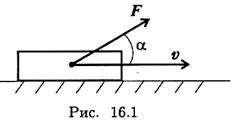
Мощность и моменты
Мощность и вращающий момент электродвигателя. Что это такое?
Мощность и вращающий момент электродвигателя




Работа и мощность








Потребляемая мощность электродвигателя

Момент электродвигателя


Нагрузка насосов и типы нагрузки электродвигателя






Соответствие электродвигателя нагрузке



Время пуска электрдвигателя






Число пусков электродвигателя в час
Мощность и КПД (eta) электродвигателя

Расчётные формулы электродвигателей



 квт — сумма потерь в электродвигателе.
квт — сумма потерь в электродвигателе. 


Расчётные формулы электродвигателей
квт — сумма потерь в электродвигателе. Расчет мощности и вращающего момента на валу двигателя
*10^-3") ;
;*P*10^3") ;
;*10^-3") ;
;*10^-3") ,
,Помощь студентам

интернет-магазин светодиодного освещения
Пн - Вс с 10:30 до 20:00
Санкт-Петербург, просп. Энгельса, 138, корп. 1, тк ''Стройдвор''










Поделиться с друзьями: